Modelagem de Sistemas Mecânicos
Neste capítulo, vamos discutir o differential equation modelingde sistemas mecânicos. Existem dois tipos de sistemas mecânicos com base no tipo de movimento.
- Sistemas mecânicos translacionais
- Sistemas mecânicos rotacionais
Modelagem de Sistemas Mecânicos Translacionais
Sistemas mecânicos translacionais movem-se ao longo de um straight line. Esses sistemas consistem principalmente em três elementos básicos. Esses são massa, mola e painel ou amortecedor.
Se uma força é aplicada a um sistema mecânico translacional, então ela é oposta por forças opostas devido à massa, elasticidade e fricção do sistema. Como a força aplicada e as forças opostas estão em direções opostas, a soma algébrica das forças que atuam no sistema é zero. Vejamos agora a força que esses três elementos enfrentam individualmente.
Massa
A massa é propriedade de um corpo, que armazena kinetic energy. Se uma força é aplicada em um corpo com massaM, então ele é oposto por uma força oposta devido à massa. Essa força oposta é proporcional à aceleração do corpo. Suponha que a elasticidade e o atrito são desprezíveis.

$$ F_m \ propto \: a $$
$$ \ Rightarrow F_m = Ma = M \ frac {\ text {d} ^ 2x} {\ text {d} t ^ 2} $$
$$ F = F_m = M \ frac {\ text {d} ^ 2x} {\ text {d} t ^ 2} $$
Onde,
F é a força aplicada
Fm é a força oposta devido à massa
M é massa
a é aceleração
x é deslocamento
Primavera
Spring é um elemento que armazena potential energy. Se uma força for aplicada na molaK, então ela é oposta por uma força oposta devido à elasticidade da mola. Essa força oposta é proporcional ao deslocamento da mola. Suponha que a massa e o atrito sejam desprezíveis.

$$ F \ propto \: x $$
$$ \ Rightarrow F_k = Kx $$
$$ F = F_k = Kx $$
Onde,
F é a força aplicada
Fk é a força oposta devido à elasticidade da mola
K é constante de primavera
x é deslocamento
Dashpot
Se uma força for aplicada no painel B, então ele é oposto por uma força oposta devido a frictiondo painel de controle. Essa força oposta é proporcional à velocidade do corpo. Suponha que a massa e a elasticidade sejam desprezíveis.

$$ F_b \ propto \: \ nu $$
$$ \ Rightarrow F_b = B \ nu = B \ frac {\ text {d} x} {\ text {d} t} $$
$$ F = F_b = B \ frac {\ text {d} x} {\ text {d} t} $$
Onde,
Fb é a força oposta devido ao atrito do painel
B é o coeficiente de atrito
v é velocidade
x é deslocamento
Modelagem de Sistemas Mecânicos Rotacionais
Os sistemas mecânicos rotacionais movem-se em torno de um eixo fixo. Esses sistemas consistem principalmente em três elementos básicos. Esses sãomoment of inertia, torsional spring e dashpot.
Se um torque é aplicado a um sistema mecânico rotacional, ele é oposto por torques opostos devido ao momento de inércia, elasticidade e fricção do sistema. Como o torque aplicado e os torques opostos estão em direções opostas, a soma algébrica dos torques atuando no sistema é zero. Vejamos agora o torque enfrentado por esses três elementos individualmente.
Momento de inércia
No sistema mecânico translacional, a massa armazena energia cinética. Da mesma forma, no sistema mecânico rotacional, o momento de inércia armazenakinetic energy.
Se um torque for aplicado em um corpo tendo momento de inércia J, então ele é oposto por um torque oposto devido ao momento de inércia. Este torque oposto é proporcional à aceleração angular do corpo. Suponha que a elasticidade e o atrito são desprezíveis.

$$ T_j \ propto \: \ alpha $$
$$ \ Rightarrow T_j = J \ alpha = J \ frac {\ text {d} ^ 2 \ theta} {\ text {d} t ^ 2} $$
$$ T = T_j = J \ frac {\ text {d} ^ 2 \ theta} {\ text {d} t ^ 2} $$
Onde,
T é o torque aplicado
Tj é o torque oposto devido ao momento de inércia
J é o momento de inércia
α é aceleração angular
θ é o deslocamento angular
Mola de Torção
No sistema mecânico translacional, a mola armazena energia potencial. Da mesma forma, no sistema mecânico rotacional, armazena a mola de torçãopotential energy.
Se um torque for aplicado na mola de torção K, então ele é oposto por um torque oposto devido à elasticidade da mola de torção. Este torque oposto é proporcional ao deslocamento angular da mola de torção. Suponha que o momento de inércia e fricção sejam desprezíveis.
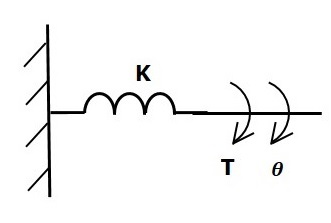
$$ T_k \ propto \: \ theta $$
$$ \ Rightarrow T_k = K \ theta $$
$$ T = T_k = K \ theta $$
Onde,
T é o torque aplicado
Tk é o torque oposto devido à elasticidade da mola de torção
K é a constante de torção da mola
θ é o deslocamento angular
Dashpot
Se um torque for aplicado no painel de instrumentos B, então ele é oposto por um torque oposto devido ao rotational frictiondo painel de controle. Este torque oposto é proporcional à velocidade angular do corpo. Suponha que o momento de inércia e a elasticidade sejam desprezíveis.
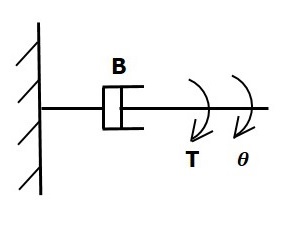
$$ T_b \ propto \: \ omega $$
$$ \ Rightarrow T_b = B \ omega = B \ frac {\ text {d} \ theta} {\ text {d} t} $$
$$ T = T_b = B \ frac {\ text {d} \ theta} {\ text {d} t} $$
Onde,
Tb é o torque oposto devido ao atrito rotacional do painel de instrumentos
B é o coeficiente de atrito rotacional
ω é a velocidade angular
θ é o deslocamento angular