Pemodelan Sistem Mekanik
Dalam bab ini, mari kita bahas differential equation modelingsistem mekanis. Ada dua jenis sistem mekanik berdasarkan jenis geraknya.
- Sistem mekanis translasi
- Sistem mekanis rotasi
Pemodelan Sistem Mekanik Translasional
Sistem mekanis translasi bergerak sepanjang a straight line. Sistem ini terutama terdiri dari tiga elemen dasar. Yaitu massa, pegas dan dasbor atau peredam.
Jika suatu gaya diterapkan pada sistem mekanik translasi, maka gaya tersebut dilawan oleh gaya lawan karena massa, elastisitas, dan gesekan sistem. Karena gaya yang diterapkan dan gaya yang berlawanan berada pada arah yang berlawanan, jumlah aljabar gaya yang bekerja pada sistem adalah nol. Sekarang mari kita lihat gaya yang ditentang oleh ketiga elemen ini secara individual.
Massa
Massa adalah milik tubuh yang menyimpan kinetic energy. Jika gaya diterapkan pada benda bermassaM, kemudian dilawan oleh gaya lawan karena massa. Gaya yang berlawanan ini sebanding dengan percepatan benda. Asumsikan elastisitas dan gesekan dapat diabaikan.

$$ F_m \ propto \: a $$
$$ \ Rightarrow F_m = Ma = M \ frac {\ text {d} ^ 2x} {\ text {d} t ^ 2} $$
$$ F = F_m = M \ frac {\ teks {d} ^ 2x} {\ teks {d} t ^ 2} $$
Dimana,
F adalah gaya yang diterapkan
Fm adalah gaya lawan karena massa
M adalah massa
a adalah akselerasi
x adalah perpindahan
Musim semi
Musim semi adalah elemen yang menyimpan potential energy. Jika gaya diterapkan pada pegasK, kemudian dilawan oleh gaya berlawanan karena elastisitas pegas. Gaya yang berlawanan ini sebanding dengan perpindahan pegas. Asumsikan massa dan gesekan dapat diabaikan.

$$ F \ propto \: x $$
$$ \ Rightarrow F_k = Kx $$
$$ F = F_k = Kx $$
Dimana,
F adalah gaya yang diterapkan
Fk adalah gaya berlawanan karena elastisitas pegas
K adalah konstanta pegas
x adalah perpindahan
Dashpot
Jika gaya diterapkan pada dashpot B, kemudian ditentang oleh kekuatan lawan karena frictiondari dashpot. Gaya yang berlawanan ini sebanding dengan kecepatan benda. Asumsikan massa dan elastisitas dapat diabaikan.

$$ F_b \ propto \: \ nu $$
$$ \ Rightarrow F_b = B \ nu = B \ frac {\ text {d} x} {\ text {d} t} $$
$$ F = F_b = B \ frac {\ text {d} x} {\ text {d} t} $$
Dimana,
Fb adalah gaya yang berlawanan karena gesekan dari dashpot
B adalah koefisien gesekan
v adalah kecepatan
x adalah perpindahan
Pemodelan Sistem Mekanik Rotasi
Sistem mekanis rotasi bergerak pada sumbu tetap. Sistem ini terutama terdiri dari tiga elemen dasar. Yaitumoment of inertia, torsional spring dan dashpot.
Jika torsi diterapkan pada sistem mekanis rotasi, maka torsi tersebut akan berlawanan dengan torsi yang berlawanan karena momen inersia, elastisitas, dan gesekan sistem. Karena torsi yang diterapkan dan torsi yang berlawanan berada pada arah yang berlawanan, jumlah aljabar torsi yang bekerja pada sistem adalah nol. Sekarang mari kita lihat torsi yang ditentang oleh ketiga elemen ini secara individual.
Momen inersia
Dalam sistem mekanik translasi, massa menyimpan energi kinetik. Demikian pula dalam sistem mekanik rotasi, penyimpanan momen inersiakinetic energy.
Jika torsi diterapkan pada benda yang mengalami momen inersia J, kemudian dilawan oleh torsi berlawanan karena momen inersia. Torsi yang berlawanan ini sebanding dengan percepatan sudut tubuh. Asumsikan elastisitas dan gesekan dapat diabaikan.

$$ T_j \ propto \: \ alpha $$
$$ \ Rightarrow T_j = J \ alpha = J \ frac {\ text {d} ^ 2 \ theta} {\ text {d} t ^ 2} $$
$$ T = T_j = J \ frac {\ text {d} ^ 2 \ theta} {\ text {d} t ^ 2} $$
Dimana,
T adalah torsi yang diterapkan
Tj adalah torsi lawan karena momen inersia
J adalah momen inersia
α adalah percepatan sudut
θ adalah perpindahan sudut
Pegas Torsional
Dalam sistem mekanik translasi, pegas menyimpan energi potensial. Demikian pula dalam sistem mekanik rotasi, penyimpanan pegas torsipotential energy.
Jika torsi diterapkan pada pegas torsi K, kemudian dilawan oleh torsi yang berlawanan karena elastisitas pegas torsi. Torsi yang berlawanan ini sebanding dengan perpindahan sudut dari pegas torsi. Asumsikan bahwa momen inersia dan gesekan dapat diabaikan.
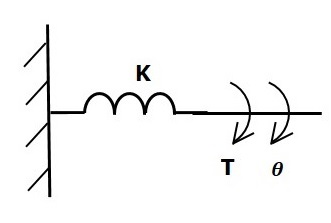
$$ T_k \ propto \: \ theta $$
$$ \ Rightarrow T_k = K \ theta $$
$$ T = T_k = K \ theta $$
Dimana,
T adalah torsi yang diterapkan
Tk adalah torsi lawan karena elastisitas pegas torsi
K adalah konstanta pegas torsi
θ adalah perpindahan sudut
Dashpot
Jika torsi diterapkan pada dashpot B, kemudian ditentang oleh torsi yang berlawanan karena rotational frictiondari dashpot. Torsi yang berlawanan ini sebanding dengan kecepatan sudut benda. Asumsikan momen inersia dan elastisitas dapat diabaikan.
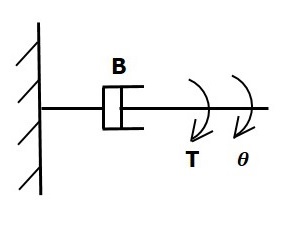
$$ T_b \ propto \: \ omega $$
$$ \ Rightarrow T_b = B \ omega = B \ frac {\ text {d} \ theta} {\ text {d} t} $$
$$ T = T_b = B \ frac {\ text {d} \ theta} {\ text {d} t} $$
Dimana,
Tb adalah torsi lawan karena gesekan rotasi dari dashpot
B adalah koefisien gesekan rotasi
ω adalah kecepatan sudut
θ adalah perpindahan sudut