Sistem Kontrol - Panduan Cepat
Sistem kontrol adalah sistem yang memberikan respons yang diinginkan dengan mengontrol keluaran. Gambar berikut menunjukkan diagram blok sederhana dari sistem kontrol.

Di sini, sistem kontrol diwakili oleh satu blok. Karena, output dikontrol oleh input yang berbeda-beda, sistem kontrol mendapat nama ini. Kami akan memvariasikan masukan ini dengan beberapa mekanisme. Pada bagian selanjutnya tentang sistem kontrol loop terbuka dan loop tertutup, kita akan mempelajari secara rinci tentang blok di dalam sistem kontrol dan bagaimana memvariasikan input ini untuk mendapatkan respons yang diinginkan.
Examples - Sistem kontrol lampu lalu lintas, mesin cuci
Traffic lights control systemadalah contoh sistem kendali. Di sini, urutan sinyal input diterapkan ke sistem kontrol ini dan outputnya adalah salah satu dari tiga lampu yang akan menyala untuk beberapa durasi waktu. Selama waktu ini, dua lampu lainnya akan mati. Berdasarkan studi lalu lintas di persimpangan tertentu, waktu hidup dan mati lampu dapat ditentukan. Dengan demikian, sinyal masukan mengontrol keluaran. Jadi, sistem kendali lampu lalu lintas beroperasi berdasarkan waktu.
Klasifikasi Sistem Pengendalian
Berdasarkan beberapa parameter, kita dapat mengklasifikasikan sistem kendali menjadi beberapa cara berikut.
Waktu terus menerus dan Sistem Kontrol Waktu Diskrit
Sistem Kontrol dapat diklasifikasikan sebagai sistem kontrol waktu kontinu dan sistem kontrol waktu diskrit berdasarkan type of the signal bekas.
Di continuous timesistem kontrol, semua sinyal terus menerus dalam waktu. Tapi, didiscrete time sistem kontrol, terdapat satu atau lebih sinyal waktu diskrit.
Sistem Kontrol SISO dan MIMO
Sistem Kontrol dapat diklasifikasikan sebagai sistem kontrol SISO dan sistem kontrol MIMO berdasarkan number of inputs and outputs menyajikan.
SISOSistem kontrol (Input Tunggal dan Output Tunggal) memiliki satu input dan satu output. Sedangkan,MIMO Sistem kontrol (Input Ganda dan Output Ganda) memiliki lebih dari satu input dan lebih dari satu output.
Sistem Kontrol Loop Terbuka dan Loop Tertutup
Sistem Kontrol dapat diklasifikasikan sebagai sistem kontrol loop terbuka dan sistem kontrol loop tertutup berdasarkan feedback path.
Di open loop control systems, keluaran tidak diumpankan kembali ke masukan. Jadi, aksi kontrol tidak tergantung pada output yang diinginkan.
Gambar berikut menunjukkan diagram blok dari sistem kontrol loop terbuka.

Di sini, masukan diterapkan ke pengontrol dan menghasilkan sinyal penggerak atau sinyal pengontrol. Sinyal ini diberikan sebagai masukan ke pabrik atau proses yang akan dikontrol. Jadi, pabrik menghasilkan keluaran yang dikendalikan. Sistem kendali lampu lalu lintas yang telah kita bahas sebelumnya merupakan contoh sistem kendali loop terbuka.
Di closed loop control systems, keluaran diumpankan kembali ke masukan. Jadi, aksi kontrol bergantung pada keluaran yang diinginkan.
Gambar berikut menunjukkan diagram blok sistem kontrol loop tertutup umpan balik negatif.
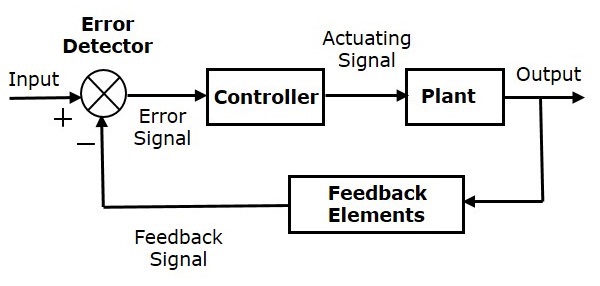
Detektor kesalahan menghasilkan sinyal kesalahan, yang merupakan perbedaan antara sinyal masukan dan umpan balik. Sinyal umpan balik ini diperoleh dari blok (elemen umpan balik) dengan mempertimbangkan keluaran dari sistem secara keseluruhan sebagai masukan untuk blok ini. Alih-alih input langsung, sinyal kesalahan diterapkan sebagai input ke pengontrol.
Jadi, pengontrol menghasilkan sinyal penggerak yang mengontrol pabrik. Dalam kombinasi ini, keluaran dari sistem kendali diatur secara otomatis hingga kita mendapatkan respon yang diinginkan. Oleh karena itu, sistem kendali loop tertutup juga disebut sistem kendali otomatis. Sistem kendali lampu lalu lintas yang memiliki sensor pada inputnya merupakan contoh sistem kendali loop tertutup.
Perbedaan antara loop terbuka dan sistem kontrol loop tertutup disebutkan dalam tabel berikut.
| Sistem Kontrol Loop Terbuka | Sistem Kontrol Loop Tertutup |
|---|---|
| Tindakan kontrol tidak tergantung pada keluaran yang diinginkan. | Tindakan kontrol bergantung pada keluaran yang diinginkan. |
| Jalur umpan balik tidak ada. | Ada jalur umpan balik. |
| Ini juga disebut sebagai non-feedback control systems. | Ini juga disebut sebagai feedback control systems. |
| Mudah didesain. | Sulit untuk didesain. |
| Ini ekonomis. | Ini lebih mahal. |
| Tidak akurat. | Tepat. |
Jika salah satu keluaran atau beberapa bagian dari keluaran dikembalikan ke sisi masukan dan digunakan sebagai bagian dari masukan sistem, maka itu dikenal sebagai feedback. Umpan balik memainkan peran penting untuk meningkatkan kinerja sistem kontrol. Dalam bab ini, mari kita bahas jenis umpan balik & efek umpan balik.
Jenis Umpan Balik
Ada dua jenis umpan balik -
- Kritik yang baik
- Umpan balik negatif
Kritik yang baik
Umpan balik positif menambahkan masukan referensi, $R(s)$dan keluaran umpan balik. Gambar berikut menunjukkan diagram blokpositive feedback control system.

Konsep fungsi transfer akan dibahas di bab-bab selanjutnya. Untuk sementara, pertimbangkan fungsi transfer sistem kendali umpan balik positif ini,
$T=\frac{G}{1-GH}$ (Persamaan 1)
Dimana,
T adalah fungsi transfer atau perolehan keseluruhan dari sistem kendali umpan balik positif.
G adalah gain loop terbuka, yang merupakan fungsi frekuensi.
H adalah perolehan jalur umpan balik, yang merupakan fungsi frekuensi.
Umpan Balik Negatif
Umpan balik negatif mengurangi kesalahan antara input referensi, $R(s)$dan keluaran sistem. Gambar berikut menunjukkan diagram blok darinegative feedback control system.

Fungsi transfer sistem kontrol umpan balik negatif adalah,
$T=\frac{G}{1+GH}$ (Persamaan 2)
Dimana,
T adalah fungsi transfer atau perolehan keseluruhan dari sistem kendali umpan balik negatif.
G adalah gain loop terbuka, yang merupakan fungsi frekuensi.
H adalah perolehan jalur umpan balik, yang merupakan fungsi frekuensi.
Turunan dari fungsi transfer di atas hadir di bab-bab selanjutnya.
Pengaruh Umpan Balik
Mari kita sekarang memahami efek umpan balik.
Pengaruh Umpan Balik pada Keuntungan Keseluruhan
Dari Persamaan 2, kita dapat mengatakan bahwa perolehan keseluruhan sistem kontrol loop tertutup umpan balik negatif adalah rasio 'G' dan (1 + GH). Jadi, keuntungan keseluruhan dapat meningkat atau menurun tergantung pada nilai (1 + GH).
Jika nilai (1 + GH) kurang dari 1, maka perolehan keseluruhan meningkat. Dalam hal ini, nilai 'GH' adalah negatif karena perolehan jalur umpan balik negatif.
Jika nilai (1 + GH) lebih besar dari 1, maka keuntungan keseluruhan berkurang. Dalam hal ini, nilai 'GH' positif karena perolehan jalur umpan balik positif.
Secara umum, 'G' dan 'H' adalah fungsi frekuensi. Jadi, umpan balik akan meningkatkan penguatan keseluruhan sistem dalam satu rentang frekuensi dan menurun di rentang frekuensi lainnya.
Pengaruh Umpan Balik pada Sensitivitas
Sensitivity dari keseluruhan perolehan umpan balik negatif sistem kontrol loop tertutup (T) ke variasi gain loop terbuka (G) didefinisikan sebagai
$S_{G}^{T} = \frac{\frac{\partial T}{T}}{\frac{\partial G}{G}}=\frac{Percentage\: change \: in \:T}{Percentage\: change \: in \:G}$ (Persamaan 3)
Dimana, ∂T adalah perubahan bertahap di T karena perubahan bertahap di G.
Kita dapat menulis ulang Persamaan 3 sebagai
$S_{G}^{T}=\frac{\partial T}{\partial G}\frac{G}{T}$ (Persamaan 4)
Lakukan diferensiasi parsial terhadap G di kedua sisi Persamaan 2.
$\frac{\partial T}{\partial G}=\frac{\partial}{\partial G}\left (\frac{G}{1+GH} \right )=\frac{(1+GH).1-G(H)}{(1+GH)^2}=\frac{1}{(1+GH)^2}$ (Persamaan 5)
Dari Persamaan 2, Anda akan mendapatkan
$\frac{G}{T}=1+GH$ (Persamaan 6)
Gantikan Persamaan 5 dan Persamaan 6 pada Persamaan 4.
$$S_{G}^{T}=\frac{1}{(1+GH)^2}(1+GH)=\frac{1}{1+GH}$$
Jadi, kami mendapatkan sensitivitydari keuntungan keseluruhan sistem kontrol loop tertutup sebagai kebalikan dari (1 + GH). Jadi, Sensitivitas dapat meningkat atau menurun tergantung pada nilai (1 + GH).
Jika nilai (1 + GH) kurang dari 1, maka sensitivitas meningkat. Dalam hal ini, nilai 'GH' negatif karena perolehan jalur umpan balik negatif.
Jika nilai (1 + GH) lebih besar dari 1, maka sensitivitas menurun. Dalam hal ini, nilai 'GH' positif karena perolehan jalur umpan balik positif.
Secara umum, 'G' dan 'H' adalah fungsi frekuensi. Jadi, umpan balik akan meningkatkan sensitivitas penguatan sistem di satu rentang frekuensi dan menurun di rentang frekuensi lainnya. Oleh karena itu, kami harus memilih nilai 'GH' sedemikian rupa sehingga sistem tidak sensitif atau kurang sensitif terhadap variasi parameter.
Pengaruh Umpan Balik pada Stabilitas
Suatu sistem dikatakan stabil, jika keluarannya terkendali. Jika tidak, dikatakan tidak stabil.
Dalam Persamaan 2, jika nilai penyebut adalah nol (yaitu, GH = -1), maka keluaran dari sistem kontrol akan menjadi tak terhingga. Sehingga, sistem kendali menjadi tidak stabil.
Oleh karena itu, kami harus memilih umpan balik dengan benar untuk membuat sistem kontrol stabil.
Pengaruh Umpan Balik pada Kebisingan
Untuk mengetahui pengaruh umpan balik terhadap derau, mari kita bandingkan hubungan fungsi transfer dengan dan tanpa umpan balik karena sinyal derau saja.
Pertimbangkan open loop control system dengan sinyal noise seperti gambar di bawah ini.

Itu open loop transfer function karena sinyal noise saja
$\frac{C(s)}{N(s)}=G_b$ (Persamaan 7)
Itu diperoleh dengan membuat input lainnya $R(s)$ sama dengan nol.
Pertimbangkan a closed loop control system dengan sinyal noise seperti gambar di bawah ini.

Itu closed loop transfer function karena sinyal noise saja
$\frac{C(s)}{N(s)}=\frac{G_b}{1+G_aG_bH}$ (Persamaan 8)
Itu diperoleh dengan membuat input lainnya $R(s)$ sama dengan nol.
Bandingkan Persamaan 7 dan Persamaan 8,
Dalam sistem kendali loop tertutup, penguatan akibat sinyal noise dikurangi dengan faktor $(1+G_a G_b H)$ asalkan istilah itu $(1+G_a G_b H)$ lebih dari satu.
Sistem kontrol dapat direpresentasikan dengan seperangkat persamaan matematika yang dikenal sebagai mathematical model. Model ini berguna untuk analisis dan desain sistem kendali. Analisis sistem kendali berarti mencari keluaran setelah kita mengetahui masukan dan model matematisnya. Perancangan sistem kendali berarti menemukan model matematis ketika kita mengetahui input dan outputnya.
Model matematika berikut ini banyak digunakan.
- Model persamaan diferensial
- Model fungsi transfer
- Model ruang negara
Mari kita bahas dua model pertama dalam bab ini.
Model Persamaan Diferensial
Model persamaan diferensial adalah model matematis domain waktu dari sistem kendali. Ikuti langkah-langkah berikut untuk model persamaan diferensial.
Terapkan hukum dasar ke sistem kontrol yang diberikan.
Dapatkan persamaan diferensial dalam hal input dan output dengan menghilangkan variabel antara.
Contoh
Perhatikan sistem kelistrikan berikut seperti yang ditunjukkan pada gambar berikut. Rangkaian ini terdiri dari resistor, induktor dan kapasitor. Semua elemen listrik ini terhubungseries. Tegangan input yang diterapkan ke sirkuit ini adalah$v_i$ dan tegangan kapasitor adalah tegangan keluaran $v_o$.

Persamaan mesh untuk rangkaian ini adalah
$$v_i=Ri+L\frac{\text{d}i}{\text{d}t}+v_o$$
Pengganti, arus yang melewati kapasitor $i=c\frac{\text{d}v_o}{\text{d}t}$ dalam persamaan di atas.
$$\Rightarrow\:v_i=RC\frac{\text{d}v_o}{\text{d}t}+LC\frac{\text{d}^2v_o}{\text{d}t^2}+v_o$$
$$\Rightarrow\frac{\text{d}^2v_o}{\text{d}t^2}+\left ( \frac{R}{L} \right )\frac{\text{d}v_o}{\text{d}t}+\left ( \frac{1}{LC} \right )v_o=\left ( \frac{1}{LC} \right )v_i$$
Persamaan di atas adalah orde dua differential equation.
Model Fungsi Transfer
Model fungsi transfer adalah model matematis domain-s dari sistem kendali. ItuTransfer function Sistem Linear Time Invariant (LTI) didefinisikan sebagai rasio dari transformasi Laplace keluaran dan transformasi Laplace masukan dengan mengasumsikan semua kondisi awal adalah nol.
Jika $x(t)$ dan $y(t)$ adalah masukan dan keluaran dari sistem LTI, maka transformasi Laplace yang sesuai adalah $X(s)$ dan $Y(s)$.
Oleh karena itu, fungsi transfer sistem LTI sama dengan rasio $Y(s)$ dan $X(s)$.
$$i.e.,\: Transfer\: Function =\frac{Y(s)}{X(s)}$$
Model fungsi transfer dari suatu sistem LTI ditunjukkan pada gambar berikut.
Di sini, kami mewakili sistem LTI dengan blok yang memiliki fungsi transfer di dalamnya. Dan blok ini memiliki masukan$X(s)$ & keluaran $Y(s)$.
Contoh
Sebelumnya, kita mendapatkan persamaan diferensial dari suatu sistem kelistrikan sebagai
$$\frac{\text{d}^2v_o}{\text{d}t^2}+\left ( \frac{R}{L} \right )\frac{\text{d}v_o}{\text{d}t}+\left ( \frac{1}{LC} \right )v_o=\left ( \frac{1}{LC} \right )v_i$$
Terapkan transformasi Laplace di kedua sisi.
$$s^2V_o(s)+\left ( \frac{sR}{L} \right )V_o(s)+\left ( \frac{1}{LC} \right )V_o(s)=\left ( \frac{1}{LC} \right )V_i(s)$$
$$\Rightarrow \left \{ s^2+\left ( \frac{R}{L} \right )s+\frac{1}{LC} \right \}V_o(s)=\left ( \frac{1}{LC} \right )V_i(s)$$
$$\Rightarrow \frac{V_o(s)}{V_i(s)}=\frac{\frac{1}{LC}}{s^2+\left ( \frac{R}{L} \right )s+\frac{1}{LC}}$$
Dimana,
$v_i(s)$ adalah transformasi Laplace dari tegangan input $v_i$
$v_o(s)$ adalah transformasi Laplace dari tegangan keluaran $v_o$
Persamaan di atas adalah a transfer functiondari sistem kelistrikan orde dua. Model fungsi transfer dari sistem ini ditunjukkan di bawah ini.
Di sini, kami menunjukkan sistem kelistrikan orde dua dengan blok yang memiliki fungsi transfer di dalamnya. Dan blok ini memiliki masukan$V_i(s)$ & sebuah keluaran $V_o(s)$.
Dalam bab ini, mari kita bahas differential equation modelingsistem mekanis. Ada dua jenis sistem mekanik berdasarkan jenis geraknya.
- Sistem mekanis translasi
- Sistem mekanis rotasi
Pemodelan Sistem Mekanik Translasional
Sistem mekanis translasi bergerak sepanjang a straight line. Sistem ini terutama terdiri dari tiga elemen dasar. Yaitu massa, pegas dan dashpot atau damper.
Jika suatu gaya diterapkan pada sistem mekanik translasi, maka gaya tersebut dilawan oleh gaya lawan karena massa, elastisitas, dan gesekan sistem. Karena gaya yang diterapkan dan gaya yang berlawanan berada dalam arah yang berlawanan, jumlah aljabar gaya yang bekerja pada sistem adalah nol. Sekarang mari kita lihat gaya yang ditentang oleh ketiga elemen ini secara individual.
Massa
Massa adalah milik tubuh yang menyimpan kinetic energy. Jika gaya diterapkan pada benda bermassaM, kemudian dilawan oleh gaya lawan karena massa. Gaya yang berlawanan ini sebanding dengan percepatan benda. Asumsikan elastisitas dan gesekan dapat diabaikan.

$$F_m\propto\: a$$
$$\Rightarrow F_m=Ma=M\frac{\text{d}^2x}{\text{d}t^2}$$
$$F=F_m=M\frac{\text{d}^2x}{\text{d}t^2}$$
Dimana,
F adalah gaya yang diterapkan
Fm adalah gaya lawan karena massa
M adalah massa
a adalah percepatan
x adalah perpindahan
Musim semi
Musim semi adalah elemen yang menyimpan potential energy. Jika gaya diterapkan pada pegasK, kemudian dilawan oleh gaya berlawanan karena elastisitas pegas. Gaya yang berlawanan ini sebanding dengan perpindahan pegas. Asumsikan massa dan gesekan dapat diabaikan.

$$F\propto\: x$$
$$\Rightarrow F_k=Kx$$
$$F=F_k=Kx$$
Dimana,
F adalah gaya yang diterapkan
Fk adalah gaya berlawanan karena elastisitas pegas
K adalah konstanta pegas
x adalah perpindahan
Dashpot
Jika gaya diterapkan pada dashpot B, kemudian ditentang oleh kekuatan lawan karena frictiondari dashpot. Gaya yang berlawanan ini sebanding dengan kecepatan benda. Asumsikan massa dan elastisitas dapat diabaikan.

$$F_b\propto\: \nu$$
$$\Rightarrow F_b=B\nu=B\frac{\text{d}x}{\text{d}t}$$
$$F=F_b=B\frac{\text{d}x}{\text{d}t}$$
Dimana,
Fb adalah gaya yang berlawanan karena gesekan dari dashpot
B adalah koefisien gesekan
v adalah kecepatan
x adalah perpindahan
Pemodelan Sistem Mekanik Rotasi
Sistem mekanis rotasi bergerak pada sumbu tetap. Sistem ini terutama terdiri dari tiga elemen dasar. Yaitumoment of inertia, torsional spring dan dashpot.
Jika torsi diterapkan pada sistem mekanis rotasi, maka torsi tersebut akan berlawanan dengan torsi yang berlawanan karena momen inersia, elastisitas, dan gesekan sistem. Karena torsi yang diterapkan dan torsi yang berlawanan berada pada arah yang berlawanan, jumlah aljabar torsi yang bekerja pada sistem adalah nol. Sekarang mari kita lihat torsi yang ditentang oleh ketiga elemen ini secara individual.
Momen inersia
Dalam sistem mekanik translasi, massa menyimpan energi kinetik. Demikian pula, dalam sistem mekanik rotasi, penyimpanan momen inersiakinetic energy.
Jika torsi diterapkan pada benda yang mengalami momen inersia J, kemudian dilawan oleh torsi berlawanan karena momen inersia. Torsi yang berlawanan ini sebanding dengan percepatan sudut tubuh. Asumsikan elastisitas dan gesekan dapat diabaikan.

$$T_j\propto\: \alpha$$
$$\Rightarrow T_j=J\alpha=J\frac{\text{d}^2\theta}{\text{d}t^2}$$
$$T=T_j=J\frac{\text{d}^2\theta}{\text{d}t^2}$$
Dimana,
T adalah torsi yang diterapkan
Tj adalah torsi lawan karena momen inersia
J adalah momen inersia
α adalah percepatan sudut
θ adalah perpindahan sudut
Musim Semi Torsional
Dalam sistem mekanik translasi, pegas menyimpan energi potensial. Demikian pula, dalam sistem mekanik rotasi, pegas torsi menyimpanpotential energy.
Jika torsi diterapkan pada pegas torsi K, kemudian dilawan oleh torsi yang berlawanan karena elastisitas pegas torsi. Torsi yang berlawanan ini sebanding dengan perpindahan sudut pegas torsi. Asumsikan bahwa momen inersia dan gesekan dapat diabaikan.
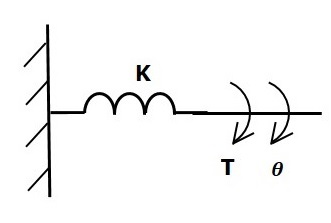
$$T_k\propto\: \theta$$
$$\Rightarrow T_k=K\theta$$
$$T=T_k=K\theta$$
Where,
T is the applied torque
Tk is the opposing torque due to elasticity of torsional spring
K is the torsional spring constant
θ is angular displacement
Dashpot
If a torque is applied on dashpot B, then it is opposed by an opposing torque due to the rotational friction of the dashpot. This opposing torque is proportional to the angular velocity of the body. Assume the moment of inertia and elasticity are negligible.
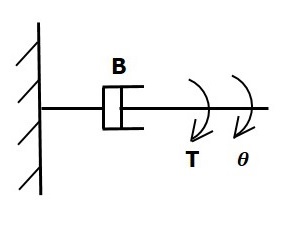
$$T_b\propto\: \omega$$
$$\Rightarrow T_b=B\omega=B\frac{\text{d}\theta}{\text{d}t}$$
$$T=T_b=B\frac{\text{d}\theta}{\text{d}t}$$
Where,
Tb is the opposing torque due to the rotational friction of the dashpot
B is the rotational friction coefficient
ω is the angular velocity
θ is the angular displacement
Two systems are said to be analogous to each other if the following two conditions are satisfied.
- The two systems are physically different
- Differential equation modelling of these two systems are same
Electrical systems and mechanical systems are two physically different systems. There are two types of electrical analogies of translational mechanical systems. Those are force voltage analogy and force current analogy.
Force Voltage Analogy
In force voltage analogy, the mathematical equations of translational mechanical system are compared with mesh equations of the electrical system.
Consider the following translational mechanical system as shown in the following figure.
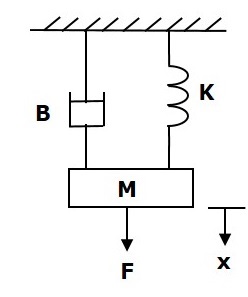
The force balanced equation for this system is
$$F=F_m+F_b+F_k$$
$\Rightarrow F=M\frac{\text{d}^2x}{\text{d}t^2}+B\frac{\text{d}x}{\text{d}t}+Kx$ (Equation 1)
Consider the following electrical system as shown in the following figure. This circuit consists of a resistor, an inductor and a capacitor. All these electrical elements are connected in a series. The input voltage applied to this circuit is $V$ volts and the current flowing through the circuit is $i$ Amps.

Mesh equation for this circuit is
$V=Ri+L\frac{\text{d}i}{\text{d}t}+\frac{1}{c}\int idt$ (Equation 2)
Substitute, $i=\frac{\text{d}q}{\text{d}t}$ in Equation 2.
$$V=R\frac{\text{d}q}{\text{d}t}+L\frac{\text{d}^2q}{\text{d}t^2}+\frac{q}{C}$$
$\Rightarrow V=L\frac{\text{d}^2q}{\text{d}t^2}+R\frac{\text{d}q}{\text{d}t}+\left ( \frac{1}{c} \right )q$ (Equation 3)
By comparing Equation 1 and Equation 3, we will get the analogous quantities of the translational mechanical system and electrical system. The following table shows these analogous quantities.
| Translational Mechanical System | Electrical System |
|---|---|
| Force(F) | Voltage(V) |
| Mass(M) | Inductance(L) |
| Frictional Coefficient(B) | Resistance(R) |
| Spring Constant(K) | Reciprocal of Capacitance $(\frac{1}{c})$ |
| Displacement(x) | Charge(q) |
| Velocity(v) | Current(i) |
Similarly, there is torque voltage analogy for rotational mechanical systems. Let us now discuss about this analogy.
Torque Voltage Analogy
In this analogy, the mathematical equations of rotational mechanical system are compared with mesh equations of the electrical system.
Rotational mechanical system is shown in the following figure.

The torque balanced equation is
$$T=T_j+T_b+T_k$$
$\Rightarrow T=J\frac{\text{d}^2\theta}{\text{d}t^2}+B\frac{\text{d}\theta}{\text{d}t}+k\theta$ (Equation 4)
By comparing Equation 4 and Equation 3, we will get the analogous quantities of rotational mechanical system and electrical system. The following table shows these analogous quantities.
| Rotational Mechanical System | Electrical System |
|---|---|
| Torque(T) | Voltage(V) |
| Moment of Inertia(J) | Inductance(L) |
| Rotational friction coefficient(B) | Resistance(R) |
| Torsional spring constant(K) | Reciprocal of Capacitance $(\frac{1}{c})$ |
| Angular Displacement(θ) | Charge(q) |
| Angular Velocity(ω) | Current(i) |
Force Current Analogy
In force current analogy, the mathematical equations of the translational mechanical system are compared with the nodal equations of the electrical system.
Consider the following electrical system as shown in the following figure. This circuit consists of current source, resistor, inductor and capacitor. All these electrical elements are connected in parallel.

The nodal equation is
$i=\frac{V}{R}+\frac{1}{L}\int Vdt+C\frac{\text{d}V}{\text{d}t}$ (Equation 5)
Substitute, $V=\frac{\text{d}\Psi}{\text{d}t}$ in Equation 5.
$$i=\frac{1}{R}\frac{\text{d}\Psi}{\text{d}t}+\left ( \frac{1}{L} \right )\Psi+C\frac{\text{d}^2\Psi}{\text{d}t^2}$$
$\Rightarrow i=C\frac{\text{d}^2\Psi}{\text{d}t^2}+\left ( \frac{1}{R} \right )\frac{\text{d}\Psi}{\text{d}t}+\left ( \frac{1}{L} \right )\Psi$ (Equation 6)
By comparing Equation 1 and Equation 6, we will get the analogous quantities of the translational mechanical system and electrical system. The following table shows these analogous quantities.
| Translational Mechanical System | Electrical System |
|---|---|
| Force(F) | Current(i) |
| Mass(M) | Capacitance(C) |
| Frictional coefficient(B) | Reciprocal of Resistance$(\frac{1}{R})$ |
| Spring constant(K) | Reciprocal of Inductance$(\frac{1}{L})$ |
| Displacement(x) | Magnetic Flux(ψ) |
| Velocity(v) | Voltage(V) |
Similarly, there is a torque current analogy for rotational mechanical systems. Let us now discuss this analogy.
Torque Current Analogy
In this analogy, the mathematical equations of the rotational mechanical system are compared with the nodal mesh equations of the electrical system.
By comparing Equation 4 and Equation 6, we will get the analogous quantities of rotational mechanical system and electrical system. The following table shows these analogous quantities.
| Rotational Mechanical System | Electrical System |
|---|---|
| Torque(T) | Current(i) |
| Moment of inertia(J) | Capacitance(C) |
| Rotational friction coefficient(B) | Reciprocal of Resistance$(\frac{1}{R})$ |
| Torsional spring constant(K) | Reciprocal of Inductance$(\frac{1}{L})$ |
| Angular displacement(θ) | Magnetic flux(ψ) |
| Angular velocity(ω) | Voltage(V) |
In this chapter, we discussed the electrical analogies of the mechanical systems. These analogies are helpful to study and analyze the non-electrical system like mechanical system from analogous electrical system.
Block diagrams consist of a single block or a combination of blocks. These are used to represent the control systems in pictorial form.
Basic Elements of Block Diagram
The basic elements of a block diagram are a block, the summing point and the take-off point. Let us consider the block diagram of a closed loop control system as shown in the following figure to identify these elements.

The above block diagram consists of two blocks having transfer functions G(s) and H(s). It is also having one summing point and one take-off point. Arrows indicate the direction of the flow of signals. Let us now discuss these elements one by one.
Block
The transfer function of a component is represented by a block. Block has single input and single output.
The following figure shows a block having input X(s), output Y(s) and the transfer function G(s).

Transfer Function,$G(s)=\frac{Y(s)}{X(s)}$
$$\Rightarrow Y(s)=G(s)X(s)$$
Output of the block is obtained by multiplying transfer function of the block with input.
Summing Point
The summing point is represented with a circle having cross (X) inside it. It has two or more inputs and single output. It produces the algebraic sum of the inputs. It also performs the summation or subtraction or combination of summation and subtraction of the inputs based on the polarity of the inputs. Let us see these three operations one by one.
The following figure shows the summing point with two inputs (A, B) and one output (Y). Here, the inputs A and B have a positive sign. So, the summing point produces the output, Y as sum of A and B.
i.e.,Y = A + B.

The following figure shows the summing point with two inputs (A, B) and one output (Y). Here, the inputs A and B are having opposite signs, i.e., A is having positive sign and B is having negative sign. So, the summing point produces the output Y as the difference of A and B.
Y = A + (-B) = A - B.

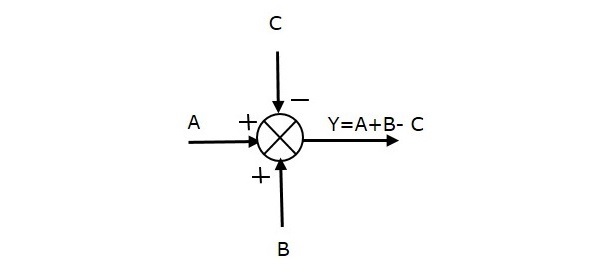
The following figure shows the summing point with three inputs (A, B, C) and one output (Y). Here, the inputs A and B are having positive signs and C is having a negative sign. So, the summing point produces the output Y as
Y = A + B + (−C) = A + B − C.
Take-off Point
The take-off point is a point from which the same input signal can be passed through more than one branch. That means with the help of take-off point, we can apply the same input to one or more blocks, summing points.
In the following figure, the take-off point is used to connect the same input, R(s) to two more blocks.

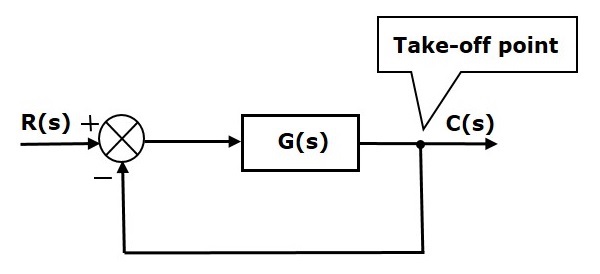
In the following figure, the take-off point is used to connect the output C(s), as one of the inputs to the summing point.
Block Diagram Representation of Electrical Systems
In this section, let us represent an electrical system with a block diagram. Electrical systems contain mainly three basic elements — resistor, inductor and capacitor.
Consider a series of RLC circuit as shown in the following figure. Where, Vi(t) and Vo(t) are the input and output voltages. Let i(t) be the current passing through the circuit. This circuit is in time domain.

By applying the Laplace transform to this circuit, will get the circuit in s-domain. The circuit is as shown in the following figure.
From the above circuit, we can write
$$I(s)=\frac{V_i(s)-V_o(s)}{R+sL}$$
$\Rightarrow I(s)=\left \{ \frac{1}{R+sL} \right \}\left \{ V_i(s)-V_o(s) \right \}$ (Equation 1)
$V_o(s)=\left ( \frac{1}{sC} \right )I(s)$ (Equation 2)
Let us now draw the block diagrams for these two equations individually. And then combine those block diagrams properly in order to get the overall block diagram of series of RLC Circuit (s-domain).
Equation 1 can be implemented with a block having the transfer function, $\frac{1}{R+sL}$. The input and output of this block are $\left \{ V_i(s)-V_o(s) \right \}$ and $I(s)$. We require a summing point to get $\left \{ V_i(s)-V_o(s) \right \}$. The block diagram of Equation 1 is shown in the following figure.

Equation 2 can be implemented with a block having transfer function, $\frac{1}{sC}$. The input and output of this block are $I(s)$ and $V_o(s)$. The block diagram of Equation 2 is shown in the following figure.

The overall block diagram of the series of RLC Circuit (s-domain) is shown in the following figure.

Similarly, you can draw the block diagram of any electrical circuit or system just by following this simple procedure.
Convert the time domain electrical circuit into an s-domain electrical circuit by applying Laplace transform.
Write down the equations for the current passing through all series branch elements and voltage across all shunt branches.
Draw the block diagrams for all the above equations individually.
Combine all these block diagrams properly in order to get the overall block diagram of the electrical circuit (s-domain).
Block diagram algebra is nothing but the algebra involved with the basic elements of the block diagram. This algebra deals with the pictorial representation of algebraic equations.
Basic Connections for Blocks
There are three basic types of connections between two blocks.
Series Connection
Series connection is also called cascade connection. In the following figure, two blocks having transfer functions $G_1(s)$ and $G_2(s)$ are connected in series.

For this combination, we will get the output $Y(s)$ as
$$Y(s)=G_2(s)Z(s)$$
Where, $Z(s)=G_1(s)X(s)$
$$\Rightarrow Y(s)=G_2(s)[G_1(s)X(s)]=G_1(s)G_2(s)X(s)$$
$$\Rightarrow Y(s)=\lbrace G_1(s)G_2(s)\rbrace X(s)$$
Compare this equation with the standard form of the output equation, $Y(s)=G(s)X(s)$. Where, $G(s) = G_1(s)G_2(s)$.
That means we can represent the series connection of two blocks with a single block. The transfer function of this single block is the product of the transfer functions of those two blocks. The equivalent block diagram is shown below.

Similarly, you can represent series connection of ‘n’ blocks with a single block. The transfer function of this single block is the product of the transfer functions of all those ‘n’ blocks.
Parallel Connection
The blocks which are connected in parallel will have the same input. In the following figure, two blocks having transfer functions $G_1(s)$ and $G_2(s)$ are connected in parallel. The outputs of these two blocks are connected to the summing point.

For this combination, we will get the output $Y(s)$ as
$$Y(s)=Y_1(s)+Y_2(s)$$
Where, $Y_1(s)=G_1(s)X(s)$ and $Y_2(s)=G_2(s)X(s)$
$$\Rightarrow Y(s)=G_1(s)X(s)+G_2(s)X(s)=\lbrace G_1(s)+G_2(s)\rbrace X(s)$$
Compare this equation with the standard form of the output equation, $Y(s)=G(s)X(s)$.
Where, $G(s)=G_1(s)+G_2(s)$.
That means we can represent the parallel connection of two blocks with a single block. The transfer function of this single block is the sum of the transfer functions of those two blocks. The equivalent block diagram is shown below.

Similarly, you can represent parallel connection of ‘n’ blocks with a single block. The transfer function of this single block is the algebraic sum of the transfer functions of all those ‘n’ blocks.
Feedback Connection
As we discussed in previous chapters, there are two types of feedback — positive feedback and negative feedback. The following figure shows negative feedback control system. Here, two blocks having transfer functions $G(s)$ and $H(s)$ form a closed loop.

The output of the summing point is -
$$E(s)=X(s)-H(s)Y(s)$$
The output $Y(s)$ is -
$$Y(s)=E(s)G(s)$$
Substitute $E(s)$ value in the above equation.
$$Y(s)=\left \{ X(s)-H(s)Y(s)\rbrace G(s) \right\}$$
$$Y(s)\left \{ 1+G(s)H(s)\rbrace = X(s)G(s) \right\}$$
$$\Rightarrow \frac{Y(s)}{X(s)}=\frac{G(s)}{1+G(s)H(s)}$$
Therefore, the negative feedback closed loop transfer function is $\frac{G(s)}{1+G(s)H(s)}$
This means we can represent the negative feedback connection of two blocks with a single block. The transfer function of this single block is the closed loop transfer function of the negative feedback. The equivalent block diagram is shown below.

Similarly, you can represent the positive feedback connection of two blocks with a single block. The transfer function of this single block is the closed loop transfer function of the positive feedback, i.e., $\frac{G(s)}{1-G(s)H(s)}$
Block Diagram Algebra for Summing Points
There are two possibilities of shifting summing points with respect to blocks −
- Shifting summing point after the block
- Shifting summing point before the block
Let us now see what kind of arrangements need to be done in the above two cases one by one.
Shifting Summing Point After the Block
Consider the block diagram shown in the following figure. Here, the summing point is present before the block.

Summing point has two inputs $R(s)$ and $X(s)$. The output of it is $\left \{R(s)+X(s)\right\}$.
So, the input to the block $G(s)$ is $\left \{R(s)+X(s)\right \}$ and the output of it is –
$$Y(s)=G(s)\left \{R(s)+X(s)\right \}$$
$\Rightarrow Y(s)=G(s)R(s)+G(s)X(s)$ (Equation 1)
Now, shift the summing point after the block. This block diagram is shown in the following figure.

Output of the block $G(s)$ is $G(s)R(s)$.
The output of the summing point is
$Y(s)=G(s)R(s)+X(s)$ (Equation 2)
Compare Equation 1 and Equation 2.
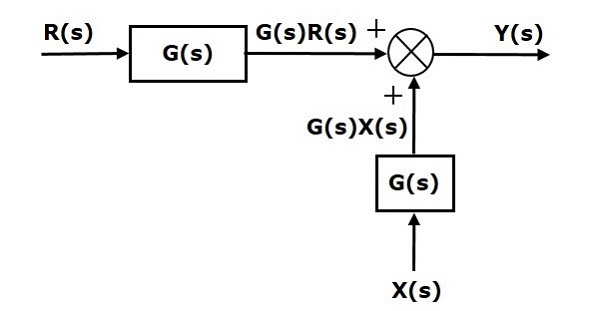
The first term $‘G(s) R(s)’$ is same in both the equations. But, there is difference in the second term. In order to get the second term also same, we require one more block $G(s)$. It is having the input $X(s)$ and the output of this block is given as input to summing point instead of $X(s)$. This block diagram is shown in the following figure.
Shifting Summing Point Before the Block
Consider the block diagram shown in the following figure. Here, the summing point is present after the block.
Output of this block diagram is -
$Y(s)=G(s)R(s)+X(s)$ (Equation 3)
Now, shift the summing point before the block. This block diagram is shown in the following figure.
Output of this block diagram is -
$Y(S)=G(s)R(s)+G(s)X(s)$ (Equation 4)
Compare Equation 3 and Equation 4,
The first term $‘G(s) R(s)’$ is same in both equations. But, there is difference in the second term. In order to get the second term also same, we require one more block $\frac{1}{G(s)}$. It is having the input $X(s)$ and the output of this block is given as input to summing point instead of $X(s)$. This block diagram is shown in the following figure.

Block Diagram Algebra for Take-off Points
There are two possibilities of shifting the take-off points with respect to blocks −
- Shifting take-off point after the block
- Shifting take-off point before the block
Let us now see what kind of arrangements are to be done in the above two cases, one by one.
Shifting Take-off Point After the Block
Consider the block diagram shown in the following figure. In this case, the take-off point is present before the block.

Here, $X(s)=R(s)$ and $Y(s)=G(s)R(s)$
When you shift the take-off point after the block, the output $Y(s)$ will be same. But, there is difference in $X(s)$ value. So, in order to get the same $X(s)$ value, we require one more block $\frac{1}{G(s)}$. It is having the input $Y(s)$ and the output is $X(s)$. This block diagram is shown in the following figure.

Shifting Take-off Point Before the Block
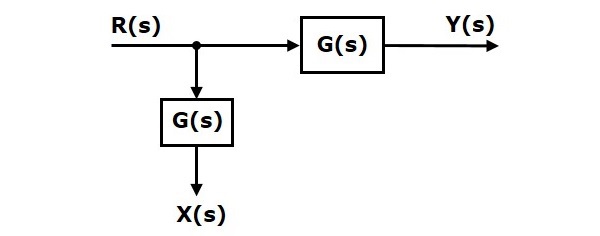
Consider the block diagram shown in the following figure. Here, the take-off point is present after the block.

Here, $X(s)=Y(s)=G(s)R(s)$
When you shift the take-off point before the block, the output $Y(s)$ will be same. But, there is difference in $X(s)$ value. So, in order to get same $X(s)$ value, we require one more block $G(s)$. It is having the input $R(s)$ and the output is $X(s)$. This block diagram is shown in the following figure.
The concepts discussed in the previous chapter are helpful for reducing (simplifying) the block diagrams.
Block Diagram Reduction Rules
Follow these rules for simplifying (reducing) the block diagram, which is having many blocks, summing points and take-off points.
Rule 1 − Check for the blocks connected in series and simplify.
Rule 2 − Check for the blocks connected in parallel and simplify.
Rule 3 − Check for the blocks connected in feedback loop and simplify.
Rule 4 − If there is difficulty with take-off point while simplifying, shift it towards right.
Rule 5 − If there is difficulty with summing point while simplifying, shift it towards left.
Rule 6 − Repeat the above steps till you get the simplified form, i.e., single block.
Note − The transfer function present in this single block is the transfer function of the overall block diagram.
Example
Consider the block diagram shown in the following figure. Let us simplify (reduce) this block diagram using the block diagram reduction rules.

Step 1 − Use Rule 1 for blocks $G_1$ and $G_2$. Use Rule 2 for blocks $G_3$ and $G_4$. The modified block diagram is shown in the following figure.

Step 2 − Use Rule 3 for blocks $G_1G_2$ and $H_1$. Use Rule 4 for shifting take-off point after the block $G_5$. The modified block diagram is shown in the following figure.

Step 3 − Use Rule 1 for blocks $(G_3 + G_4)$ and $G_5$. The modified block diagram is shown in the following figure.

Step 4 − Use Rule 3 for blocks $(G_3 + G_4)G_5$ and $H_3$. The modified block diagram is shown in the following figure.

Step 5 − Use Rule 1 for blocks connected in series. The modified block diagram is shown in the following figure.

Step 6 − Use Rule 3 for blocks connected in feedback loop. The modified block diagram is shown in the following figure. This is the simplified block diagram.
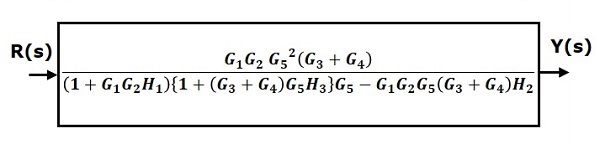
Therefore, the transfer function of the system is
$$\frac{Y(s)}{R(s)}=\frac{G_1G_2G_5^2(G_3+G_4)}{(1+G_1G_2H_1)\lbrace 1+(G_3+G_4)G_5H_3\rbrace G_5-G_1G_2G_5(G_3+G_4)H_2}$$
Note − Follow these steps in order to calculate the transfer function of the block diagram having multiple inputs.
Step 1 − Find the transfer function of block diagram by considering one input at a time and make the remaining inputs as zero.
Step 2 − Repeat step 1 for remaining inputs.
Step 3 − Get the overall transfer function by adding all those transfer functions.
The block diagram reduction process takes more time for complicated systems. Because, we have to draw the (partially simplified) block diagram after each step. So, to overcome this drawback, use signal flow graphs (representation).
In the next two chapters, we will discuss about the concepts related to signal flow graphs, i.e., how to represent signal flow graph from a given block diagram and calculation of transfer function just by using a gain formula without doing any reduction process.
Signal flow graph is a graphical representation of algebraic equations. In this chapter, let us discuss the basic concepts related signal flow graph and also learn how to draw signal flow graphs.
Basic Elements of Signal Flow Graph
Nodes and branches are the basic elements of signal flow graph.
Node
Node is a point which represents either a variable or a signal. There are three types of nodes — input node, output node and mixed node.
Input Node − It is a node, which has only outgoing branches.
Output Node − It is a node, which has only incoming branches.
Mixed Node − It is a node, which has both incoming and outgoing branches.
Example
Let us consider the following signal flow graph to identify these nodes.

The nodes present in this signal flow graph are y1, y2, y3 and y4.
y1 and y4 are the input node and output node respectively.
y2 and y3 are mixed nodes.
Branch
Branch is a line segment which joins two nodes. It has both gain and direction. For example, there are four branches in the above signal flow graph. These branches have gains of a, b, c and -d.
Construction of Signal Flow Graph
Let us construct a signal flow graph by considering the following algebraic equations −
$$y_2=a_{12}y_1+a_{42}y_4$$
$$y_3=a_{23}y_2+a_{53}y_5$$
$$y_4=a_{34}y_3$$
$$y_5=a_{45}y_4+a_{35}y_3$$
$$y_6=a_{56}y_5$$
There will be six nodes (y1, y2, y3, y4, y5 and y6) and eight branches in this signal flow graph. The gains of the branches are a12, a23, a34, a45, a56, a42, a53 and a35.
To get the overall signal flow graph, draw the signal flow graph for each equation, then combine all these signal flow graphs and then follow the steps given below −
Step 1 − Signal flow graph for $y_2 = a_{13}y_1 + a_{42}y_4$ is shown in the following figure.

Step 2 − Signal flow graph for $y_3 = a_{23}y_2 + a_{53}y_5$ is shown in the following figure.

Step 3 − Signal flow graph for $y_4 = a_{34}y_3$ is shown in the following figure.

Step 4 − Signal flow graph for $y_5 = a_{45}y_4 + a_{35}y_3$ is shown in the following figure.

Step 5 − Signal flow graph for $y_6 = a_{56}y_5$ is shown in the following figure.

Step 6 − Signal flow graph of overall system is shown in the following figure.

Conversion of Block Diagrams into Signal Flow Graphs
Follow these steps for converting a block diagram into its equivalent signal flow graph.
Represent all the signals, variables, summing points and take-off points of block diagram as nodes in signal flow graph.
Represent the blocks of block diagram as branches in signal flow graph.
Represent the transfer functions inside the blocks of block diagram as gains of the branches in signal flow graph.
Connect the nodes as per the block diagram. If there is connection between two nodes (but there is no block in between), then represent the gain of the branch as one. For example, between summing points, between summing point and takeoff point, between input and summing point, between take-off point and output.
Contoh
Mari kita ubah diagram blok berikut menjadi grafik aliran sinyal ekuivalennya.

Mewakili sinyal input $R(s)$ dan sinyal keluaran $C(s)$ diagram blok sebagai simpul masukan $R(s)$ dan simpul keluaran $C(s)$ grafik aliran sinyal.
Hanya untuk referensi, node yang tersisa (y 1 sampai y 9 ) diberi label dalam diagram blok. Ada sembilan node selain node input dan output. Yaitu empat titik untuk empat titik penjumlahan, empat titik untuk empat titik lepas landas dan satu simpul untuk variabel antar blok$G_1$ dan $G_2$.
Gambar berikut menunjukkan grafik aliran sinyal ekivalen.

Dengan bantuan rumus penguatan Mason (dibahas dalam bab berikutnya), Anda dapat menghitung fungsi transfer grafik aliran sinyal ini. Inilah keuntungan dari grafik aliran sinyal. Di sini, kita tidak perlu menyederhanakan (mengurangi) grafik aliran sinyal untuk menghitung fungsi transfer.
Mari kita sekarang membahas Rumus Keuntungan Mason. Misalkan ada jalur maju 'N' dalam grafik aliran sinyal. Keuntungan antara node input dan output dari grafik aliran sinyal tidak lain adalahtransfer functiondari sistem. Ini dapat dihitung dengan menggunakan rumus keuntungan Mason.
Mason’s gain formula is
$$T=\frac{C(s)}{R(s)}=\frac{\Sigma ^N _{i=1}P_i\Delta _i}{\Delta}$$
Dimana,
C(s) adalah simpul keluaran
R(s) adalah simpul masukan
T adalah fungsi transfer atau keuntungan antara $R(s)$ dan $C(s)$
Piadalah keuntungan jalur maju ke- i
$\Delta =1-(sum \: of \: all \: individual \: loop \: gains)$
$+(sum \: of \: gain \: products \: of \: all \: possible \: two \:nontouching \: loops)$
$$-(sum \: of \: gain \: products \: of \: all \: possible \: three \: nontouching \: loops)+...$$
Δ i diperoleh dari Δ dengan menghilangkan loop yang menyentuh jalur maju ke- i .
Pertimbangkan grafik aliran sinyal berikut untuk memahami terminologi dasar yang terlibat di sini.

Jalan
Ini adalah traversal cabang dari satu node ke node lain ke arah panah cabang. Seharusnya tidak melintasi node lebih dari sekali.
Examples - $y_2 \rightarrow y_3 \rightarrow y_4 \rightarrow y_5$ dan $y_5 \rightarrow y_3 \rightarrow y_2$
Jalur Maju
Jalur yang ada dari simpul masukan ke simpul keluaran dikenal sebagai forward path.
Examples - $y_1 \rightarrow y_2 \rightarrow y_3 \rightarrow y_4 \rightarrow y_5 \rightarrow y_6$ dan $y_1 \rightarrow y_2 \rightarrow y_3 \rightarrow y_5 \rightarrow y_6$.
Keuntungan Jalur Maju
Ini diperoleh dengan menghitung produk dari semua keuntungan cabang dari jalur maju.
Examples - $abcde$ adalah keuntungan jalur maju $y_1 \rightarrow y_2 \rightarrow y_3 \rightarrow y_4 \rightarrow y_5 \rightarrow y_6$ dan abge adalah keuntungan jalur maju $y_1 \rightarrow y_2 \rightarrow y_3 \rightarrow y_5 \rightarrow y_6$.
Loop
Jalur yang dimulai dari satu node dan berakhir di node yang sama disebut loop. Karenanya, ini adalah jalur tertutup.
Examples - $y_2 \rightarrow y_3 \rightarrow y_2$ dan $y_3 \rightarrow y_5 \rightarrow y_3$.
Penguatan Loop
Ini diperoleh dengan menghitung produk dari semua keuntungan cabang dari sebuah loop.
Examples - $b_j$ adalah gain loop dari $y_2 \rightarrow y_3 \rightarrow y_2$ dan $g_h$ adalah gain loop dari $y_3 \rightarrow y_5 \rightarrow y_3$.
Loop yang tidak menyentuh
Ini adalah loop, yang seharusnya tidak memiliki simpul yang sama.
Examples - Lingkaran, $y_2 \rightarrow y_3 \rightarrow y_2$ dan $y_4 \rightarrow y_5 \rightarrow y_4$ tidak menyentuh.
Perhitungan Fungsi Transfer menggunakan Rumus Gain Mason
Mari kita pertimbangkan grafik aliran sinyal yang sama untuk menemukan fungsi transfer.
Jumlah jalur maju, N = 2.
Jalur maju pertama adalah - $y_1 \rightarrow y_2 \rightarrow y_3 \rightarrow y_4 \rightarrow y_5 \rightarrow y_6$.
Keuntungan jalur maju pertama, $p_1 = abcde$.
Jalur maju kedua adalah - $y_1 \rightarrow y_2 \rightarrow y_3 \rightarrow y_5 \rightarrow y_6$.
Keuntungan jalur maju kedua, $p_2 = abge$.
Jumlah loop individu, L = 5.
Loop adalah - $y_2 \rightarrow y_3 \rightarrow y_2$, $y_3 \rightarrow y_5 \rightarrow y_3$, $y_3 \rightarrow y_4 \rightarrow y_5 \rightarrow y_3$, $y_4 \rightarrow y_5 \rightarrow y_4$ dan $y_5 \rightarrow y_5$.
Keuntungan loop adalah - $l_1 = bj$, $l_2 = gh$, $l_3 = cdh$, $l_4 = di$ dan $l_5 = f$.
Jumlah dua loop tidak bersentuhan = 2.
Pasangan loop non-sentuh pertama adalah - $y_2 \rightarrow y_3 \rightarrow y_2$, $y_4 \rightarrow y_5 \rightarrow y_4$.
Dapatkan produk dari pasangan loop non-sentuh pertama, $l_1l_4 = bjdi$
Pasangan loop non-sentuh kedua adalah - $y_2 \rightarrow y_3 \rightarrow y_2$, $y_5 \rightarrow y_5$.
Hasil perkalian dari pasangan loop non-sentuh kedua adalah - $l_1l_5 = bjf$
Jumlah yang lebih tinggi dari (lebih dari dua) loop non-sentuh tidak ada dalam grafik aliran sinyal ini.
Kita tahu,
$\Delta =1-(sum \: of \: all \: individual \: loop \: gains)$
$+(sum \: of \: gain \: products \: of \: all \: possible \: two \:nontouching \: loops)$
$$-(sum \: of \: gain \: products \: of \: all \: possible \: three \: nontouching \: loops)+...$$
Gantikan nilai dalam persamaan di atas,
$\Delta =1-(bj+gh+cdh+di+f)+(bjdi+bjf)-(0)$
$\Rightarrow \Delta=1-(bj+gh+cdh+di+f)+bjdi+bjf$
Tidak ada putaran yang tidak menyentuh jalur maju pertama.
Begitu, $\Delta_1=1$.
Demikian pula, $\Delta_2=1$. Karena, tidak ada loop yang tidak menyentuh jalur maju kedua.
Gantikan, N = 2 dalam rumus perolehan Mason
$$T=\frac{C(s)}{R(s)}=\frac{\Sigma ^2 _{i=1}P_i\Delta _i}{\Delta}$$
$$T=\frac{C(s)}{R(s)}=\frac{P_1\Delta_1+P_2\Delta_2}{\Delta}$$
Gantikan semua nilai yang diperlukan dalam persamaan di atas.
$$T=\frac{C(s)}{R(s)}=\frac{(abcde)1+(abge)1}{1-(bj+gh+cdh+di+f)+bjdi+bjf}$$
$$\Rightarrow T=\frac{C(s)}{R(s)}=\frac{(abcde)+(abge)}{1-(bj+gh+cdh+di+f)+bjdi+bjf}$$
Oleh karena itu, fungsi transfernya adalah -
$$T=\frac{C(s)}{R(s)}=\frac{(abcde)+(abge)}{1-(bj+gh+cdh+di+f)+bjdi+bjf}$$
Kita dapat menganalisis respon sistem kontrol baik dalam domain waktu maupun domain frekuensi. Kami akan membahas analisis respons frekuensi sistem kontrol di bab-bab selanjutnya. Sekarang mari kita bahas tentang analisis respon waktu sistem kontrol.
Apa itu Respon Waktu?
Jika keluaran dari sistem kendali untuk suatu masukan bervariasi terhadap waktu, maka itu disebut time responsedari sistem kontrol. Respon waktu terdiri dari dua bagian.
- Respon sementara
- Respons kondisi mapan
Respon sistem kendali dalam domain waktu ditunjukkan pada gambar berikut.

Di sini, baik kondisi transien dan mapan ditunjukkan pada gambar. Respons yang sesuai dengan status ini dikenal sebagai respons kondisi sementara dan tunak.
Secara matematis, kita dapat menuliskan respon waktu c (t) sebagai
$$c(t)=c_{tr}(t)+c_{ss}(t)$$
Dimana,
- c tr (t) adalah respon transien
- c ss (t) adalah respons kondisi tunak
Respon sementara
Setelah menerapkan masukan ke sistem kontrol, keluaran membutuhkan waktu tertentu untuk mencapai kondisi tunak. Jadi, output akan berada dalam kondisi transien hingga mencapai kondisi mapan. Oleh karena itu, respons sistem kontrol selama keadaan transien dikenal sebagaitransient response.
Respon transien akan menjadi nol untuk nilai besar 't'. Idealnya, nilai 't' ini tak terhingga dan secara praktis lima kali konstan.
Secara matematis, kita bisa menulisnya sebagai
$$\lim_{t\rightarrow \infty }c_{tr}(t)=0$$
Respon Stabil
Bagian dari respon waktu yang tersisa bahkan setelah respon transien memiliki nilai nol untuk nilai besar 't' yang dikenal sebagai steady state response. Artinya, respons transien akan menjadi nol bahkan selama kondisi tunak.
Example
Mari kita temukan istilah keadaan transien dan tunak dari respons waktu sistem kontrol $c(t)=10+5e^{-t}$
Di sini, istilah kedua $5e^{-t}$ akan menjadi nol sebagai tmenunjukkan tak terhingga. Jadi, initransient term. Dan 10 suku pertama tetap samatmendekati tak terbatas. Jadi, inisteady state term.
Sinyal Uji Standar
Sinyal uji standar adalah impuls, langkah, jalan, dan parabola. Sinyal-sinyal ini digunakan untuk mengetahui kinerja sistem kendali dengan menggunakan respon waktu dari keluaran.
Sinyal Impuls Unit
Sinyal impuls unit, δ (t) didefinisikan sebagai
$\delta (t)=0$ untuk $t\neq 0$
dan $\int_{0^-}^{0^+} \delta (t)dt=1$
Gambar berikut menunjukkan sinyal impuls unit.

Jadi, sinyal impuls satuan yang hanya ada pada 't' sama dengan nol. Area sinyal ini di bawah interval waktu kecil sekitar 't' sama dengan nol adalah satu. Nilai sinyal impuls unit adalah nol untuk semua nilai 't' lainnya.
Sinyal Langkah Satuan
Sinyal langkah satuan, u (t) didefinisikan sebagai
$$u(t)=1;t\geq 0$$
$=0; t<0$
Gambar berikut menunjukkan sinyal langkah unit.

Jadi, sinyal langkah satuan ada untuk semua nilai positif dari 't' termasuk nol. Dan nilainya satu selama interval ini. Nilai sinyal langkah satuan adalah nol untuk semua nilai negatif dari 't'.
Sinyal Ramp Unit
Sinyal ramp unit, r (t) didefinisikan sebagai
$$r(t)=t; t\geq 0$$
$=0; t<0$
Kita dapat menulis sinyal ramp unit, $r(t)$ dalam hal sinyal langkah satuan, $u(t)$ sebagai
$$r(t)=tu(t)$$
Gambar berikut menunjukkan sinyal ramp unit.

Jadi, sinyal ramp unit ada untuk semua nilai positif 't' termasuk nol. Dan nilainya meningkat secara linier sehubungan dengan 't' selama interval ini. Nilai sinyal ramp unit adalah nol untuk semua nilai negatif dari 't'.
Sinyal Parabola Unit
Sebuah sinyal parabola unit, p (t) didefinisikan sebagai,
$$p(t)=\frac{t^2}{2}; t\geq 0$$
$=0; t<0$
Kita dapat menulis sinyal parabola satuan, $p(t)$ dalam hal sinyal langkah satuan, $u(t)$ sebagai,
$$p(t)=\frac{t^2}{2}u(t)$$
Gambar berikut menunjukkan sinyal parabola unit.
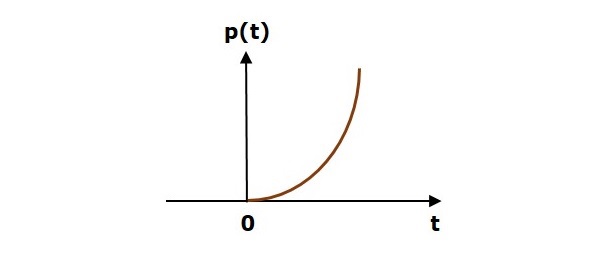
Jadi, sinyal parabola unit ada untuk semua nilai positif ‘t’termasuk nol. Dan nilainya meningkat secara non-linier sehubungan dengan 't' selama interval ini. Nilai sinyal parabola satuan adalah nol untuk semua nilai negatif 't'.
Pada bab ini, mari kita bahas respon waktu dari sistem pesanan pertama. Perhatikan diagram blok sistem kontrol loop tertutup berikut. Di sini, fungsi transfer loop terbuka,$\frac{1}{sT}$ terhubung dengan umpan balik negatif kesatuan.

Kita tahu bahwa fungsi transfer dari sistem kontrol loop tertutup memiliki umpan balik negatif kesatuan sebagai,
$$\frac{C(s)}{R(s)}=\frac{G(s)}{1+G(s)}$$
Pengganti, $G(s)=\frac{1}{sT}$ dalam persamaan di atas.
$$\frac{C(s)}{R(s)}=\frac{\frac{1}{sT}}{1+\frac{1}{sT}}=\frac{1}{sT+1}$$
Pangkat s adalah satu dalam suku penyebut. Oleh karena itu, fungsi transfer di atas adalah urutan pertama dan sistem disebut sebagaifirst order system.
Kita dapat menulis ulang persamaan di atas sebagai
$$C(s)=\left ( \frac{1}{sT+1} \right )R(s)$$
Dimana,
C(s) adalah transformasi Laplace dari sinyal keluaran c (t),
R(s) adalah transformasi Laplace dari sinyal input r (t), dan
T adalah waktu yang konstan.
Ikuti langkah-langkah berikut untuk mendapatkan respon (keluaran) dari sistem urutan pertama dalam domain waktu.
Ambil transformasi Laplace dari sinyal input $r(t)$.
Perhatikan persamaannya, $C(s)=\left ( \frac{1}{sT+1} \right )R(s)$
Pengganti $R(s)$ nilai dalam persamaan di atas.
Kerjakan pecahan parsial dari $C(s)$ jika diperlukan.
Terapkan inversi Transformasi Laplace ke $C(s)$.
Pada bab sebelumnya, kita telah melihat sinyal uji standar seperti impuls, langkah, tanjakan, dan parabola. Sekarang mari kita cari tahu tanggapan dari sistem orde pertama untuk setiap masukan, satu per satu. Nama respons diberikan sesuai nama sinyal input. Misalnya, respons sistem untuk masukan impuls disebut sebagai respons impuls.
Respon Impuls Sistem Orde Pertama
Pertimbangkan unit impulse signal sebagai masukan untuk sistem orde pertama.
Begitu, $r(t)=\delta (t)$
Terapkan transformasi Laplace di kedua sisi.
$R(s)=1$
Perhatikan persamaannya, $C(s)=\left ( \frac{1}{sT+1} \right )R(s)$
Pengganti, $R(s) = 1$ dalam persamaan di atas.
$$C(s)=\left ( \frac{1}{sT+1} \right )(1)=\frac{1}{sT+1}$$
Susun ulang persamaan di atas dalam salah satu bentuk standar transformasi Laplace.
$$C(s)=\frac{1}{T\left (\ s+\frac{1}{T} \right )} \Rightarrow C(s)=\frac{1}{T}\left ( \frac{1}{s+\frac{1}{T}} \right )$$
Menerapkan transformasi Laplace terbalik di kedua sisi.
$$c(t)=\frac{1}{T}e^\left ( {-\frac{t}{T}} \right )u(t)$$
Respon impuls unit ditunjukkan pada gambar berikut.
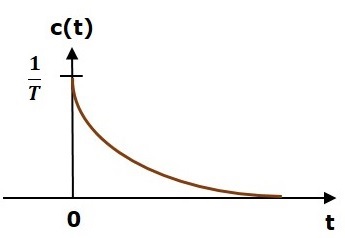
Itu unit impulse response, c (t) adalah sinyal peluruhan eksponensial untuk nilai positif 't' dan nol untuk nilai negatif 't'.
Langkah Respon Sistem First Order
Pertimbangkan unit step signal sebagai masukan untuk sistem orde pertama.
Begitu, $r(t)=u(t)$
Terapkan transformasi Laplace di kedua sisi.
$$R(s)=\frac{1}{s}$$
Perhatikan persamaannya, $C(s)=\left ( \frac{1}{sT+1} \right )R(s)$
Pengganti, $R(s)=\frac{1}{s}$ dalam persamaan di atas.
$$C(s)=\left ( \frac{1}{sT+1} \right )\left ( \frac{1}{s} \right )=\frac{1}{s\left ( sT+1 \right )}$$
Lakukan pecahan parsial dari C (s).
$$C(s)=\frac{1}{s\left ( sT+1 \right )}=\frac{A}{s}+\frac{B}{sT+1}$$
$$\Rightarrow \frac{1}{s\left ( sT+1 \right )}=\frac{A\left ( sT+1 \right )+Bs}{s\left ( sT+1 \right )}$$
Di kedua sisi, suku penyebutnya sama. Jadi, mereka akan dibatalkan satu sama lain. Oleh karena itu, samakan suku pembilangnya.
$$1=A\left ( sT+1 \right )+Bs$$
Dengan menyamakan konstanta di kedua sisi, Anda akan mendapatkan A = 1.
Gantikan, A = 1 dan samakan koefisien dari s istilah di kedua sisi.
$$0=T+B \Rightarrow B=-T$$
Substitusi, A = 1 dan B = −T dalam ekspansi pecahan parsial $C(s)$.
$$C(s)=\frac{1}{s}-\frac{T}{sT+1}=\frac{1}{s}-\frac{T}{T\left ( s+\frac{1}{T} \right )}$$
$$\Rightarrow C(s)=\frac{1}{s}-\frac{1}{s+\frac{1}{T}}$$
Terapkan transformasi Laplace terbalik di kedua sisi.
$$c(t)=\left ( 1-e^{-\left ( \frac{t}{T} \right )} \right )u(t)$$
Itu unit step response, c (t) memiliki suku transien dan kondisi tunak.
Istilah sementara dalam respons langkah unit adalah -
$$c_{tr}(t)=-e^{-\left ( \frac{t}{T} \right )}u(t)$$
Istilah kondisi mapan dalam respons langkah satuan adalah -
$$c_{ss}(t)=u(t)$$
Gambar berikut menunjukkan respons langkah unit.

Nilai dari unit step response, c(t)adalah nol pada t = 0 dan untuk semua nilai negatif t. Secara bertahap meningkat dari nilai nol dan akhirnya mencapai satu dalam kondisi mapan. Jadi, nilai steady state bergantung pada besarnya input.
Respon Tanjakan Sistem Orde Pertama
Pertimbangkan unit ramp signal sebagai masukan untuk sistem orde pertama.
$So, r(t)=tu(t)$
Terapkan transformasi Laplace di kedua sisi.
$$R(s)=\frac{1}{s^2}$$
Perhatikan persamaannya, $C(s)=\left ( \frac{1}{sT+1} \right )R(s)$
Pengganti, $R(s)=\frac{1}{s^2}$ dalam persamaan di atas.
$$C(s)=\left ( \frac{1}{sT+1} \right )\left ( \frac{1}{s^2} \right )=\frac{1}{s^2(sT+1)}$$
Kerjakan pecahan parsial dari $C(s)$.
$$C(s)=\frac{1}{s^2(sT+1)}=\frac{A}{s^2}+\frac{B}{s}+\frac{C}{sT+1}$$
$$\Rightarrow \frac{1}{s^2(sT+1)}=\frac{A(sT+1)+Bs(sT+1)+Cs^2}{s^2(sT+1)}$$
Di kedua sisi, suku penyebutnya sama. Jadi, mereka akan dibatalkan satu sama lain. Oleh karena itu, samakan suku pembilangnya.
$$1=A(sT+1)+Bs(sT+1)+Cs^2$$
Dengan menyamakan konstanta di kedua sisi, Anda akan mendapatkan A = 1.
Gantikan, A = 1 dan samakan koefisien dari suku-suku s di kedua sisi.
$$0=T+B \Rightarrow B=-T$$
Demikian pula, gantikan B = −T dan samakan koefisien dari $s^2$istilah di kedua sisi. Kamu akan mendapatkan$C=T^2$.
Substitusi A = 1, B = −T dan $C = T^2$ dalam perluasan fraksi parsial $C(s)$.
$$C(s)=\frac{1}{s^2}-\frac{T}{s}+\frac{T^2}{sT+1}=\frac{1}{s^2}-\frac{T}{s}+\frac{T^2}{T\left ( s+\frac{1}{T} \right )}$$
$$\Rightarrow C(s)=\frac{1}{s^2}-\frac{T}{s}+\frac{T}{s+\frac{1}{T}}$$
Terapkan transformasi Laplace terbalik di kedua sisi.
$$c(t)=\left ( t-T+Te^{-\left ( \frac{t}{T} \right )} \right )u(t)$$
Itu unit ramp response, c (t) memiliki suku transien dan kondisi tunak.
Istilah transien dalam respons ramp unit adalah -
$$c_{tr}(t)=Te^{-\left ( \frac{t}{T} \right )}u(t)$$
Istilah kondisi tunak dalam respons ramp unit adalah -
$$c_{ss}(t)=(t-T)u(t)$$
Gambar berikut menunjukkan respon ramp unit.

Itu unit ramp response, c (t) mengikuti sinyal input ramp unit untuk semua nilai positif t. Namun, ada penyimpangan satuan T dari sinyal masukan.
Respon Parabolik Sistem Orde Pertama
Pertimbangkan unit parabolic signal sebagai masukan untuk sistem orde pertama.
Begitu, $r(t)=\frac{t^2}{2}u(t)$
Terapkan transformasi Laplace di kedua sisi.
$$R(s)=\frac{1}{s^3}$$
Perhatikan persamaannya, $C(s)=\left ( \frac{1}{sT+1} \right )R(s)$
Pengganti $R(s)=\frac{1}{s^3}$ dalam persamaan di atas.
$$C(s)=\left ( \frac{1}{sT+1} \right )\left( \frac{1}{s^3} \right )=\frac{1}{s^3(sT+1)}$$
Kerjakan pecahan parsial dari $C(s)$.
$$C(s)=\frac{1}{s^3(sT+1)}=\frac{A}{s^3}+\frac{B}{s^2}+\frac{C}{s}+\frac{D}{sT+1}$$
Setelah disederhanakan, Anda akan mendapatkan nilai A, B, C dan D sebagai 1, $-T, \: T^2\: and \: −T^3$masing-masing. Gantikan nilai-nilai ini dalam ekspansi pecahan parsial C (s) di atas.
$C(s)=\frac{1}{s^3}-\frac{T}{s^2}+\frac{T^2}{s}-\frac{T^3}{sT+1} \: \Rightarrow C(s)=\frac{1}{s^3}-\frac{T}{s^2}+\frac{T^2}{s}-\frac{T^2}{s+\frac{1}{T}}$
Terapkan transformasi Laplace terbalik di kedua sisi.
$$c(t)=\left ( \frac{t^2}{2} -Tt+T^2-T^2e^{-\left ( \frac{t}{T} \right )} \right )u(t)$$
Itu unit parabolic response, c (t) memiliki suku transien dan kondisi tunak.
Istilah sementara dalam respons parabola unit adalah
$$C_{tr}(t)=-T^2e^{-\left ( \frac{t}{T} \right )}u(t)$$
Istilah kondisi mapan dalam respons parabola unit adalah
$$C_{ss}(t)=\left ( \frac{t^2}{2} -Tt+T^2 \right )u(t)$$
Dari tanggapan ini, kita dapat menyimpulkan bahwa sistem kontrol urutan pertama tidak stabil dengan masukan ramp dan parabola karena tanggapan ini terus meningkat bahkan pada waktu yang tidak terbatas. Sistem kontrol orde pertama stabil dengan input impuls dan langkah karena respons ini memiliki output yang dibatasi. Namun, impulse response tidak memiliki istilah steady state. Jadi, sinyal langkah banyak digunakan dalam domain waktu untuk menganalisis sistem kontrol dari tanggapannya.
Pada bab ini, mari kita bahas respon waktu dari sistem orde dua. Perhatikan diagram blok sistem kendali loop tertutup berikut. Di sini, fungsi transfer loop terbuka,$\frac{\omega ^2_n}{s(s+2\delta \omega_n)}$ terhubung dengan umpan balik negatif kesatuan.

Kita tahu bahwa fungsi transfer dari sistem kendali loop tertutup memiliki umpan balik negatif kesatuan sebagai
$$\frac{C(s)}{R(s)}=\frac{G(s)}{1+G(s)}$$
Pengganti, $G(s)=\frac{\omega ^2_n}{s(s+2\delta \omega_n)}$ dalam persamaan di atas.
$$\frac{C(s)}{R(s)}=\frac{\left (\frac{\omega ^2_n}{s(s+2\delta \omega_n)} \right )}{1+ \left ( \frac{\omega ^2_n}{s(s+2\delta \omega_n)} \right )}=\frac{\omega _n^2}{s^2+2\delta \omega _ns+\omega _n^2}$$
Pangkat dari 's' adalah dua dalam suku penyebut. Oleh karena itu, fungsi transfer di atas adalah orde kedua dan sistem disebut sebagaisecond order system.
Persamaan karakteristiknya adalah -
$$s^2+2\delta \omega _ns+\omega _n^2=0$$
Akar persamaan karakteristik adalah -
$$s=\frac{-2\omega \delta _n\pm \sqrt{(2\delta\omega _n)^2-4\omega _n^2}}{2}=\frac{-2(\delta\omega _n\pm \omega _n\sqrt{\delta ^2-1})}{2}$$
$$\Rightarrow s=-\delta \omega_n \pm \omega _n\sqrt{\delta ^2-1}$$
- Kedua akar tersebut bersifat imajiner jika δ = 0.
- Kedua akar adalah nyata dan sama jika δ = 1.
- Kedua akar adalah nyata tetapi tidak sama jika δ> 1.
- Kedua akar menjadi konjugasi kompleks jika 0 <δ <1.
Kita bisa menulis $C(s)$ persamaan sebagai,
$$C(s)=\left ( \frac{\omega _n^2}{s^2+2\delta\omega_ns+\omega_n^2} \right )R(s)$$
Dimana,
C(s) adalah transformasi Laplace dari sinyal keluaran, c (t)
R(s) adalah transformasi Laplace dari sinyal input, r (t)
ωn adalah frekuensi alami
δ adalah rasio redaman.
Ikuti langkah-langkah berikut untuk mendapatkan respon (keluaran) dari sistem urutan kedua dalam domain waktu.
Ambil transformasi Laplace dari sinyal input, $r(t)$.
Perhatikan persamaannya, $C(s)=\left ( \frac{\omega _n^2}{s^2+2\delta\omega_ns+\omega_n^2} \right )R(s)$
Pengganti $R(s)$ nilai dalam persamaan di atas.
Kerjakan pecahan parsial dari $C(s)$ jika diperlukan.
Terapkan inversi Transformasi Laplace ke $C(s)$.
Langkah Respon Sistem Orde Kedua
Pertimbangkan sinyal langkah unit sebagai masukan untuk sistem orde dua.
Transformasi Laplace dari sinyal langkah satuan adalah,
$$R(s)=\frac{1}{s}$$
Kita tahu fungsi transfer dari sistem kontrol loop tertutup orde dua adalah,
$$\frac{C(s)}{R(s)}=\frac{\omega _n^2}{s^2+2\delta\omega_ns+\omega_n^2}$$
Kasus 1: δ = 0
Pengganti, $\delta = 0$ dalam fungsi transfer.
$$\frac{C(s)}{R(s)}=\frac{\omega_n^2}{s^2+\omega_n^2}$$
$$\Rightarrow C(s)=\left( \frac{\omega_n^2}{s^2+\omega_n^2} \right )R(s)$$
Pengganti, $R(s) = \frac{1}{s}$ dalam persamaan di atas.
$$C(s)=\left( \frac{\omega_n^2}{s^2+\omega_n^2} \right )\left( \frac{1}{s} \right )=\frac{\omega_n^2}{s(s^2+\omega_n^2)}$$
Terapkan transformasi Laplace terbalik di kedua sisi.
$$c(t)=\left ( 1-\cos(\omega_n t) \right )u(t)$$
Jadi, respons langkah unit dari sistem orde dua saat $/delta = 0$ akan menjadi sinyal waktu kontinu dengan amplitudo dan frekuensi konstan.
Kasus 2: δ = 1
Pengganti, $/delta = 1$ dalam fungsi transfer.
$$\frac{C(s)}{R(s)}=\frac{\omega_n^2}{s^2+2\omega_ns+\omega_n^2}$$
$$\Rightarrow C(s)=\left( \frac{\omega_n^2}{(s+\omega_n)^2} \right)R(s)$$
Pengganti, $R(s) = \frac{1}{s}$ dalam persamaan di atas.
$$C(s)=\left( \frac{\omega_n^2}{(s+\omega_n)^2} \right)\left ( \frac{1}{s} \right)=\frac{\omega_n^2}{s(s+\omega_n)^2}$$
Kerjakan pecahan parsial dari $C(s)$.
$$C(s)=\frac{\omega_n^2}{s(s+\omega_n)^2}=\frac{A}{s}+\frac{B}{s+\omega_n}+\frac{C}{(s+\omega_n)^2}$$
Setelah disederhanakan, Anda akan mendapatkan nilai A, B dan C sebagai $1,\: -1\: and \: −\omega _n$masing-masing. Gantikan nilai-nilai ini dalam ekspansi pecahan parsial di atas$C(s)$.
$$C(s)=\frac{1}{s}-\frac{1}{s+\omega_n}-\frac{\omega_n}{(s+\omega_n)^2}$$
Terapkan transformasi Laplace terbalik di kedua sisi.
$$c(t)=(1-e^{-\omega_nt}-\omega _nte^{-\omega_nt})u(t)$$
Jadi, respons langkah unit dari sistem orde dua akan mencoba mencapai input langkah dalam kondisi tunak.
Kasus 3: 0 <δ <1
Kita dapat memodifikasi suku penyebut dari fungsi transfer sebagai berikut -
$$s^2+2\delta\omega_ns+\omega_n^2=\left \{ s^2+2(s)(\delta \omega_n)+(\delta \omega_n)^2 \right \}+\omega_n^2-(\delta\omega_n)^2$$
$$=(s+\delta\omega_n)^2+\omega_n^2(1-\delta^2)$$
Fungsi transfer menjadi,
$$\frac{C(s)}{R(s)}=\frac{\omega_n^2}{(s+\delta\omega_n)^2+\omega_n^2(1-\delta^2)}$$
$$\Rightarrow C(s)=\left( \frac{\omega_n^2}{(s+\delta\omega_n)^2+\omega_n^2(1-\delta^2)} \right )R(s)$$
Pengganti, $R(s) = \frac{1}{s}$ dalam persamaan di atas.
$$C(s)=\left( \frac{\omega_n^2}{(s+\delta\omega_n)^2+\omega_n^2(1-\delta^2)} \right )\left( \frac{1}{s} \right )=\frac{\omega_n^2}{s\left ((s+\delta\omega_n)^2+\omega_n^2(1-\delta^2) \right)}$$
Kerjakan pecahan parsial dari $C(s)$.
$$C(s)=\frac{\omega_n^2}{s\left ((s+\delta\omega_n)^2+\omega_n^2(1-\delta^2) \right)}=\frac{A}{s}+\frac{Bs+C}{(s+\delta\omega_n)^2+\omega_n^2(1-\delta^2)}$$
Setelah disederhanakan, Anda akan mendapatkan nilai A, B dan C sebagai $1,\: -1 \: and \: −2\delta \omega _n$masing-masing. Gantikan nilai-nilai ini dalam ekspansi pecahan parsial C (s) di atas.
$$C(s)=\frac{1}{s}-\frac{s+2\delta\omega_n}{(s+\delta\omega_n)^2+\omega_n^2(1-\delta^2)}$$
$$C(s)=\frac{1}{s}-\frac{s+\delta\omega_n}{(s+\delta\omega_n)^2+\omega_n^2(1-\delta^2)}-\frac{\delta\omega_n}{(s+\delta\omega_n)^2+\omega_n^2(1-\delta^2)}$$
$C(s)=\frac{1}{s}-\frac{(s+\delta\omega_n)}{(s+\delta\omega_n)^2+(\omega_n\sqrt{1-\delta^2})^2}-\frac{\delta}{\sqrt{1-\delta^2}}\left ( \frac{\omega_n\sqrt{1-\delta^2}}{(s+\delta\omega_n)^2+(\omega_n\sqrt{1-\delta^2})^2} \right )$
Pengganti, $\omega_n\sqrt{1-\delta^2}$ sebagai $\omega_d$ dalam persamaan di atas.
$$C(s)=\frac{1}{s}-\frac{(s+\delta\omega_n)}{(s+\delta\omega_n)^2+\omega_d^2}-\frac{\delta}{\sqrt{1-\delta^2}}\left ( \frac{\omega_d}{(s+\delta\omega_n)^2+\omega_d^2} \right )$$
Terapkan transformasi Laplace terbalik di kedua sisi.
$$c(t)=\left ( 1-e^{-\delta \omega_nt}\cos(\omega_dt)-\frac{\delta}{\sqrt{1-\delta^2}}e^{-\delta\omega_nt}\sin(\omega_dt) \right )u(t)$$
$$c(t)=\left ( 1-\frac{e^{-\delta\omega_nt}}{\sqrt{1-\delta^2}}\left ( (\sqrt{1-\delta^2})\cos(\omega_dt)+\delta \sin(\omega_dt) \right ) \right )u(t)$$
Jika $\sqrt{1-\delta^2}=\sin(\theta)$, maka 'δ' akan menjadi cos (θ). Gantikan nilai-nilai ini dalam persamaan di atas.
$$c(t)=\left ( 1-\frac{e^{-\delta\omega_nt}}{\sqrt{1-\delta^2}}(\sin(\theta)\cos(\omega_dt)+\cos(\theta)\sin(\omega_dt)) \right )u(t)$$
$$\Rightarrow c(t)=\left ( 1-\left ( \frac{e^{-\delta\omega_nt}}{\sqrt{1-\delta^2}} \right )\sin(\omega_dt+\theta) \right )u(t)$$
Jadi, respons langkah unit dari sistem orde dua mengalami osilasi teredam (penurunan amplitudo) ketika 'δ' terletak di antara nol dan satu.
Kasus 4: δ> 1
Kita dapat memodifikasi suku penyebut dari fungsi transfer sebagai berikut -
$$s^2+2\delta\omega_ns+\omega_n^2=\left \{ s^2+2(s)(\delta\omega_n)+(\delta\omega_n)^2 \right \}+\omega_n^2-(\delta\omega_n)^2$$
$$=\left ( s+\delta\omega_n \right )^2-\omega_n^2\left ( \delta^2-1 \right )$$
Fungsi transfer menjadi,
$$\frac{C(s)}{R(s)}=\frac{\omega_n^2}{(s+\delta\omega_n)^2-\omega_n^2(\delta^2-1)}$$
$$\Rightarrow C(s)=\left ( \frac{\omega_n^2}{(s+\delta\omega_n)^2-\omega_n^2(\delta^2-1)} \right )R(s)$$
Pengganti, $R(s) = \frac{1}{s}$ dalam persamaan di atas.
$C(s)=\left ( \frac{\omega_n^2}{(s+\delta\omega_n)^2-(\omega_n\sqrt{\delta^2-1})^2} \right )\left ( \frac{1}{s} \right )=\frac{\omega_n^2}{s(s+\delta\omega_n+\omega_n\sqrt{\delta^2-1})(s+\delta\omega_n-\omega_n\sqrt{\delta^2-1})}$
Kerjakan pecahan parsial dari $C(s)$.
$$C(s)=\frac{\omega_n^2}{s(s+\delta\omega_n+\omega_n\sqrt{\delta^2-1})(s+\delta\omega_n-\omega_n\sqrt{\delta^2-1})}$$
$$=\frac{A}{s}+\frac{B}{s+\delta\omega_n+\omega_n\sqrt{\delta^2-1}}+\frac{C}{s+\delta\omega_n-\omega_n\sqrt{\delta^2-1}}$$
Setelah disederhanakan, Anda akan mendapatkan nilai A, B dan C sebagai 1, $\frac{1}{2(\delta+\sqrt{\delta^2-1})(\sqrt{\delta^2-1})}$ dan $\frac{-1}{2(\delta-\sqrt{\delta^2-1})(\sqrt{\delta^2-1})}$masing-masing. Gantikan nilai-nilai ini dalam pemuaian pecahan parsial di atas$C(s)$.
$$C(s)=\frac{1}{s}+\frac{1}{2(\delta+\sqrt{\delta^2-1})(\sqrt{\delta^2-1})}\left ( \frac{1}{s+\delta\omega_n+\omega_n\sqrt{\delta^2-1}} \right )-\left ( \frac{1}{2(\delta-\sqrt{\delta^2-1})(\sqrt{\delta^2-1})} \right )\left ( \frac{1}{s+\delta\omega_n-\omega_n\sqrt{\delta^2-1}} \right )$$
Terapkan transformasi Laplace terbalik di kedua sisi.
$c(t)=\left ( 1+\left ( \frac{1}{2(\delta+\sqrt{\delta^2-1})(\sqrt{\delta^2-1})} \right )e^{-(\delta\omega_n+\omega_n\sqrt{\delta^2-1})t}-\left ( \frac{1}{2(\delta-\sqrt{\delta^2-1})(\sqrt{\delta^2-1})} \right )e^{-(\delta\omega_n-\omega_n\sqrt{\delta^2-1})t} \right )u(t)$
Karena terlalu teredam, respons langkah unit dari sistem orde dua saat δ> 1 tidak akan pernah mencapai input langkah dalam kondisi tunak.
Respon Impuls dari Sistem Orde Kedua
Itu impulse response sistem orde kedua dapat diperoleh dengan menggunakan salah satu dari dua metode ini.
Ikuti prosedur yang terlibat saat memperoleh respons langkah dengan mempertimbangkan nilai $R(s)$ sebagai 1, bukan $\frac{1}{s}$.
Lakukan diferensiasi respon langkah.
Tabel berikut menunjukkan respons impuls dari sistem orde dua untuk 4 kasus rasio redaman.
| Kondisi rasio redaman | Respon impuls untuk t ≥ 0 |
|---|---|
δ = 0 |
$\omega_n\sin(\omega_nt)$ |
δ = 1 |
$\omega_n^2te^{-\omega_nt}$ |
0 <δ <1 |
$\left ( \frac{\omega_ne^{-\delta\omega_nt}}{\sqrt{1-\delta^2}} \right )\sin(\omega_dt)$ |
δ> 1 |
$\left ( \frac{\omega_n}{2\sqrt{\delta^2-1}} \right )\left ( e^{-(\delta\omega_n-\omega_n\sqrt{\delta^2-1})t}-e^{-(\delta\omega_n+\omega_n\sqrt{\delta^2-1})t} \right )$ |
Dalam bab ini, mari kita bahas spesifikasi domain waktu dari sistem orde dua. Respon langkah sistem orde dua untuk kasus underdamped ditunjukkan pada gambar berikut.

Semua spesifikasi domain waktu direpresentasikan dalam gambar ini. Respon hingga settling time dikenal sebagai respon transient dan respon setelah settling time dikenal sebagai respon steady state.
Waktu penundaan
Ini adalah waktu yang dibutuhkan untuk mencapai tanggapan half of its final valuedari nol instan. Ini dilambangkan dengan$t_d$.
Pertimbangkan respon langkah sistem orde dua untuk t ≥ 0, ketika 'δ' terletak di antara nol dan satu.
$$c(t)=1-\left ( \frac{e^{-\delta \omega_nt}}{\sqrt{1-\delta^2}} \right )\sin(\omega_dt+\theta)$$
Nilai akhir dari respons langkah adalah satu.
Oleh karena itu, di $t=t_d$, nilai respons langkah akan menjadi 0,5. Gantikan, nilai-nilai ini dalam persamaan di atas.
$$c(t_d)=0.5=1-\left ( \frac{e^{-\delta\omega_nt_d}}{\sqrt{1-\delta^2}} \right )\sin(\omega_dt_d+\theta)$$
$$\Rightarrow \left ( \frac{e^{-\delta\omega_nt_d}}{\sqrt{1-\delta^2}} \right )\sin(\omega_dt_d+\theta)=0.5$$
Dengan menggunakan pendekatan linier, Anda akan mendapatkan delay time td sebagai
$$t_d=\frac{1+0.7\delta}{\omega_n}$$
Rise Time
Ini adalah waktu yang dibutuhkan untuk memunculkan respons 0% to 100% of its final value. Ini berlaku untukunder-damped systems. Untuk sistem yang terlalu teredam, pertimbangkan durasi dari 10% hingga 90% dari nilai akhir. Waktu naik dilambangkan dengantr.
Pada t = t 1 = 0, c (t) = 0.
Kita tahu bahwa nilai akhir dari respons langkah adalah satu.
Oleh karena itu, di $t = t_2$, nilai respons langkah adalah satu. Gantikan, nilai-nilai ini dalam persamaan berikut.
$$c(t)=1-\left ( \frac{e^{-\delta \omega_nt}}{\sqrt{1-\delta^2}} \right )\sin(\omega_dt+\theta)$$
$$c(t_2)=1=1-\left ( \frac{e^{-\delta\omega_nt_2}}{\sqrt{1-\delta^2}} \right )\sin(\omega_dt_2+\theta)$$
$$\Rightarrow \left ( \frac{e^{-\delta\omega_nt_2}}{\sqrt{1-\delta^2}} \right )\sin(\omega_dt_2+\theta)=0$$
$$\Rightarrow \sin(\omega_dt_2+\theta)=0$$
$$\Rightarrow \omega_dt_2+\theta=\pi$$
$$\Rightarrow t_2=\frac{\pi-\theta}{\omega_d}$$
Gantikan nilai t 1 dan t 2 dalam persamaan berikut daririse time,
$$t_r=t_2-t_1$$
$$\therefore \: t_r=\frac{\pi-\theta}{\omega_d}$$
Dari persamaan di atas, dapat disimpulkan bahwa rise time $t_r$ dan frekuensi teredam $\omega_d$ berbanding terbalik satu sama lain.
Waktu Puncak
Ini adalah waktu yang dibutuhkan respon untuk mencapai peak valueuntuk pertama kalinya. Ini dilambangkan dengan$t_p$. Di$t = t_p$, turunan pertama dari responsnya adalah nol.
Kita tahu respon langkah sistem orde dua untuk kasus under-damped adalah
$$c(t)=1-\left ( \frac{e^{-\delta \omega_nt}}{\sqrt{1-\delta^2}} \right )\sin(\omega_dt+\theta)$$
Membedakan $c(t)$ sehubungan dengan 't'.
$$\frac{\text{d}c(t)}{\text{d}t}=-\left ( \frac{e^{-\delta\omega_nt}}{\sqrt{1-\delta^2}} \right )\omega_d\cos(\omega_dt+\theta)-\left ( \frac{-\delta\omega_ne^{-\delta\omega_nt}}{\sqrt{1-\delta^2}} \right )\sin(\omega_dt+\theta)$$
Pengganti, $t=t_p$ dan $\frac{\text{d}c(t)}{\text{d}t}=0$ dalam persamaan di atas.
$$0=-\left ( \frac{e^{-\delta\omega_nt_p}}{\sqrt{1-\delta^2}} \right )\left [ \omega_d\cos(\omega_dt_p+\theta)-\delta\omega_n\sin(\omega_dt_p+\theta) \right ]$$
$$\Rightarrow \omega_n\sqrt{1-\delta^2}\cos(\omega_dt_p+\theta)-\delta\omega_n\sin(\omega_dt_p+\theta)=0$$
$$\Rightarrow \sqrt{1-\delta^2}\cos(\omega_dt_p+\theta)-\delta\sin(\omega_dt_p+\theta)=0$$
$$\Rightarrow \sin(\theta)\cos(\omega_dt_p+\theta)-\cos(\theta)\sin(\omega_dt_p+\theta)=0$$
$$\Rightarrow \sin(\theta-\omega_dt_p-\theta)=0$$
$$\Rightarrow sin(-\omega_dt_p)=0\Rightarrow -\sin(\omega_dt_p)=0\Rightarrow sin(\omega_dt_p)=0$$
$$\Rightarrow \omega_dt_p=\pi$$
$$\Rightarrow t_p=\frac{\pi}{\omega_d}$$
Dari persamaan di atas, dapat disimpulkan bahwa waktu puncak $t_p$ dan frekuensi teredam $\omega_d$ berbanding terbalik satu sama lain.
Puncak Overshoot
Melampaui puncak Mpdidefinisikan sebagai penyimpangan respons pada waktu puncak dari nilai akhir respons. Itu juga disebutmaximum overshoot.
Secara matematis, kita bisa menulisnya sebagai
$$M_p=c(t_p)-c(\infty)$$
Dimana,
c (t p ) adalah nilai puncak dari respon.
c (∞) adalah nilai akhir (kondisi stabil) dari respons.
Di $t = t_p$, respon c (t) adalah -
$$c(t_p)=1-\left ( \frac{e^{-\delta\omega_nt_p}}{\sqrt{1-\delta^2}} \right )\sin(\omega_dt_p+\theta)$$
Pengganti, $t_p=\frac{\pi}{\omega_d}$ di sisi kanan persamaan di atas.
$$c(t_P)=1-\left ( \frac{e^{-\delta\omega_n\left ( \frac{\pi}{\omega_d} \right )}}{\sqrt{1-\delta^2}} \right )\sin\left ( \omega_d\left ( \frac{\pi}{\omega_d} \right ) +\theta\right )$$
$$\Rightarrow c(t_p)=1-\left ( \frac{e^{-\left ( \frac{\delta\pi}{\sqrt{1-\delta^2}} \right )}}{\sqrt{1-\delta^2}} \right )(-\sin(\theta))$$
Kami tahu itu
$$\sin(\theta)=\sqrt{1-\delta^2}$$
Jadi, kita akan mendapatkannya $c(t_p)$ sebagai
$$c(t_p)=1+e^{-\left ( \frac{\delta\pi}{\sqrt{1-\delta^2}} \right )}$$
Gantikan nilai dari $c(t_p)$ dan $c(\infty)$ dalam persamaan peak overshoot.
$$M_p=1+e^{-\left ( \frac{\delta\pi}{\sqrt{1-\delta^2}} \right )}-1$$
$$\Rightarrow M_p=e^{-\left ( \frac{\delta\pi}{\sqrt{1-\delta^2}} \right )}$$
Percentage of peak overshoot % $M_p$ dapat dihitung dengan menggunakan rumus ini.
$$\%M_p=\frac{M_p}{c(\infty )}\times 100\%$$
Dengan mengganti nilai $M_p$ dan $c(\infty)$ dalam rumus di atas, kita akan mendapatkan Persentase overshoot puncak $\%M_p$ sebagai
$$\%M_p=\left ( e^ {-\left ( \frac{\delta\pi}{\sqrt{1-\delta^2}} \right )} \right )\times 100\%$$
Dari persamaan di atas, dapat disimpulkan bahwa persentase peak overshoot $\% M_p$ akan menurun jika rasio redaman $\delta$ meningkat.
Waktu penyelesaian
Ini adalah waktu yang diperlukan agar respons mencapai kondisi tunak dan tetap dalam rentang toleransi yang ditentukan di sekitar nilai akhir. Secara umum batas toleransi adalah 2% dan 5%. Waktu penyelesaian dilambangkan dengan$t_s$.
Waktu pengendapan untuk pita toleransi 5% adalah -
$$t_s=\frac{3}{\delta\omega_n}=3\tau$$
Waktu pengendapan untuk pita toleransi 2% adalah -
$$t_s=\frac{4}{\delta\omega_n}=4\tau$$
Dimana, $\tau$ adalah konstanta waktu dan sama dengan $\frac{1}{\delta\omega_n}$.
Baik waktu penyelesaian $t_s$ dan konstanta waktu $\tau$ berbanding terbalik dengan rasio redaman $\delta$.
Baik waktu penyelesaian $t_s$ dan konstanta waktu $\tau$tidak tergantung pada penguatan sistem. Itu berarti bahkan sistem mendapatkan perubahan, waktu penyelesaian$t_s$ dan waktu yang konstan $\tau$ tidak akan pernah berubah.
Contoh
Sekarang mari kita temukan spesifikasi domain waktu dari sistem kontrol yang memiliki fungsi transfer loop tertutup $\frac{4}{s^2+2s+4}$ ketika sinyal langkah unit diterapkan sebagai input ke sistem kontrol ini.
Kita tahu bahwa bentuk standar dari fungsi transfer orde dua sistem kontrol loop tertutup sebagai
$$\frac{\omega_n^2}{s^2+2\delta\omega_ns+\omega_n^2}$$
Dengan menyamakan kedua fungsi transfer ini, kita akan mendapatkan frekuensi natural yang tidak teredam $\omega_n$ sebagai 2 rad / detik dan rasio redaman $\delta$ sebagai 0,5.
Kita tahu rumus frekuensi teredam $\omega_d$ sebagai
$$\omega_d=\omega_n\sqrt{1-\delta^2}$$
Pengganti, $\omega_n$ dan $\delta$ nilai dalam rumus di atas.
$$\Rightarrow \omega_d=2\sqrt{1-(0.5)^2}$$
$$\Rightarrow \omega_d=1.732 \: rad/sec$$
Pengganti, $\delta$ nilai dalam hubungan berikut
$$\theta=\cos^{-1}\delta$$
$$\Rightarrow \theta=\cos^{-1}(0.5)=\frac{\pi}{3}\:rad$$
Gantikan nilai yang diperlukan di atas dalam rumus setiap spesifikasi domain waktu dan sederhanakan untuk mendapatkan nilai spesifikasi domain waktu untuk fungsi transfer yang diberikan.
Tabel berikut menunjukkan rumus spesifikasi domain waktu, substitusi nilai yang diperlukan dan nilai akhir.
| Spesifikasi domain waktu | Rumus | Substitusi nilai dalam Formula | Nilai akhir |
|---|---|---|---|
Waktu penundaan |
$t_d=\frac{1+0.7\delta}{\omega_n}$ |
$t_d=\frac{1+0.7(0.5)}{2}$ |
$t_d$= 0,675 dtk |
Waktu bangun |
$t_r=\frac{\pi-\theta}{\omega_d}$ |
$t_r=\frac{\pi-(\frac{\pi}{3})}{1.732}$ |
$t_r$= 1,207 dtk |
Waktu puncak |
$t_p=\frac{\pi}{\omega_d}$ |
$t_p=\frac{\pi}{1.732}$ |
$t_p$= 1,813 dtk |
% Puncak overshoot |
$\%M_p=\left( e^{-\left (\frac{\delta\pi}{\sqrt{1-\delta^2}} \right ) }\right )\times 100\%$ |
$\%M_p=\left( e^{-\left (\frac{0.5\pi}{\sqrt{1-(0.5)^2}} \right ) }\right )\times 100\%$ |
$\% \: M_p$= 16,32% |
Waktu penyelesaian untuk pita toleransi 2% |
$t_s=\frac{4}{\delta\omega_n}$ |
$t_S=\frac{4}{(0.5)(2)}$ |
$t_s$= 4 dtk |
Deviasi keluaran sistem kendali dari respon yang diinginkan selama kondisi tunak dikenal sebagai steady state error. Ini direpresentasikan sebagai$e_{ss}$. Kita dapat menemukan kesalahan kondisi tunak menggunakan teorema nilai akhir sebagai berikut.
$$e_{ss}=\lim_{t \to \infty}e(t)=\lim_{s \to 0}sE(s)$$
Dimana,
E (s) adalah transformasi Laplace dari sinyal kesalahan, $e(t)$
Mari kita bahas bagaimana menemukan kesalahan kondisi tunak untuk umpan balik kesatuan dan sistem kontrol umpan balik non-kesatuan satu per satu.
Kesalahan Status Mantap untuk Sistem Umpan Balik Unity
Pertimbangkan diagram blok sistem kontrol loop tertutup berikut, yang memiliki umpan balik negatif kesatuan.

Dimana,
- R (s) adalah transformasi Laplace dari sinyal Input referensi $r(t)$
- C (s) adalah transformasi Laplace dari sinyal keluaran $c(t)$
Kita tahu fungsi transfer umpan balik negatif kesatuan sistem kontrol loop tertutup sebagai
$$\frac{C(s)}{R(s)}=\frac{G(s)}{1+G(s)}$$
$$\Rightarrow C(s)=\frac{R(s)G(s)}{1+G(s)}$$
Output dari titik penjumlahan adalah -
$$E(s)=R(s)-C(s)$$
Pengganti $C(s)$ nilai dalam persamaan di atas.
$$E(s)=R(s)-\frac{R(s)G(s)}{1+G(s)}$$
$$\Rightarrow E(s)=\frac{R(s)+R(s)G(s)-R(s)G(s)}{1+G(s)}$$
$$\Rightarrow E(s)=\frac{R(s)}{1+G(s)}$$
Pengganti $E(s)$ nilai dalam rumus kesalahan kondisi tunak
$$e_{ss}=\lim_{s \to 0} \frac{sR(s)}{1+G(s)}$$
Tabel berikut menunjukkan kesalahan kondisi tunak dan konstanta kesalahan untuk sinyal input standar seperti langkah unit, jalur unit & sinyal parabola unit.
| Sinyal masukan | Kesalahan keadaan stabil $e_{ss}$ | Kesalahan konstan |
|---|---|---|
sinyal langkah unit |
$\frac{1}{1+k_p}$ |
$K_p=\lim_{s \to 0}G(s)$ |
sinyal ramp unit |
$\frac{1}{K_v}$ |
$K_v=\lim_{s \to 0}sG(s)$ |
sinyal parabola unit |
$\frac{1}{K_a}$ |
$K_a=\lim_{s \to 0}s^2G(s)$ |
Dimana, $K_p$, $K_v$ dan $K_a$ adalah konstanta kesalahan posisi, konstanta kesalahan kecepatan, dan konstanta kesalahan percepatan.
Note - Jika salah satu sinyal input di atas memiliki amplitudo selain kesatuan, maka kalikan kesalahan kondisi tunak yang sesuai dengan amplitudo tersebut.
Note- Kami tidak dapat menentukan kesalahan kondisi tunak untuk sinyal impuls unit karena, ini hanya ada di tempat asal. Jadi, kita tidak dapat membandingkan respons impuls dengan input impuls unit sebagait menunjukkan tak terhingga.
Contoh
Mari kita temukan kesalahan kondisi tunak untuk sinyal input $r(t)=\left( 5+2t+\frac{t^2}{2} \right )u(t)$ dari kesatuan sistem kontrol umpan balik negatif dengan $G(s)=\frac{5(s+4)}{s^2(s+1)(s+20)}$
Sinyal input yang diberikan merupakan gabungan dari tiga sinyal step, ramp dan parabolic. Tabel berikut menunjukkan konstanta kesalahan dan nilai kesalahan kondisi tunak untuk ketiga sinyal ini.
| Sinyal masukan | Kesalahan konstan | Kesalahan keadaan stabil |
|---|---|---|
$r_1(t)=5u(t)$ |
$K_p=\lim_{s \to 0}G(s)=\infty$ |
$e_{ss1}=\frac{5}{1+k_p}=0$ |
$r_2(t)=2tu(t)$ |
$K_v=\lim_{s \to 0}sG(s)=\infty$ |
$e_{ss2}=\frac{2}{K_v}=0$ |
$r_3(t)=\frac{t^2}{2}u(t)$ |
$K_a=\lim_{s \to 0}s^2G(s)=1$ |
$e_{ss3}=\frac{1}{k_a}=1$ |
Kita akan mendapatkan error kondisi tunak secara keseluruhan, dengan menambahkan tiga error kondisi tunak di atas.
$$e_{ss}=e_{ss1}+e_{ss2}+e_{ss3}$$
$$\Rightarrow e_{ss}=0+0+1=1$$
Oleh karena itu, kami mendapatkan kesalahan kondisi tunak $e_{ss}$ sebagai 1 untuk contoh ini.
Kesalahan Status Mantap untuk Sistem Umpan Balik Non-Unity
Pertimbangkan diagram blok sistem kontrol loop tertutup berikut, yang memiliki umpan balik negatif nonunitas.

Kami dapat menemukan kesalahan kondisi tunak hanya untuk sistem umpan balik kesatuan. Jadi, kita harus mengubah sistem umpan balik non-unity menjadi sistem umpan balik kesatuan. Untuk ini, sertakan satu jalur umpan balik positif dan satu jalur umpan balik negatif dalam diagram blok di atas. Diagram blok baru terlihat seperti yang ditunjukkan di bawah ini.

Sederhanakan diagram blok di atas dengan mempertahankan umpan balik negatif kesatuan sebagaimana adanya. Berikut ini adalah diagram blok yang disederhanakan.

Diagram blok ini menyerupai diagram blok sistem kendali loop tertutup umpan balik negatif kesatuan. Di sini, satu blok memiliki fungsi transfer$\frac{G(s)}{1+G(s)H(s)-G(s)}$ dari pada $G(s)$. Anda sekarang dapat menghitung kesalahan kondisi tunak dengan menggunakan rumus kesalahan kondisi tunak yang diberikan untuk sistem umpan balik negatif kesatuan.
Note- Tidak ada artinya menemukan kesalahan kondisi tunak untuk sistem loop tertutup yang tidak stabil. Jadi, kita harus menghitung kesalahan kondisi tunak hanya untuk sistem stabil loop tertutup. Artinya kita perlu mengecek apakah sistem kendali stabil atau tidak sebelum menemukan kesalahan steady state. Pada bab selanjutnya, kita akan membahas stabilitas yang berkaitan dengan konsep.
Stabilitas adalah konsep penting. Pada bab ini, mari kita bahas stabilitas sistem dan tipe sistem berdasarkan stabilitas.
Apa Stabilitas?
Suatu sistem dikatakan stabil, jika keluarannya terkendali. Jika tidak, dikatakan tidak stabil. SEBUAHstable system menghasilkan keluaran yang dibatasi untuk masukan terikat yang diberikan.
Gambar berikut menunjukkan respon dari sistem yang stabil.

Ini adalah respon sistem kontrol orde pertama untuk input langkah unit. Respon ini memiliki nilai antara 0 dan 1. Jadi, ini adalah keluaran yang dibatasi. Kita tahu bahwa sinyal langkah satuan memiliki nilai satu untuk semua nilai positifttermasuk nol. Jadi, itu adalah input yang dibatasi. Oleh karena itu, sistem kontrol orde pertama stabil karena input dan output dibatasi.
Jenis Sistem berdasarkan Stabilitas
Kita dapat mengklasifikasikan sistem berdasarkan stabilitas sebagai berikut.
- Sistem yang benar-benar stabil
- Sistem stabil bersyarat
- Sistem agak stabil
Sistem Yang Benar-Benar Stabil
Jika sistem stabil untuk semua rentang nilai komponen sistem, maka itu dikenal sebagai absolutely stable system. Sistem kontrol loop terbuka benar-benar stabil jika semua kutub dari fungsi transfer loop terbuka ada di bagian kiri‘s’ plane. Demikian pula, sistem kontrol loop tertutup benar-benar stabil jika semua kutub dari fungsi transfer loop tertutup ada di separuh kiri bidang 's'.
Sistem Stabil Bersyarat
Jika sistem stabil untuk rentang nilai komponen sistem tertentu, maka itu dikenal sebagai conditionally stable system.
Sistem Marginally Stabil
Jika sistem stabil dengan menghasilkan sinyal output dengan amplitudo konstan dan frekuensi osilasi konstan untuk input terbatas, maka itu dikenal sebagai marginally stable system. Sistem kendali loop terbuka sedikit stabil jika ada dua kutub dari fungsi transfer loop terbuka pada sumbu imajiner. Demikian pula, sistem kontrol loop tertutup sedikit stabil jika ada dua kutub dari fungsi transfer loop tertutup pada sumbu imajiner.
Dalam bab ini, mari kita bahas analisis stabilitas di ‘s’domain menggunakan kriteria stabilitas RouthHurwitz. Dalam kriteria ini, diperlukan persamaan karakteristik untuk mencari kestabilan sistem kendali loop tertutup.
Kriteria Stabilitas Routh-Hurwitz
Kriteria stabilitas Routh-Hurwitz adalah memiliki satu kondisi yang diperlukan dan satu kondisi yang cukup untuk stabilitas. Jika ada sistem kendali yang tidak memenuhi syarat yang diperlukan, maka dapat dikatakan bahwa sistem kendali tersebut tidak stabil. Tetapi, jika sistem kendali memenuhi kondisi yang diperlukan, maka mungkin atau mungkin tidak stabil. Jadi, kondisi yang cukup membantu untuk mengetahui apakah sistem kendali tersebut stabil atau tidak.
Kondisi yang Diperlukan untuk Stabilitas Routh-Hurwitz
Kondisi yang diperlukan adalah bahwa koefisien polinomial karakteristik harus positif. Ini menyiratkan bahwa semua akar persamaan karakteristik harus memiliki bagian nyata negatif.
Perhatikan persamaan karakteristik orde 'n' adalah -
$$a_0s^n+a_1s^{n-1}+a_2s^{n-2}+...+a_{n-1}s^1+a_ns^0=0$$
Perhatikan bahwa, seharusnya tidak ada istilah yang hilang di file nthpersamaan karakteristik pesanan. Artinya filenth persamaan karakteristik pesanan tidak boleh memiliki koefisien yang bernilai nol.
Kondisi Yang Cukup untuk Stabilitas Routh-Hurwitz
Kondisi yang cukup adalah bahwa semua elemen dari kolom pertama dari array Routh harus memiliki tanda yang sama. Ini berarti bahwa semua elemen pada kolom pertama dari array Routh harus bernilai positif atau negatif.
Metode Routh Array
Jika semua akar persamaan karakteristik ada di paruh kiri bidang 's', maka sistem kontrolnya stabil. Jika setidaknya satu akar persamaan karakteristik ada di paruh kanan bidang 's', maka sistem kontrol tidak stabil. Jadi, kita harus mencari akar dari persamaan karakteristik untuk mengetahui apakah sistem kendali stabil atau tidak. Tetapi, sulit untuk menemukan akar dari persamaan karakteristik seiring bertambahnya urutan.
Jadi, untuk mengatasi masalah ini di sana kami memiliki Routh array method. Dalam metode ini, tidak perlu menghitung akar persamaan karakteristik. Pertama-tama rumuskan tabel Routh dan temukan jumlah perubahan tanda di kolom pertama tabel Routh. Banyaknya perubahan tanda pada kolom pertama tabel Routh memberikan jumlah akar persamaan karakteristik yang ada pada separuh kanan bidang 's' dan sistem kontrol tidak stabil.
Ikuti prosedur ini untuk membentuk tabel Routh.
Isi dua baris pertama dari larik Routh dengan koefisien polinomial karakteristik seperti yang disebutkan dalam tabel di bawah. Mulailah dengan koefisien$s^n$ dan lanjutkan ke koefisien $s^0$.
Isi baris tersisa dari array Routh dengan elemen seperti yang disebutkan pada tabel di bawah. Lanjutkan proses ini sampai Anda mendapatkan elemen kolom pertamarow $s^0$ adalah $a_n$. Sini,$a_n$ adalah koefisien $s^0$ dalam polinomial karakteristik.
Note - Jika ada elemen baris pada tabel Routh yang memiliki beberapa faktor persekutuan, maka Anda dapat membagi elemen baris dengan faktor tersebut agar penyederhanaannya akan mudah.
Tabel berikut menunjukkan larik Routh dari polinomial karakteristik orde ke- n .
$$a_0s^n+a_1s^{n-1}+a_2s^{n-2}+...+a_{n-1}s^1+a_ns^0$$
$s^n$ |
$a_0$ |
$a_2$ |
$a_4$ |
$a_6$ |
... |
... |
$s^{n-1}$ |
$a_1$ |
$a_3$ |
$a_5$ |
$a_7$ |
... |
... |
$s^{n-2}$ |
$b_1=\frac{a_1a_2-a_3a_0}{a_1}$ |
$b_2=\frac{a_1a_4-a_5a_0}{a_1}$ |
$b_3=\frac{a_1a_6-a_7a_0}{a_1}$ |
... |
... |
... |
$s^{n-3}$ |
$c_1=\frac{b_1a_3-b_2a_1}{b_1}$ |
$c_2=\frac{b_1a_55-b_3a_1}{b_1}$ |
$\vdots$ |
|||
$\vdots $ |
$\vdots$ |
$\vdots$ |
$\vdots$ |
|||
$s^1$ |
$\vdots$ |
$\vdots$ |
||||
$s^0$ |
$a_n$ |
Example
Mari kita cari kestabilan sistem kendali yang memiliki persamaan karakteristik,
$$s^4+3s^3+3s^2+2s+1=0$$
Step 1 - Verifikasi kondisi yang diperlukan untuk stabilitas Routh-Hurwitz.
Semua koefisien polinomial karakteristik, $s^4+3s^3+3s^2+2s+1$positif. Jadi, sistem kendali memenuhi kondisi yang diperlukan.
Step 2 - Bentuk larik Routh untuk polinomial karakteristik yang diberikan.
$s^4$ |
$1$ |
$3$ |
$1$ |
$s^3$ |
$3$ |
$2$ |
|
$s^2$ |
$\frac{(3 \times 3)-(2 \times 1)}{3}=\frac{7}{3}$ |
$\frac{(3 \times 1)-(0 \times 1)}{3}=\frac{3}{3}=1$ |
|
$s^1$ |
$\frac{\left ( \frac{7}{3}\times 2 \right )-(1 \times 3)}{\frac{7}{3}}=\frac{5}{7}$ |
||
$s^0$ |
$1$ |
Step 3 - Verifikasi kondisi yang cukup untuk stabilitas Routh-Hurwitz.
Semua elemen dari kolom pertama dari array Routh bernilai positif. Tidak ada perubahan tanda di kolom pertama dari array Routh. Jadi, sistem kontrolnya stabil.
Kasus Khusus Array Routh
Kami mungkin menemukan dua jenis situasi, saat membentuk tabel Routh. Sulit untuk menyelesaikan tabel Routh dari dua situasi ini.
Dua kasus khusus tersebut adalah -
- Elemen pertama dari setiap baris dari larik Routh adalah nol.
- Semua elemen dari setiap baris dari Routh array adalah nol.
Sekarang mari kita bahas bagaimana mengatasi kesulitan dalam dua kasus ini, satu per satu.
Elemen pertama dari setiap baris dari larik Routh adalah nol
Jika ada baris dari larik Routh yang hanya berisi elemen pertama sebagai nol dan setidaknya salah satu elemen lainnya memiliki nilai bukan nol, maka ganti elemen pertama dengan bilangan bulat positif kecil, $\epsilon$. Dan kemudian lanjutkan proses menyelesaikan tabel Routh. Sekarang, cari jumlah perubahan tanda di kolom pertama tabel Routh dengan mengganti$\epsilon$ cenderung nol.
Example
Mari kita cari kestabilan sistem kendali yang memiliki persamaan karakteristik,
$$s^4+2s^3+s^2+2s+1=0$$
Step 1 - Verifikasi kondisi yang diperlukan untuk stabilitas Routh-Hurwitz.
Semua koefisien polinomial karakteristik, $s^4+2s^3+s^2+2s+1$positif. Jadi, sistem kendali memenuhi kondisi yang diperlukan.
Step 2 - Bentuk larik Routh untuk polinomial karakteristik yang diberikan.
$s^4$ |
$1$ |
$1$ |
$1$ |
$s^3$ |
|
|
|
$s^2$ |
$\frac{(1 \times 1)-(1 \times 1)}{1}=0$ |
$\frac{(1 \times 1)-(0 \times 1)}{1}=1$ |
|
$s^1$ |
|||
$s^0$ |
Baris $s^3$elemen memiliki 2 sebagai faktor persekutuan. Jadi, semua elemen ini dibagi 2.
Special case (i) - Hanya elemen baris pertama $s^2$adalah nol. Jadi, gantilah dengan$\epsilon$ dan melanjutkan proses menyelesaikan tabel Routh.
$s^4$ |
1 |
1 |
1 |
$s^3$ |
1 |
1 |
|
$s^2$ |
$\epsilon$ |
1 |
|
$s^1$ |
$\frac{\left ( \epsilon \times 1 \right )-\left ( 1 \times 1 \right )}{\epsilon}=\frac{\epsilon-1}{\epsilon}$ |
||
$s^0$ |
1 |
Step 3 - Verifikasi kondisi yang cukup untuk stabilitas Routh-Hurwitz.
Sebagai $\epsilon$ cenderung nol, tabel Routh menjadi seperti ini.
$s^4$ |
1 |
1 |
1 |
$s^3$ |
1 |
1 |
|
$s^2$ |
0 |
1 |
|
$s^1$ |
-∞ |
||
$s^0$ |
1 |
Ada dua perubahan tanda di kolom pertama tabel Routh. Makanya, sistem kendali tidak stabil.
Semua Elemen dari setiap baris dari Routh array adalah nol
Dalam kasus ini, ikuti dua langkah berikut -
Tuliskan persamaan bantu, A (s) dari baris, yang berada tepat di atas baris nol.
Diferensialkan persamaan bantu, A (s) terhadap s. Isi baris nol dengan koefisien ini.
Example
Mari kita cari kestabilan sistem kendali yang memiliki persamaan karakteristik,
$$s^5+3s^4+s^3+3s^2+s+3=0$$
Step 1 - Verifikasi kondisi yang diperlukan untuk stabilitas Routh-Hurwitz.
Semua koefisien dari polinomial karakteristik yang diberikan adalah positif. Jadi, sistem kendali memenuhi kondisi yang diperlukan.
Step 2 - Bentuk larik Routh untuk polinomial karakteristik yang diberikan.
$s^5$ |
1 |
1 |
1 |
$s^4$ |
|
|
|
$s^3$ |
$\frac{(1 \times 1)-(1 \times 1)}{1}=0$ |
$\frac{(1 \times 1)-(1 \times 1)}{1}=0$ |
|
$s^2$ |
|||
$s^1$ |
|||
$s^0$ |
Baris $s^4$ elemen memiliki faktor persekutuan 3. Jadi, semua elemen ini dibagi 3.
Special case (ii) - Semua elemen baris $s^3$adalah nol. Jadi, tulislah persamaan bantu, A (s) dari baris tersebut$s^4$.
$$A(s)=s^4+s^2+1$$
Diferensialkan persamaan di atas terhadap s.
$$\frac{\text{d}A(s)}{\text{d}s}=4s^3+2s$$
Tempatkan koefisien ini di baris $s^3$.
$s^5$ |
1 |
1 |
1 |
$s^4$ |
1 |
1 |
1 |
$s^3$ |
|
|
|
$s^2$ |
$\frac{(2 \times 1)-(1 \times 1)}{2}=0.5$ |
$\frac{(2 \times 1)-(0 \times 1)}{2}=1$ |
|
$s^1$ |
$\frac{(0.5 \times 1)-(1 \times 2)}{0.5}=\frac{-1.5}{0.5}=-3$ |
||
$s^0$ |
1 |
Step 3 - Verifikasi kondisi yang cukup untuk stabilitas Routh-Hurwitz.
Ada dua perubahan tanda di kolom pertama tabel Routh. Makanya, sistem kendali tidak stabil.
Dalam kriteria stabilitas Routh-Hurwitz, kita dapat mengetahui apakah kutub loop tertutup berada di setengah kiri bidang 's' atau di paruh kanan bidang 's' atau di sumbu imajiner. Jadi, kami tidak dapat menemukan sifat dari sistem kontrol. Untuk mengatasi keterbatasan tersebut, ada teknik yang disebut lokus akar. Kami akan membahas teknik ini dalam dua bab berikutnya.
Pada diagram lokus akar, kita dapat mengamati jalur kutub loop tertutup. Oleh karena itu, kami dapat mengidentifikasi sifat dari sistem kendali. Pada teknik ini akan digunakan fungsi transfer loop terbuka untuk mengetahui kestabilan sistem kendali loop tertutup.
Dasar-dasar Lokus Root
Lokus Akar adalah lokus akar persamaan karakteristik dengan memvariasikan penguatan sistem K dari nol hingga tak terbatas.
Kita tahu bahwa persamaan karakteristik dari sistem kendali loop tertutup adalah
$$1+G(s)H(s)=0$$
Kami bisa mewakili $G(s)H(s)$ sebagai
$$G(s)H(s)=K\frac{N(s)}{D(s)}$$
Dimana,
K mewakili faktor pengali
N (s) merupakan istilah pembilang memiliki (faktor) n th rangka polinomial dari 's'.
D (s) merupakan istilah penyebut memiliki (faktor) m th rangka polinomial dari 's'.
Pengganti, $G(s)H(s)$ nilai dalam persamaan karakteristik.
$$1+k\frac{N(s)}{D(s)}=0$$
$$\Rightarrow D(s)+KN(s)=0$$
Case 1 − K = 0
Jika $K=0$, kemudian $D(s)=0$.
Artinya, kutub loop tertutup sama dengan kutub loop terbuka jika K bernilai nol.
Case 2 − K = ∞
Tulis ulang persamaan karakteristik di atas sebagai
$$K\left(\frac{1}{K}+\frac{N(s)}{D(s)} \right )=0 \Rightarrow \frac{1}{K}+\frac{N(s)}{D(s)}=0$$
Pengganti, $K = \infty$ dalam persamaan di atas.
$$\frac{1}{\infty}+\frac{N(s)}{D(s)}=0 \Rightarrow \frac{N(s)}{D(s)}=0 \Rightarrow N(s)=0$$
Jika $K=\infty$, kemudian $N(s)=0$. Ini berarti kutub loop tertutup sama dengan nol loop terbuka ketika K tak terhingga.
Dari dua kasus di atas, kita dapat menyimpulkan bahwa cabang lokus akar dimulai pada kutub loop terbuka dan berakhir pada nol loop terbuka.
Kondisi Sudut dan Kondisi Besaran
Titik-titik pada cabang lokus akar memenuhi kondisi sudut. Jadi kondisi sudut digunakan untuk mengetahui apakah titik tersebut ada pada cabang lokus akar atau tidak. Kita dapat mencari nilai K untuk titik-titik pada cabang lokus akar dengan menggunakan kondisi magnitudo. Jadi, kita bisa menggunakan kondisi magnitudo untuk titik-titik tersebut, dan ini memenuhi kondisi sudut.
Persamaan karakteristik sistem kendali loop tertutup adalah
$$1+G(s)H(s)=0$$
$$\Rightarrow G(s)H(s)=-1+j0$$
Itu phase angle dari $G(s)H(s)$ adalah
$$\angle G(s)H(s)=\tan^{-1}\left ( \frac{0}{-1} \right )=(2n+1)\pi$$
Itu angle conditionadalah titik di mana sudut fungsi transfer loop terbuka adalah kelipatan ganjil 180 0 .
Besaran $G(s)H(s)$ adalah -
$$|G(s)H(s)|=\sqrt {(-1)^2+0^2}=1$$
Kondisi magnitudo adalah titik (yang memenuhi kondisi sudut) di mana besarnya fungsi transfer loop terbuka adalah satu.
Itu root locusadalah representasi grafis dalam domain s dan simetris terhadap sumbu sebenarnya. Karena kutub dan nol loop terbuka ada di domain-s yang memiliki nilai sebagai pasangan konjugasi nyata atau kompleks. Dalam bab ini, mari kita bahas bagaimana membangun (menggambar) lokus akar.
Aturan untuk Pembangunan Lokus Akar
Ikuti aturan ini untuk membangun lokus root.
Rule 1 - Cari kutub lingkaran terbuka dan nol di bidang 's'.
Rule 2 - Temukan jumlah cabang lokus akar.
Kita tahu bahwa cabang lokus akar dimulai pada kutub loop terbuka dan berakhir pada nol loop terbuka. Jadi, banyaknya cabang lokus akarN sama dengan jumlah kutub loop terbuka hingga P atau jumlah nol loop terbuka hingga Z, mana yang lebih besar.
Secara matematis, kita dapat menuliskan jumlah cabang lokus akar N sebagai
$N=P$ jika $P\geq Z$
$N=Z$ jika $P<Z$
Rule 3 - Identifikasi dan gambar real axis root locus branches.
Jika sudut fungsi transfer loop terbuka pada suatu titik merupakan kelipatan ganjil 180 0 , maka titik tersebut berada pada lokus akar. Jika ada angka ganjil dari kutub loop terbuka dan angka nol di sisi kiri suatu titik pada sumbu nyata, maka titik tersebut berada pada cabang lokus akar. Oleh karena itu, cabang titik yang memenuhi syarat ini adalah sumbu nyata dari cabang lokus akar.
Rule 4 - Temukan sentroid dan sudut asimtot.
Jika $P = Z$, maka semua cabang lokus akar mulai dari kutub loop terbuka terbatas dan berakhir pada nol loop terbuka terbatas.
Jika $P > Z$ , kemudian $Z$ Jumlah cabang lokus akar dimulai pada kutub loop terbuka berhingga dan berakhir pada nol loop terbuka berhingga dan $P − Z$ Jumlah cabang lokus akar dimulai pada kutub loop terbuka berhingga dan berakhir pada nol loop terbuka tak terhingga.
Jika $P < Z$ , maka nomor P dari cabang lokus akar dimulai pada kutub loop terbuka hingga dan berakhir pada nol loop terbuka hingga dan $Z − P$ jumlah cabang lokus akar mulai dari kutub loop terbuka tak terhingga dan berakhir pada nol loop terbuka hingga.
Jadi, beberapa cabang lokus akar mendekati tak terhingga, kapan $P \neq Z$. Asimtot memberikan arah cabang lokus akar ini. Titik persimpangan asimtot pada sumbu nyata dikenal sebagaicentroid.
Kami dapat menghitung centroid α dengan menggunakan rumus ini,
$\alpha = \frac{\sum Real\: part\: of\: finite\: open\: loop\: poles\:-\sum Real\: part\: of\: finite\: open\: loop\: zeros}{P-Z}$
Rumus sudut asymptotes θ adalah
$$\theta=\frac{(2q+1)180^0}{P-Z}$$
Dimana,
$$q=0,1,2,....,(P-Z)-1$$
Rule 5 - Temukan titik potong cabang lokus akar dengan sumbu imajiner.
Kita dapat menghitung titik di mana cabang lokus akar memotong sumbu imajiner dan nilai K pada saat itu dengan menggunakan metode array Routh dan khusus case (ii).
Jika semua elemen dari sembarang baris dari array Routh adalah nol, maka cabang lokus akar memotong sumbu imajiner dan sebaliknya.
Identifikasi baris sedemikian rupa sehingga jika kita menjadikan elemen pertama sebagai nol, maka elemen seluruh baris adalah nol. Temukan nilaiK untuk kombinasi ini.
Gantikan ini Knilai dalam persamaan bantu. Anda akan mendapatkan titik potong cabang lokus akar dengan sumbu imajiner.
Rule 6 - Temukan poin Break-away dan Break-in.
Jika terdapat cabang lokus akar sumbu nyata antara dua kutub loop terbuka, maka akan ada a break-away point di antara dua kutub loop terbuka ini.
Jika terdapat cabang lokus akar sumbu nyata antara dua nol loop terbuka, maka akan ada a break-in point di antara dua angka nol loop terbuka ini.
Note - Titik break-away dan break-in hanya ada pada cabang lokus akar sumbu nyata.
Ikuti langkah-langkah berikut untuk menemukan titik break-away dan break-in.
Menulis $K$ dengan kondisi $s$ dari persamaan karakteristik $1 + G(s)H(s) = 0$.
Membedakan $K$terhadap s dan membuatnya sama dengan nol. Gantikan nilai-nilai ini$s$ dalam persamaan di atas.
Nilai $s$ untuk yang $K$ nilai positif adalah break points.
Rule 7 - Temukan sudut keberangkatan dan sudut kedatangan.
Sudut berangkat dan sudut datang dapat dihitung masing-masing pada kutub loop terbuka konjugat kompleks dan nol loop terbuka konjugat kompleks.
Rumus untuk angle of departure $\phi_d$ adalah
$$\phi_d=180^0-\phi$$
Rumus untuk angle of arrival $\phi_a$ adalah
$$\phi_a=180^0+\phi$$
Dimana,
$$\phi=\sum \phi_P-\sum \phi_Z$$
Contoh
Sekarang mari kita menggambar lokus root dari sistem kontrol yang memiliki fungsi transfer loop terbuka, $G(s)H(s)=\frac{K}{s(s+1)(s+5)}$
Step 1 - Fungsi transfer loop terbuka yang diberikan memiliki tiga kutub di $s = 0, s = −1$ dan $s = −5$. Tidak ada nol. Oleh karena itu, jumlah cabang lokus akar sama dengan jumlah kutub fungsi transfer loop terbuka.
$$N=P=3$$

Ketiga kutub tersebut berada ditunjukkan pada gambar di atas. Ruas garis di antara$s = −1$ dan $s = 0$adalah salah satu cabang lokus akar pada sumbu nyata. Dan cabang lain dari lokus akar pada sumbu nyata adalah ruas garis di sebelah kiri$s = −5$.
Step 2 - Kami akan mendapatkan nilai sentroid dan sudut asimtot dengan menggunakan rumus yang diberikan.
Centroid $\alpha = −2$
Sudut asimtot adalah $\theta = 60^0,180^0$ dan $300^0$.
Sentroid dan tiga asimtot ditunjukkan pada gambar berikut.

Step 3 - Karena dua asimtot memiliki sudut $60^0$ dan $300^0$, dua cabang lokus akar memotong sumbu imajiner. Dengan menggunakan metode Routh array dan kasus khusus (ii), cabang lokus akar memotong sumbu imajiner di$j\sqrt{5}$ dan $−j\sqrt{5}$.
Akan ada satu titik break-away pada cabang lokus akar sumbu nyata antara kutub-kutub tersebut $s = −1$ dan $s = 0$. Dengan mengikuti prosedur yang diberikan untuk penghitungan break-away point, kita akan mendapatkannya sebagai$s = −0.473$.
Diagram lokus akar untuk sistem kontrol yang diberikan ditunjukkan pada gambar berikut.

Dengan cara ini, Anda dapat menggambar diagram lokus akar dari sistem kontrol apa pun dan mengamati pergerakan kutub dari fungsi transfer loop tertutup.
Dari diagram lokus akar, kita dapat mengetahui kisaran nilai K untuk berbagai jenis redaman.
Efek Menambahkan Kutub Loop Terbuka dan Nol pada Lokus Root
Lokus akar dapat digeser ‘s’ plane dengan menambahkan kutub loop terbuka dan nol loop terbuka.
Jika kita menyertakan sebuah tiang dalam fungsi transfer loop terbuka, maka beberapa cabang lokus akar akan bergerak menuju separuh bidang kanan 's'. Karena itu, rasio redamannya$\delta$menurun. Yang menyiratkan, frekuensi teredam$\omega_d$ meningkat dan spesifikasi domain waktu seperti waktu tunda $t_d$, waktu bangun $t_r$ dan waktu puncak $t_p$mengurangi. Tapi, itu mempengaruhi stabilitas sistem.
Jika kita menyertakan nol dalam fungsi transfer loop terbuka, maka beberapa cabang lokus akar akan bergerak ke arah separuh kiri bidang 's'. Sehingga akan meningkatkan stabilitas sistem kendali. Dalam hal ini, rasio redaman$\delta$meningkat. Yang menyiratkan, frekuensi teredam$\omega_d$ menurun dan spesifikasi domain waktu seperti waktu tunda $t_d$, waktu bangun $t_r$ dan waktu puncak $t_p$ meningkat.
Jadi, berdasarkan kebutuhan, kita bisa memasukkan (menambahkan) kutub loop terbuka atau nol ke fungsi transfer.
Kita telah membahas analisis respons waktu dari sistem kontrol dan spesifikasi domain waktu dari sistem kontrol orde dua. Dalam bab ini, mari kita bahas analisis respons frekuensi dari sistem kontrol dan spesifikasi domain frekuensi dari sistem kontrol orde dua.
Apa itu Respon Frekuensi?
Respons sistem dapat dipartisi menjadi respons transien dan respons kondisi tunak. Kita dapat menemukan respon transien dengan menggunakan integral Fourier. Respons kondisi tunak dari sistem untuk sinyal sinusoidal input dikenal sebagaifrequency response. Dalam bab ini, kita hanya akan fokus pada respons kondisi mapan.
Jika sinyal sinusoidal diterapkan sebagai masukan ke sistem Linear Time-Invariant (LTI), maka ia menghasilkan keluaran kondisi tunak, yang juga merupakan sinyal sinusoidal. Sinyal sinusoidal input dan output memiliki frekuensi yang sama, tetapi amplitudo dan sudut fasa berbeda.
Biarkan sinyal input menjadi -
$$r(t)=A\sin(\omega_0t)$$
Fungsi transfer loop terbuka akan menjadi -
$$G(s)=G(j\omega)$$
Kami bisa mewakili $G(j\omega)$ dalam hal besaran dan fasa seperti yang ditunjukkan di bawah ini.
$$G(j\omega)=|G(j\omega)| \angle G(j\omega)$$
Pengganti, $\omega = \omega_0$ dalam persamaan di atas.
$$G(j\omega_0)=|G(j\omega_0)| \angle G(j\omega_0)$$
Sinyal keluarannya adalah
$$c(t)=A|G(j\omega_0)|\sin(\omega_0t + \angle G(j\omega_0))$$
Itu amplitude sinyal sinusoidal keluaran diperoleh dengan mengalikan amplitudo sinyal sinusoidal masukan dan besarnya $G(j\omega)$ di $\omega = \omega_0$.
Itu phase dari sinyal sinusoidal keluaran diperoleh dengan menambahkan fasa dari sinyal sinusoidal masukan dan fasa $G(j\omega)$ di $\omega = \omega_0$.
Dimana,
A adalah amplitudo dari sinyal sinusoidal masukan.
ω0 adalah frekuensi sudut dari sinyal sinusoidal masukan.
Kita bisa menulis, frekuensi sudut $\omega_0$ seperti gambar dibawah.
$$\omega_0=2\pi f_0$$
Sini, $f_0$adalah frekuensi dari sinyal sinusoidal masukan. Demikian pula, Anda dapat mengikuti prosedur yang sama untuk sistem kontrol loop tertutup.
Spesifikasi Domain Frekuensi
Spesifikasi domain frekuensi adalah resonant peak, resonant frequency and bandwidth.
Pertimbangkan fungsi transfer dari sistem kontrol loop tertutup orde dua sebagai,
$$T(s)=\frac{C(s)}{R(s)}=\frac{\omega_n^2}{s^2+2\delta\omega_ns+\omega_n^2}$$
Pengganti, $s = j\omega$ dalam persamaan di atas.
$$T(j\omega)=\frac{\omega_n^2}{(j\omega)^2+2\delta\omega_n(j\omega)+\omega_n^2}$$
$$\Rightarrow T(j\omega)=\frac{\omega_n^2}{-\omega^2+2j\delta\omega\omega_n+\omega_n^2}=\frac{\omega_n^2}{\omega_n^2\left ( 1-\frac{\omega^2}{\omega_n^2}+\frac{2j\delta\omega}{\omega_n} \right )}$$
$$\Rightarrow T(j\omega)=\frac{1}{\left ( 1-\frac{\omega^2}{\omega_n^2} \right )+j\left ( \frac{2\delta\omega}{\omega_n} \right )}$$
Membiarkan, $\frac{\omega}{\omega_n}=u$ Gantikan nilai ini dalam persamaan di atas.
$$T(j\omega)=\frac{1}{(1-u^2)+j(2\delta u)}$$
Besaran $T(j\omega)$ adalah -
$$M=|T(j\omega)|=\frac{1}{\sqrt {(1-u^2)^2+(2\delta u)^2}}$$
Fase dari $T(j\omega)$ adalah -
$$\angle T(j\omega)=-tan^{-1}\left( \frac{2\delta u}{1-u^2} \right )$$
Frekuensi resonansi
Ini adalah frekuensi dimana besaran respon frekuensi memiliki nilai puncak untuk pertama kalinya. Ini dilambangkan dengan$\omega_r$. Di$\omega = \omega_r$, turunan pertama dari besaran $T(j\omega)$ adalah nol.
Membedakan $M$ dengan hormat $u$.
$$\frac{\text{d}M}{\text{d}u}=-\frac{1}{2}\left [ (1-u^2)^2+(2\delta u)^2 \right ]^{\frac{-3}{2}} \left [2(1-u^2)(-2u)+2(2\delta u)(2\delta) \right ]$$
$$\Rightarrow \frac{\text{d}M}{\text{d}u}=-\frac{1}{2}\left [ (1-u^2)^2+(2\delta u)^2 \right ]^{\frac{-3}{2}} \left [4u(u^2-1 +2\delta^2) \right ]$$
Pengganti, $u=u_r$ dan $\frac{\text{d}M}{\text{d}u}==0$ dalam persamaan di atas.
$$0=-\frac{1}{2}\left [ (1-u_r^2)^2+(2\delta u_r)^2 \right ]^{-\frac{3}{2}}\left [ 4u_r(u_r^2-1 +2\delta^2) \right ]$$
$$\Rightarrow 4u_r(u_r^2-1 +2\delta^2)=0$$
$$\Rightarrow u_r^2-1+2\delta^2=0$$
$$\Rightarrow u_r^2=1-2\delta^2$$
$$\Rightarrow u_r=\sqrt{1-2\delta^2}$$
Pengganti, $u_r=\frac{\omega_r}{\omega_n}$ dalam persamaan di atas.
$$\frac{\omega_r}{\omega_n}=\sqrt{1-2\delta^2}$$
$$\Rightarrow \omega_r=\omega_n \sqrt{1-2\delta^2}$$
Puncak Resonan
Ini adalah nilai puncak (maksimum) dari besaran $T(j\omega)$. Ini dilambangkan dengan$M_r$.
Di $u = u_r$, Besaran $T(j\omega)$ adalah -
$$M_r=\frac{1}{\sqrt{(1-u_r^2)^2+(2\delta u_r)^2}}$$
Pengganti, $u_r = \sqrt{1 − 2\delta^2}$ dan $1 − u_r^2 = 2\delta^2$ dalam persamaan di atas.
$$M_r=\frac{1}{\sqrt{(2\delta^2)^2+(2\delta \sqrt{1-2\delta^2})^2}}$$
$$\Rightarrow M_r=\frac{1}{2\delta \sqrt {1-\delta^2}}$$
Puncak resonansi dalam respons frekuensi sesuai dengan overshoot puncak dalam respons transien domain waktu untuk nilai rasio redaman tertentu $\delta$. Jadi, puncak resonansi dan overshoot puncak berkorelasi satu sama lain.
Bandwidth
Ini adalah kisaran frekuensi yang besarnya $T(j\omega)$ turun menjadi 70,7% dari nilai frekuensi nolnya.
Di $\omega = 0$, nilai dari $u$ akan menjadi nol.
Pengganti, $u = 0$ di M.
$$M=\frac{1}{\sqrt {(1-0^2)^2+(2\delta(0))^2}}=1$$
Oleh karena itu, besarnya $T(j\omega)$ adalah satu di $\omega = 0$.
Pada frekuensi 3-dB, besarnya $T(j\omega)$ akan menjadi 70,7% dari $T(j\omega)$ di $\omega = 0$.
saya makan $\omega = \omega_B, M = 0.707(1) = \frac{1}{\sqrt{2}}$
$$\Rightarrow M=\frac{1}{\sqrt{2}}=\frac{1}{\sqrt{(1-u_b^2)^2+(2\delta u_b)^2}}$$
$$\Rightarrow 2=(1-u_b^2)^2+(2\delta)^2 u_b^2$$
Membiarkan, $u_b^2=x$
$$\Rightarrow 2=(1-x)^2+(2\delta)^2 x$$
$$\Rightarrow x^2+(4\delta^2-2)x-1=0$$
$$\Rightarrow x=\frac{-(4\delta^2 -2)\pm \sqrt{(4\delta^2-2)^2+4}}{2}$$
Pertimbangkan hanya nilai positif dari x.
$$x=1-2\delta^2+\sqrt {(2\delta^2-1)^2+1}$$
$$\Rightarrow x=1-2\delta^2+\sqrt {(2-4\delta^2+4\delta^4)}$$
Pengganti, $x=u_b^2=\frac{\omega_b^2}{\omega_n^2}$
$$\frac{\omega_b^2}{\omega_n^2}=1-2\delta^2+\sqrt {(2-4\delta^2+4\delta^4)}$$
$$\Rightarrow \omega_b=\omega_n \sqrt {1-2\delta^2+\sqrt {(2-4\delta^2+4\delta^4)}}$$
Bandwidth $\omega_b$ dalam respon frekuensi berbanding terbalik dengan waktu naik $t_r$ dalam respon sementara domain waktu.
Bode plot atau diagram Bode terdiri dari dua plot -
- Plot besarnya
- Plot fase
Di kedua plot, sumbu x mewakili frekuensi sudut (skala logaritmik). Sedangkan yaxis merepresentasikan besaran (skala linier) fungsi transfer loop terbuka pada plot magnitudo dan sudut fasa (skala linier) dari fungsi transfer loop terbuka pada plot fase.
Itu magnitude dari fungsi transfer loop terbuka dalam dB adalah -
$$M=20\: \log|G(j\omega)H(j\omega)|$$
Itu phase angle dari fungsi transfer loop terbuka dalam derajat adalah -
$$\phi=\angle G(j\omega)H(j\omega)$$
Note - Basis logaritma adalah 10.
Dasar dari Bode Plots
Tabel berikut menunjukkan kemiringan, besaran dan nilai sudut fase dari istilah-istilah yang ada dalam fungsi transfer loop terbuka. Data ini berguna saat menggambar plot Bode.
| Jenis istilah | G (jω) H (jω) | Kemiringan (dB / des) | Besaran (dB) | Sudut fase (derajat) |
|---|---|---|---|---|
Konstan |
$K$ |
$0$ |
$20 \log K$ |
$0$ |
Nol di asalnya |
$j\omega$ |
$20$ |
$20 \log \omega$ |
$90$ |
'n' nol di asalnya |
$(j\omega)^n$ |
$20\: n$ |
$20\: n \log \omega$ |
$90\: n$ |
Kutub di asal |
$\frac{1}{j\omega}$ |
$-20$ |
$-20 \log \omega$ |
$-90 \: or \: 270$ |
kutub 'n' di asalnya |
$\frac{1}{(j\omega)^n}$ |
$-20\: n$ |
$-20 \: n \log \omega$ |
$-90 \: n \: or \: 270 \: n$ |
Nol sederhana |
$1+j\omega r$ |
$20$ |
$0\: for\: \omega < \frac{1}{r}$ $20\: \log \omega r\: for \: \omega > \frac{1}{r}$ |
$0 \: for \: \omega < \frac{1}{r}$ $90 \: for \: \omega > \frac{1}{r}$ |
Tiang sederhana |
$\frac{1}{1+j\omega r}$ |
$-20$ |
$0\: for\: \omega < \frac{1}{r}$ $-20\: \log \omega r\: for\: \omega > \frac{1}{r}$ |
$0 \: for \: \omega < \frac{1}{r}$ $-90\: or \: 270 \: for\: \omega > \frac{1}{r}$ |
Istilah turunan orde kedua |
$\omega_n^2\left ( 1-\frac{\omega^2}{\omega_n^2}+\frac{2j\delta\omega}{\omega_n} \right )$ |
$40$ |
$40\: \log\: \omega_n\: for \: \omega < \omega_n$ $20\: \log\:(2\delta\omega_n^2)\: for \: \omega=\omega_n$ $40 \: \log \: \omega\:for \:\omega > \omega_n$ |
$0 \: for \: \omega < \omega_n$ $90 \: for \: \omega = \omega_n$ $180 \: for \: \omega > \omega_n$ |
Suku integral orde dua |
$\frac{1}{\omega_n^2\left ( 1-\frac{\omega^2}{\omega_n^2}+\frac{2j\delta\omega}{\omega_n} \right )}$ |
$-40$ |
$-40\: \log\: \omega_n\: for \: \omega < \omega_n$ $-20\: \log\:(2\delta\omega_n^2)\: for \: \omega=\omega_n$ $-40 \: \log \: \omega\:for \:\omega > \omega_n$ |
$-0 \: for \: \omega < \omega_n$ $-90 \: for \: \omega = \omega_n$ $-180 \: for \: \omega > \omega_n$ |
Pertimbangkan fungsi transfer loop terbuka $G(s)H(s) = K$.
Besarnya $M = 20\: \log K$ dB
Sudut fase $\phi = 0$ derajat
Jika $K = 1$, maka besarnya 0 dB.
Jika $K > 1$, maka besarnya akan positif.
Jika $K < 1$, maka besarnya akan menjadi negatif.
Gambar berikut menunjukkan plot Bode yang sesuai.
Plot magnitudo adalah garis horizontal, yang tidak bergantung pada frekuensi. Garis 0 dB sendiri merupakan plot magnitudo jika nilai K adalah satu. Untuk nilai K positif, garis horizontal akan bergeser$20 \:\log K$dB di atas garis 0 dB. Untuk nilai negatif K, garis horizontal akan bergeser$20\: \log K$dB di bawah garis 0 dB. Garis derajat nol itu sendiri adalah plot fase untuk semua nilai positif K.
Pertimbangkan fungsi transfer loop terbuka $G(s)H(s) = s$.
Besarnya $M = 20 \log \omega$ dB
Sudut fase $\phi = 90^0$
Di $\omega = 0.1$ rad / detik, besarnya -20 dB.
Di $\omega = 1$ rad / detik, besarnya 0 dB.
Di $\omega = 10$ rad / detik, besarnya 20 dB.
Gambar berikut menunjukkan plot Bode yang sesuai.


Plot magnitudo adalah sebuah garis yang memiliki kemiringan 20 dB / des. Baris ini dimulai pada$\omega = 0.1$rad / detik memiliki magnitudo -20 dB dan berlanjut pada kemiringan yang sama. Ini menyentuh garis 0 dB pada$\omega = 1$rad / dtk. Dalam hal ini, plot fase adalah 90 0 garis.
Pertimbangkan fungsi transfer loop terbuka $G(s)H(s) = 1 + s\tau$.
Besarnya $M = 20\: log \sqrt{1 + \omega^2\tau^2}$ dB
Sudut fase $\phi = \tan^{-1}\omega\tau$ derajat
Untuk $ω < \frac{1}{\tau}$ , besarnya 0 dB dan sudut fasa 0 derajat.
Untuk $\omega > \frac{1}{\tau}$ , besarnya $20\: \log \omega\tau$dB dan sudut fasa adalah 90 0 .
Gambar berikut menunjukkan plot Bode yang sesuai.

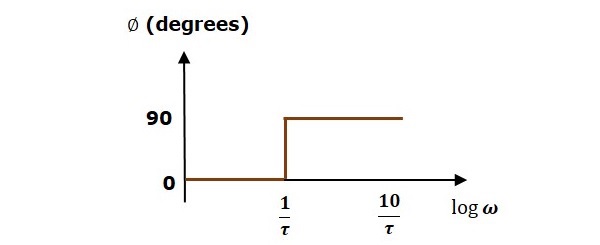
Plot magnitudo memiliki magnitudo 0 dB upto $\omega=\frac{1}{\tau}$rad / dtk. Dari$\omega = \frac{1}{\tau}$rad / detik, memiliki kemiringan 20 dB / des. Dalam hal ini, plot fasa memiliki sudut fasa 0 derajat ke atas$\omega = \frac{1}{\tau}$rad / detik dan dari sini, sudut fasa adalah 90 0 . Plot Bode ini disebutasymptotic Bode plot.
Karena plot magnitudo dan fase direpresentasikan dengan garis lurus, maka plot Exact Bode menyerupai plot Bode asimtotik. Satu-satunya perbedaan adalah bahwa plot Exact Bode akan memiliki kurva sederhana, bukan garis lurus.
Demikian pula, Anda dapat menggambar plot Bode untuk istilah lain dari fungsi transfer loop terbuka yang diberikan dalam tabel.
Dalam bab ini, mari kita pahami secara detail bagaimana membuat (menggambar) plot Bode.
Aturan untuk Konstruksi Plot Bode
Ikuti aturan ini saat membuat plot Bode.
Mewakili fungsi transfer loop terbuka dalam bentuk konstanta waktu standar.
Pengganti, $s=j\omega$ dalam persamaan di atas.
Temukan frekuensi sudut dan atur dalam urutan menaik.
Pertimbangkan frekuensi mulai dari plot Bode sebagai 1/10 th dari frekuensi minimum sudut atau 0,1 rad / sec mana yang nilai yang lebih kecil dan menarik plot Bode upto 10 kali frekuensi sudut maksimum.
Gambarkan plot besarnya untuk setiap suku dan gabungkan plot ini dengan benar.
Gambarkan plot fase untuk setiap suku dan gabungkan plot-plot ini dengan benar.
Note - Frekuensi sudut adalah frekuensi terjadinya perubahan kemiringan plot magnitudo.
Contoh
Pertimbangkan fungsi transfer loop terbuka dari sistem kontrol loop tertutup
$$G(s)H(s)=\frac{10s}{(s+2)(s+5)}$$
Mari kita ubah fungsi transfer loop terbuka ini menjadi bentuk konstanta waktu standar.
$$G(s)H(s)=\frac{10s}{2\left( \frac{s}{2}+1 \right )5 \left( \frac{s}{5}+1 \right )}$$
$$\Rightarrow G(s)H(s)=\frac{s}{\left( 1+\frac{s}{2} \right )\left( 1+\frac{s}{5} \right )}$$
Jadi, kita bisa menggambar plot Bode di semi log sheet menggunakan aturan yang disebutkan sebelumnya.
Analisis Stabilitas menggunakan Bode Plots
Dari plot Bode, kita dapat mengatakan apakah sistem kontrol stabil, stabil secara marginal atau tidak stabil berdasarkan nilai-nilai parameter tersebut.
- Dapatkan frekuensi silang dan frekuensi lintas fase
- Dapatkan margin dan margin fase
Frekuensi Penyeberangan Fase
Frekuensi di mana plot fase memiliki fase -180 0 dikenal sebagaiphase cross over frequency. Ini dilambangkan dengan$\omega_{pc}$. Satuan frekuensi lintas fase adalahrad/sec.
Dapatkan Frekuensi Silang
Frekuensi di mana plot magnitudo memiliki besaran nol dB dikenal sebagai gain cross over frequency. Ini dilambangkan dengan$\omega_{gc}$. Satuan frekuensi lintas gain adalahrad/sec.
Stabilitas sistem kontrol berdasarkan hubungan antara frekuensi lintas fase dan frekuensi gain lintas di bawah ini.
Jika fase melintasi frekuensi $\omega_{pc}$ lebih besar dari gain lintas frekuensi $\omega_{gc}$, maka sistem kontrolnya stable.
Jika fase melintasi frekuensi $\omega_{pc}$ sama dengan gain lintas frekuensi $\omega_{gc}$, maka sistem kontrolnya marginally stable.
Jika fase melintasi frekuensi $\omega_{pc}$ lebih kecil dari gain lintas frekuensi $\omega_{gc}$, maka sistem kontrolnya unstable.
Dapatkan Margin
Dapatkan margin $GM$ sama dengan negatif besarnya dalam dB pada frekuensi lintas fase.
$$GM=20\log\left( \frac{1}{M_{pc}}\right )=20logM_{pc}$$
Dimana, $M_{pc}$adalah besarnya frekuensi lintas fase. Satuan margin keuntungan (GM) adalahdB.
Fase Margin
Rumus untuk fasa margin $PM$ adalah
$$PM=180^0+\phi_{gc}$$
Dimana, $\phi_{gc}$adalah sudut fasa pada frekuensi lintas gain. Satuan fasa adalahdegrees.
Stabilitas sistem kontrol berdasarkan hubungan antara margin keuntungan dan margin fase tercantum di bawah ini.
Jika keduanya mendapatkan margin keuntungan $GM$ dan margin fase $PM$ positif, maka sistem kontrolnya stable.
Jika keduanya mendapatkan margin keuntungan $GM$ dan margin fase $PM$ sama dengan nol, maka sistem kontrolnya adalah marginally stable.
Jika mendapatkan margin $GM$ dan / atau margin fase $PM$ adalah / negatif, maka sistem kontrolnya adalah unstable.
Pada bab sebelumnya, kita telah membahas plot Bode. Di sana, kami memiliki dua plot terpisah untuk besaran dan fasa sebagai fungsi frekuensi. Sekarang mari kita bahas tentang plot kutub. Polar plot adalah plot yang dapat ditarik antara besaran dan fasa. Di sini, besaran diwakili oleh nilai normal saja.
Bentuk kutub dari $G(j\omega)H(j\omega)$ adalah
$$G(j\omega)H(j\omega)=|G(j\omega)H(j\omega)| \angle G(j\omega)H(j\omega)$$
Itu Polar plot adalah sebuah plot, yang dapat ditarik antara besar dan sudut fase $G(j\omega)H(j\omega)$ dengan memvariasikan $\omega$dari nol hingga ∞. Lembar grafik kutub ditunjukkan pada gambar berikut.

Lembar grafik ini terdiri dari lingkaran konsentris dan garis radial. Ituconcentric circles dan radial linesmewakili besaran dan sudut fase masing-masing. Sudut-sudut ini diwakili oleh nilai-nilai positif dalam arah anti-jam. Demikian pula, kita dapat merepresentasikan sudut dengan nilai negatif searah jarum jam. Misalnya, sudut 270 0 berlawanan arah jarum jam sama dengan sudut −90 0 searah jarum jam.
Aturan untuk Menggambar Polar Plots
Ikuti aturan ini untuk merencanakan plot kutub.
Pengganti, $s = j\omega$ dalam fungsi transfer loop terbuka.
Tuliskan ekspresi besaran dan fase $G(j\omega)H(j\omega)$.
Tentukan besar awal dan fase dari $G(j\omega)H(j\omega)$ dengan mengganti $\omega = 0$. Jadi, plot kutub dimulai dengan besaran ini dan sudut fasa.
Tentukan besaran akhir dan fase dari $G(j\omega)H(j\omega)$ dengan mengganti $\omega = \infty$. Jadi, kutub plot berakhir dengan besaran ini dan sudut fasa.
Periksa apakah plot kutub memotong sumbu nyata, dengan membuat suku imajiner dari $G(j\omega)H(j\omega)$ sama dengan nol dan temukan nilai dari $\omega$.
Periksa apakah plot kutub memotong sumbu imajiner, dengan membuat suku riil $G(j\omega)H(j\omega)$ sama dengan nol dan temukan nilai dari $\omega$.
Untuk menggambar plot kutub dengan lebih jelas, tentukan besaran dan fasa $G(j\omega)H(j\omega)$ dengan mempertimbangkan nilai lain dari $\omega$.
Contoh
Pertimbangkan fungsi transfer loop terbuka dari sistem kontrol loop tertutup.
$$G(s)H(s)=\frac{5}{s(s+1)(s+2)}$$
Mari kita menggambar plot kutub untuk sistem kontrol ini menggunakan aturan di atas.
Step 1 - Pengganti, $s = j\omega$ dalam fungsi transfer loop terbuka.
$$G(j\omega)H(j\omega)=\frac{5}{j\omega(j\omega+1)(j\omega+2)}$$
Besarnya fungsi transfer loop terbuka adalah
$$M=\frac{5}{\omega(\sqrt{\omega^2+1})(\sqrt{\omega^2+4})}$$
Sudut fase dari fungsi transfer loop terbuka adalah
$$\phi=-90^0-\tan^{-1}\omega-\tan^{-1}\frac{\omega}{2}$$
Step 2 - Tabel berikut menunjukkan besaran dan sudut fase dari fungsi transfer loop terbuka pada $\omega = 0$ rad / detik dan $\omega = \infty$ rad / dtk.
| Frekuensi (rad / detik) | Besarnya | Sudut fase (derajat) |
|---|---|---|
| 0 | ∞ | -90 atau 270 |
| ∞ | 0 | -270 atau 90 |
Jadi, plot kutub dimulai pada (∞, −90 0 ) dan berakhir pada (0, −270 0 ). Suku pertama dan kedua di dalam tanda kurung masing-masing menunjukkan besaran dan sudut fase.
Step 3- Berdasarkan koordinat kutub awal dan akhir, plot kutub ini akan memotong sumbu nyata negatif. Sudut fase yang terkait dengan sumbu nyata negatif adalah −180 0 atau 180 0 . Jadi, dengan menyamakan sudut fase dari fungsi transfer loop terbuka ke −180 0 atau 180 0 , kita akan mendapatkan$\omega$ nilai sebagai $\sqrt{2}$.
Dengan mengganti $\omega = \sqrt{2}$ dalam besarnya fungsi transfer loop terbuka, kita akan mendapatkan $M = 0.83$. Oleh karena itu, plot kutub memotong sumbu nyata negatif ketika$\omega = \sqrt{2}$dan koordinat kutubnya adalah (0.83, −180 0 ).
Jadi, kita dapat menggambar plot kutub dengan informasi di atas pada lembar grafik kutub.
Plot Nyquist adalah kelanjutan dari plot kutub untuk mencari kestabilan sistem kontrol loop tertutup dengan memvariasikan ω dari −∞ ke ∞. Artinya, plot Nyquist digunakan untuk menggambar respons frekuensi lengkap dari fungsi transfer loop terbuka.
Kriteria Stabilitas Nyquist
Kriteria stabilitas Nyquist berfungsi pada principle of argument. Ini menyatakan bahwa jika ada kutub P dan nol Z diapit oleh jalur tertutup bidang 's', maka yang sesuai$G(s)H(s)$ pesawat harus mengelilingi asalnya $P − Z$waktu. Jadi, kita dapat menulis jumlah keliling N sebagai,
$$N=P-Z$$
Jika jalur tertutup bidang tertutup hanya berisi kutub, maka arah lingkar di $G(s)H(s)$ pesawat akan berlawanan dengan arah jalur tertutup tertutup di bidang 's'.
Jika jalur tertutup bidang tertutup hanya berisi nol, maka arah pengepungan di $G(s)H(s)$ pesawat akan searah dengan yang ada di jalur tertutup tertutup di bidang 's'.
Mari kita sekarang menerapkan prinsip argumen ke seluruh bagian kanan 's' dengan memilihnya sebagai jalur tertutup. Jalur yang dipilih ini disebutNyquist kontur.
Kita tahu bahwa sistem kontrol loop tertutup stabil jika semua kutub dari fungsi transfer loop tertutup berada di setengah kiri bidang 's'. Jadi, kutub dari fungsi transfer loop tertutup hanyalah akar dari persamaan karakteristik. Ketika urutan persamaan karakteristik meningkat, maka akan sulit untuk menemukan akarnya. Jadi, mari kita menghubungkan akar persamaan karakteristik ini sebagai berikut.
Kutub dari persamaan karakteristik sama dengan kutub dari fungsi transfer loop terbuka.
Nol dari persamaan karakteristik sama dengan yang ada pada kutub dari fungsi transfer loop tertutup.
Kita tahu bahwa sistem kontrol loop terbuka stabil jika tidak ada kutub loop terbuka di bagian kanan bidang 's'.
yaitu,$P=0 \Rightarrow N=-Z$
Kita tahu bahwa sistem kendali loop tertutup stabil jika tidak ada kutub loop tertutup di bagian kanan bidang 's'.
yaitu,$Z=0 \Rightarrow N=P$
Nyquist stability criterionmenyatakan jumlah keliling di sekitar titik kritis (1 + j0) harus sama dengan kutub persamaan karakteristik, yang tidak lain adalah kutub dari fungsi transfer loop terbuka di bagian kanan bidang 's'. Pergeseran titik awal ke (1 + j0) menghasilkan bidang persamaan karakteristik.
Aturan untuk Menggambar Plot Nyquist
Ikuti aturan berikut untuk merencanakan plot Nyquist.
Temukan kutub dan nol dari fungsi transfer loop terbuka $G(s)H(s)$ di pesawat.
Gambarkan plot kutub dengan memvariasikan $\omega$dari nol hingga tak terbatas. Jika kutub atau nol hadir pada s = 0, maka bervariasi$\omega$ dari 0+ hingga tak terbatas untuk menggambar plot kutub.
Gambarkan bayangan cermin plot kutub di atas untuk nilai $\omega$berkisar dari −∞ hingga nol (0 - jika ada kutub atau nol yang ada pada s = 0).
Jumlah setengah lingkaran berjari-jari tak hingga akan sama dengan jumlah kutub atau nol di tempat asal. Setengah lingkaran dengan radius tak terhingga akan dimulai dari titik di mana bayangan cermin dari plot kutub berakhir. Dan setengah lingkaran dengan radius tak terhingga ini akan berakhir di titik di mana plot kutub dimulai.
Setelah menggambar plot Nyquist, kita dapat menemukan kestabilan sistem kendali loop tertutup menggunakan kriteria stabilitas Nyquist. Jika titik kritis (-1 + j0) berada di luar pengepungan, maka sistem kendali loop tertutup benar-benar stabil.
Analisis Stabilitas menggunakan Nyquist Plots
Dari plot Nyquist, kita dapat mengidentifikasi apakah sistem kontrol stabil, stabil secara marginal atau tidak stabil berdasarkan nilai parameter tersebut.
- Dapatkan frekuensi silang dan frekuensi lintas fase
- Dapatkan margin dan margin fase
Frekuensi Penyeberangan Fase
Frekuensi di mana plot Nyquist memotong sumbu nyata negatif (sudut fase adalah 180 0 ) dikenal sebagaiphase cross over frequency. Ini dilambangkan dengan$\omega_{pc}$.
Dapatkan Frekuensi Silang
Frekuensi di mana plot Nyquist memiliki besaran satu dikenal sebagai gain cross over frequency. Ini dilambangkan dengan$\omega_{gc}$.
Kestabilan sistem kendali berdasarkan hubungan antara frekuensi lintas fase dan frekuensi gain lintas di bawah ini.
Jika fase melintasi frekuensi $\omega_{pc}$ lebih besar dari gain lintas frekuensi $\omega_{gc}$, maka sistem kontrolnya stable.
Jika fase melintasi frekuensi $\omega_{pc}$ sama dengan gain lintas frekuensi $\omega_{gc}$, maka sistem kontrolnya marginally stable.
Jika fase melintasi frekuensi $\omega_{pc}$ kurang dari gain lintas frekuensi $\omega_{gc}$, maka sistem kontrolnya unstable.
Dapatkan Margin
Margin keuntungan $GM$ sama dengan kebalikan dari besarnya plot Nyquist pada frekuensi lintas fase.
$$GM=\frac{1}{M_{pc}}$$
Dimana, $M_{pc}$ adalah besaran dalam skala normal pada frekuensi lintas fase.
Fase Margin
Margin fase $PM$sama dengan jumlah 180 0 dan sudut fase pada frekuensi lintas gain.
$$PM=180^0+\phi_{gc}$$
Dimana, $\phi_{gc}$ adalah sudut fasa pada frekuensi lintas gain.
Stabilitas sistem kontrol berdasarkan hubungan antara margin keuntungan dan margin fase tercantum di bawah ini.
Jika mendapatkan margin $GM$ lebih besar dari satu dan margin fase $PM$ positif, maka sistem kontrolnya stable.
Jika mendapatkan margin $GM$ sama dengan satu dan margin fase $PM$ nol derajat, maka sistem kontrolnya adalah marginally stable.
Jika mendapatkan margin $GM$ kurang dari satu dan / atau margin fase $PM$ negatif, maka sistem kontrolnya adalah unstable.
Ada tiga jenis kompensator - kompensator lag, lead dan lag-lead. Ini paling sering digunakan.
Kompensator Lag
Kompensator Lag adalah jaringan listrik yang menghasilkan keluaran sinusoidal yang memiliki kelambatan fasa ketika masukan sinusoidal diterapkan. Rangkaian kompensator lag di domain 's ditunjukkan pada gambar berikut.

Di sini, kapasitor dirangkai seri dengan resistor $R_2$ dan keluarannya diukur melalui kombinasi ini.
Fungsi transfer dari kompensator lag ini adalah -
$$\frac{V_o(s)}{V_i(s)}=\frac{1}{\alpha} \left( \frac{s+\frac{1}{\tau}}{s+\frac{1}{\alpha\tau}} \right )$$
Dimana,
$$\tau=R_2C$$
$$\alpha=\frac{R_1+R_2}{R_2}$$
Dari persamaan di atas, $\alpha$ selalu lebih besar dari satu.
Dari fungsi transfer, kita dapat menyimpulkan bahwa kompensator lag memiliki satu kutub pada $s = − \frac{1}{\alpha \tau}$ dan satu nol pada $s = −\frac{1}{\tau}$. Ini berarti, kutub akan lebih dekat ke asal dalam konfigurasi kutub-nol dari kompensator lag.
Pengganti, $s = j\omega$ dalam fungsi transfer.
$$\frac{V_o(j\omega)}{V_i(j\omega)}=\frac{1}{\alpha}\left( \frac{j\omega+\frac{1}{\tau}}{j\omega+\frac{1}{\alpha\tau}}\right )$$
Sudut fase $\phi = \tan^{−1} \omega\tau − tan^{−1} \alpha\omega\tau$
Kita tahu bahwa fasa sinyal sinusoidal keluaran sama dengan jumlah sudut fasa sinyal sinusoidal masukan dan fungsi transfernya.
Jadi, untuk menghasilkan kelambatan fasa pada keluaran kompensator ini, sudut fasa dari fungsi transfer harus negatif. Ini akan terjadi kapan$\alpha > 1$.
Kompensator Timbal
Kompensator timbal adalah jaringan listrik yang menghasilkan output sinusoidal yang memiliki timbal fase ketika input sinusoidal diterapkan. Rangkaian kompensator timbal di domain 's ditunjukkan pada gambar berikut.

Di sini kapasitor sejajar dengan resistor $R_1$ dan output diukur melintasi resistor $ R_2.
Fungsi transfer kompensator utama ini adalah -
$$ \ frac {V_o (s)} {V_i (s)} = \ beta \ left (\ frac {s \ tau + 1} {\ beta s \ tau + 1} \ right) $$
Dimana,
$$ \ tau = R_1C $$
$$ \ beta = \ frac {R_2} {R_1 + R_2} $$
Dari fungsi transfer, kita dapat menyimpulkan bahwa kompensator utama memiliki kutub pada $ s = - \ frac {1} {\ beta}$ and zero at $s = - \ frac {1} {\ beta \ tau} $.
Gantikan, $ s = j \ omega $ dalam fungsi transfer.
$$ \ frac {V_o (j \ omega)} {V_i (j \ omega)} = \ beta \ kiri (\ frac {j \ omega \ tau + 1} {\ beta j \ omega \ tau + 1} \ kanan ) $$
Sudut fase $ \ phi = tan ^ {- 1} \ omega \ tau - tan ^ {- 1} \ beta \ omega \ tau $
Kita tahu bahwa fasa sinyal sinusoidal keluaran sama dengan jumlah sudut fasa sinyal sinusoidal masukan dan fungsi transfernya.
Jadi, untuk menghasilkan timah fasa pada keluaran kompensator ini, sudut fasa dari fungsi transfer harus positif. Ini akan terjadi ketika $ 0 <\ beta <1 $. Oleh karena itu, nol akan lebih dekat ke asal dalam konfigurasi kutub-nol dari kompensator timbal.
Kompensator Lag-Lead
Kompensator Lag-Lead adalah jaringan listrik yang menghasilkan kelambatan fasa pada satu wilayah frekuensi dan kabel fase pada wilayah frekuensi lainnya. Ini adalah kombinasi dari lag dan kompensator utama. Sirkuit kompensator lag-lead di domain 's ditunjukkan pada gambar berikut.

Sirkuit ini terlihat seperti kedua kompensator bertingkat. Jadi, fungsi transfer dari rangkaian ini akan menjadi produk dari fungsi transfer dari lead dan kompensator lag.
$$ \ frac {V_o (s)} {V_i (s)} = \ beta \ left (\ frac {s \ tau_1 + 1} {\ beta s \ tau_1 + 1} \ right) \ frac {1} {\ alpha} \ kiri (\ frac {s + \ frac {1} {\ tau_2}} {s + \ frac {1} {\ alpha \ tau_2}} \ kanan) $$
Kami tahu $ \ alpha \ beta = 1 $.
$$ \ Rightarrow \ frac {V_o (s)} {V_i (s)} = \ left (\ frac {s + \ frac {1} {\ tau_1}} {s + \ frac {1} {\ beta \ tau_1}} \ kanan) \ kiri (\ frac {s + \ frac {1} {\ tau_2}} {s + \ frac {1} {\ alpha \ tau_2}} \ kanan) $$
Dimana,
$$ \ tau_1 = R_1C_1 $$
$$ \ tau_2 = R_2C_2 $$
Berbagai jenis pengontrol digunakan untuk meningkatkan kinerja sistem kontrol. Pada bab ini, kita akan membahas pengontrol dasar seperti pengontrol proporsional, turunan, dan integral.
Pengontrol Proporsional
Pengontrol proporsional menghasilkan keluaran, yang sebanding dengan sinyal kesalahan.
$$ u (t) \ propto e (t) $$
$$ \ Rightarrow u (t) = K_P e (t) $$
Terapkan transformasi Laplace di kedua sisi -
$$ U (s) = K_P E (s) $$
$$ \ frac {U (s)} {E (s)} = K_P $$
Oleh karena itu, fungsi transfer pengontrol proporsional adalah $ K_P $.
Dimana,
U (s) adalah transformasi Laplace dari sinyal penggerak u (t)
E (s) adalah transformasi Laplace dari sinyal kesalahan e (t)
K P adalah konstanta proporsionalitas
Diagram blok sistem kontrol loop tertutup umpan balik negatif kesatuan bersama dengan pengontrol proporsional ditunjukkan pada gambar berikut.

Pengontrol proporsional digunakan untuk mengubah respons transien sesuai kebutuhan.
Kontroler Derivatif
Pengontrol turunan menghasilkan keluaran, yang merupakan turunan dari sinyal kesalahan.
$$ u (t) = K_D \ frac {\ text {d} e (t)} {\ text {d} t} $$
Terapkan transformasi Laplace di kedua sisi.
$$ U (s) = K_D sE (s) $$
$$ \ frac {U (s)} {E (s)} = K_D s $$
Oleh karena itu, fungsi transfer dari pengontrol derivatif adalah $ K_D s $.
Di mana, $ K_D $ adalah konstanta turunan.
Diagram blok sistem kontrol loop tertutup umpan balik negatif kesatuan bersama dengan pengontrol turunannya ditunjukkan pada gambar berikut.

Pengontrol turunan digunakan untuk membuat sistem kendali yang tidak stabil menjadi sistem kendali yang stabil.
Pengontrol Integral
Pengontrol integral menghasilkan keluaran, yang merupakan bagian integral dari sinyal kesalahan.
$$ u (t) = K_I \ int e (t) dt $$
Terapkan transformasi Laplace di kedua sisi -
$$ U (s) = \ frac {K_I E (s)} {s} $$
$$ \ frac {U (s)} {E (s)} = \ frac {K_I} {s} $$
Oleh karena itu, fungsi transfer dari pengontrol integral adalah $ \ frac {K_I} {s} $.
Dimana, $ K_I $ adalah konstanta integral.
Diagram blok dari sistem kontrol loop tertutup umpan balik negatif kesatuan bersama dengan pengontrol integral ditunjukkan pada gambar berikut.

Kontroler integral digunakan untuk mengurangi kesalahan kondisi tunak.
Sekarang mari kita bahas tentang kombinasi pengontrol dasar.
Kontroler Proportional Derivative (PD)
Pengontrol turunan proporsional menghasilkan sebuah keluaran yang merupakan gabungan dari keluaran pengontrol proporsional dan turunan.
$$ u (t) = K_P e (t) + K_D \ frac {\ text {d} e (t)} {\ text {d} t} $$
Terapkan transformasi Laplace di kedua sisi -
$$ U (s) = (K_P + K_D s) E (s) $$
$$ \ frac {U (s)} {E (s)} = K_P + K_D s $$
Oleh karena itu, fungsi transfer dari pengontrol turunan proporsional adalah $ K_P + K_D s $.
Diagram blok sistem kontrol loop tertutup umpan balik negatif kesatuan bersama dengan pengontrol turunan proporsional ditunjukkan pada gambar berikut.

Pengontrol derivatif proporsional digunakan untuk meningkatkan stabilitas sistem kendali tanpa mempengaruhi kesalahan kondisi tunak.
Kontroler Proportional Integral (PI)
Pengontrol integral proporsional menghasilkan keluaran yang merupakan kombinasi dari keluaran pengontrol proporsional dan integral.
$$ u (t) = K_P e (t) + K_I \ int e (t) dt $$
Terapkan transformasi Laplace di kedua sisi -
$$ U (s) = \ kiri (K_P + \ frac {K_I} {s} \ kanan) E (s) $$
$$ \ frac {U (s)} {E (s)} = K_P + \ frac {K_I} {s} $$
Oleh karena itu, fungsi transfer pengontrol integral proporsional adalah $ K_P + \ frac {K_I} {s} $.
Diagram blok sistem kontrol loop tertutup umpan balik negatif kesatuan bersama dengan pengontrol integral proporsional ditunjukkan pada gambar berikut.

Pengontrol integral proporsional digunakan untuk mengurangi kesalahan kondisi tunak tanpa mempengaruhi stabilitas sistem kontrol.
Kontroler Proportional Integral Derivative (PID)
Pengontrol turunan integral proporsional menghasilkan sebuah keluaran yang merupakan gabungan dari keluaran pengontrol proporsional, integral dan turunan.
$$ u (t) = K_P e (t) + K_I \ int e (t) dt + K_D \ frac {\ text {d} e (t)} {\ text {d} t} $$
Terapkan transformasi Laplace di kedua sisi -
$$ U (s) = \ kiri (K_P + \ frac {K_I} {s} + K_D s \ kanan) E (s) $$
$$ \ frac {U (s)} {E (s)} = K_P + \ frac {K_I} {s} + K_D s $$
Oleh karena itu, fungsi transfer dari pengontrol turunan integral proporsional adalah $ K_P + \ frac {K_I} {s} + K_D s $.
Diagram blok sistem kontrol loop tertutup umpan balik negatif kesatuan bersama dengan pengontrol turunan integral proporsional ditunjukkan pada gambar berikut.

Pengontrol derivatif integral proporsional digunakan untuk meningkatkan stabilitas sistem kendali dan untuk mengurangi kesalahan kondisi tunak.
Itu state space model dari sistem Linear Time-Invariant (LTI) dapat direpresentasikan sebagai,
$$ \ dot {X} = AX + BU $$
$$ Y = CX + DU $$
Persamaan pertama dan kedua masing-masing dikenal sebagai persamaan keadaan dan persamaan keluaran.
Dimana,
X dan $ \ dot {X} $ masing-masing adalah vektor status dan vektor status diferensial.
U dan Y masing-masing adalah vektor masukan dan vektor keluaran.
A adalah matriks sistem.
B dan C adalah matriks masukan dan keluaran.
D adalah matriks umpan-maju.
Konsep Dasar Model Ruang Negara
Terminologi dasar berikut terlibat dalam bab ini.
Negara
Ini adalah sekelompok variabel, yang merangkum sejarah sistem untuk memprediksi nilai masa depan (keluaran).
Variabel Status
Jumlah variabel status yang diperlukan sama dengan jumlah elemen penyimpanan yang ada di sistem.
Examples - arus yang mengalir melalui induktor, tegangan melintasi kapasitor
Vektor Negara
Ini adalah vektor, yang berisi variabel status sebagai elemen.
Pada bab sebelumnya, kita telah membahas dua model matematis dari sistem kendali. Yaitu model persamaan diferensial dan model fungsi transfer. Model ruang keadaan dapat diperoleh dari salah satu dari dua model matematika ini. Sekarang mari kita bahas kedua metode ini satu per satu.
Model Ruang Negara dari Persamaan Diferensial
Simak rangkaian rangkaian RLC berikut ini. Ini memiliki tegangan input, $ v_i (t)$ and the current flowing through the circuit is $saya (t) $.

Ada dua elemen penyimpanan (induktor dan kapasitor) di sirkuit ini. Jadi, jumlah variabel status sama dengan dua dan variabel status ini adalah arus yang mengalir melalui induktor, $ i (t)$ and the voltage across capacitor, $v_c (t) $.
Dari rangkaian, tegangan keluaran, $ v_0 (t)$ is equal to the voltage across capacitor, $v_c (t) $.
$$ v_0 (t) = v_c (t) $$
Terapkan KVL di sekitar loop.
$$ v_i (t) = Ri (t) + L \ frac {\ text {d} i (t)} {\ text {d} t} + v_c (t) $$
$$ \ Rightarrow \ frac {\ text {d} i (t)} {\ text {d} t} = - \ frac {Ri (t)} {L} - \ frac {v_c (t)} {L} + \ frac {v_i (t)} {L} $$
Tegangan kapasitor adalah -
$$ v_c (t) = \ frac {1} {C} \ int i (t) dt $$
Diferensialkan persamaan di atas terhadap waktu.
$$ \ frac {\ text {d} v_c (t)} {\ text {d} t} = \ frac {i (t)} {C} $$
Vektor status, $ X = \ begin {bmatrix} i (t) \\ v_c (t) \ end {bmatrix} $
Vektor status diferensial, $ \ dot {X} = \ begin {bmatrix} \ frac {\ text {d} i (t)} {\ text {d} t} \\\ frac {\ text {d} v_c (t )} {\ text {d} t} \ end {bmatrix} $
Kita dapat menyusun persamaan diferensial dan persamaan keluaran ke dalam bentuk standar model ruang negara sebagai,
$$ \ dot {X} = \ begin {bmatrix} \ frac {\ text {d} i (t)} {\ text {d} t} \\\ frac {\ text {d} v_c (t)} { \ text {d} t} \ end {bmatrix} = \ begin {bmatrix} - \ frac {R} {L} & - \ frac {1} {L} \\\ frac {1} {C} & 0 \ akhiri {bmatrix} \ begin {bmatrix} i (t) \\ v_c (t) \ end {bmatrix} + \ begin {bmatrix} \ frac {1} {L} \\ 0 \ end {bmatrix} \ begin {bmatrix } v_i (t) \ end {bmatrix} $$
$$ Y = \ begin {bmatrix} 0 & 1 \ end {bmatrix} \ begin {bmatrix} i (t) \\ v_c (t) \ end {bmatrix} $$
Dimana,
$$ A = \ begin {bmatrix} - \ frac {R} {L} & - \ frac {1} {L} \\\ frac {1} {C} & 0 \ end {bmatrix}, \: B = \ begin {bmatrix} \ frac {1} {L} \\ 0 \ end {bmatrix}, \: C = \ begin {bmatrix} 0 & 1 \ end {bmatrix} \: dan \: D = \ begin {bmatrix } 0 \ end {bmatrix} $$
Model Ruang Negara dari Fungsi Transfer
Pertimbangkan dua jenis fungsi transfer berdasarkan jenis istilah yang ada di pembilang.
- Fungsi transfer yang memiliki suku konstan di Pembilang.
- Fungsi transfer yang memiliki fungsi polinomial 's' pada Numerator.
Fungsi transfer yang memiliki suku konstan di Pembilang
Pertimbangkan fungsi transfer berikut dari suatu sistem
$$ \ frac {Y (s)} {U (s)} = \ frac {b_0} {s ^ n + a_ {n-1} s ^ {n-1} + ... + a_1s + a_0} $ $
Susun kembali, persamaan di atas sebagai
$$ (s ^ n + a_ {n-1} s ^ {n-1} + ... + a_0) Y (s) = b_0 U (s) $$
Menerapkan transformasi Laplace terbalik di kedua sisi.
$$ \ frac {\ text {d} ^ ny (t)} {\ text {d} t ^ n} + a_ {n-1} \ frac {\ text {d} ^ {n-1} y (t )} {\ teks {d} t ^ {n-1}} + ... + a_1 \ frac {\ teks {d} y (t)} {\ teks {d} t} + a_0y (t) = b_0 u (t) $$
Membiarkan
$$ y (t) = x_1 $$
$$ \ frac {\ text {d} y (t)} {\ text {d} t} = x_2 = \ dot {x} _1 $$
$$ \ frac {\ text {d} ^ 2y (t)} {\ text {d} t ^ 2} = x_3 = \ dot {x} _2 $$
$$. $$
$$. $$
$$. $$
$$ \ frac {\ text {d} ^ {n-1} y (t)} {\ text {d} t ^ {n-1}} = x_n = \ dot {x} _ {n-1} $ $
$$ \ frac {\ text {d} ^ ny (t)} {\ text {d} t ^ n} = \ dot {x} _n $$
dan $ u (t) = u $
Kemudian,
$$ \ dot {x} _n + a_ {n-1} x_n + ... + a_1x_2 + a_0x_1 = b_0 u $$
Dari persamaan di atas, kita dapat menulis persamaan keadaan berikut ini.
$$ \ dot {x} _n = -a_0x_1-a_1x_2 -...- a_ {n-1} x_n + b_0 u $$
Persamaan keluarannya adalah -
$$ y (t) = y = x_1 $$
Model ruang negara adalah -
$ \ dot {X} = \ begin {bmatrix} \ dot {x} _1 \\\ dot {x} _2 \\\ vdots \\\ dot {x} _ {n-1} \\\ dot {x} _n \ end {bmatrix} $
$$ = \ begin {bmatrix} 0 & 1 & 0 & \ dotso & 0 & 0 \\ 0 & 0 & 1 & \ dotso & 0 & 0 \\\ vdots & \ vdots & \ vdots & \ dotso & \ vdots & \ vdots \\ 0 & 0 & 0 & \ dotso & 0 & 1 \\ - a_0 & -a_1 & -a_2 & \ dotso & -a_ {n-2} & -a_ {n-1} \ end {bmatrix } \ begin {bmatrix} x_1 \\ x_2 \\\ vdots \\ x_ {n-1} \\ x_n \ end {bmatrix} + \ begin {bmatrix} 0 \\ 0 \\\ vdots \\ 0 \\ b_0 \ end {bmatrix} \ begin {bmatrix} u \ end {bmatrix} $$
$$ Y = \ begin {bmatrix} 1 & 0 & \ dotso & 0 & 0 \ end {bmatrix} \ begin {bmatrix} x_1 \\ x_2 \\\ vdots \\ x_ {n-1} \\ x_n \ end {bmatrix} $$
Di sini, $ D = \ kiri [0 \ kanan]. $
Contoh
Temukan model ruang negara untuk sistem yang memiliki fungsi transfer.
$$ \ frac {Y (s)} {U (s)} = \ frac {1} {s ^ 2 + s + 1} $$
Susun kembali, persamaan di atas sebagai,
$$ (s ^ 2 + s + 1) Y (s) = U (s) $$
Terapkan transformasi Laplace terbalik di kedua sisi.
$$ \ frac {\ text {d} ^ 2y (t)} {\ text {d} t ^ 2} + \ frac {\ text {d} y (t)} {\ text {d} t} + y (t) = u (t) $$
Membiarkan
$$ y (t) = x_1 $$
$$ \ frac {\ text {d} y (t)} {\ text {d} t} = x_2 = \ dot {x} _1 $$
dan $ u (t) = u $
Maka, persamaan negara adalah
$$ \ dot {x} _2 = -x_1-x_2 + u $$
Persamaan keluarannya adalah
$$ y (t) = y = x_1 $$
Model ruang negara adalah
$$ \ dot {X} = \ begin {bmatrix} \ dot {x} _1 \\\ dot {x} _2 \ end {bmatrix} = \ begin {bmatrix} 0 & 1 \\ - 1 & -1 \ end {bmatrix} \ begin {bmatrix} x_1 \\ x_2 \ end {bmatrix} + \ begin {bmatrix} 0 \\ 1 \ end {bmatrix} \ kiri [u \ kanan] $$
$$ Y = \ begin {bmatrix} 1 & 0 \ end {bmatrix} \ begin {bmatrix} x_1 \\ x_2 \ end {bmatrix} $$
Fungsi transfer yang memiliki fungsi polinomial 's' pada Numerator
Pertimbangkan fungsi transfer berikut dari suatu sistem
$$ \ frac {Y (s)} {U (s)} = \ frac {b_n s ^ n + b_ {n-1} s ^ {n-1} + ... + b_1s + b_0} {s ^ n + a_ {n-1} d ^ {n-1} + ... + a_1 d + a_0} $$
$$ \ Rightarrow \ frac {Y (s)} {U (s)} = \ left (\ frac {1} {s ^ n + a_ {n-1} s ^ {n-1} + ... + a_1 s + a_0} \ kanan) (b_n s ^ n + b_ {n-1} s ^ {n-1} + ... + b_1s + b_0) $$
Persamaan di atas berupa hasil kali fungsi transfer dua blok yang bertingkat.
$$ \ frac {Y (s)} {U (s)} = \ left (\ frac {V (s)} {U (s)} \ right) \ left (\ frac {Y (s)} {V (s)} \ kanan) $$
Sini,
$$ \ frac {V (s)} {U (s)} = \ frac {1} {s ^ n + a_ {n-1} s ^ {n-1} + ... + a_1 s + a_0} $$
Susun kembali, persamaan di atas sebagai
$$ (s ^ n + a_ {n-1} s ^ {n-1} + ... + a_0) V (s) = U (s) $$
Terapkan transformasi Laplace terbalik di kedua sisi.
$$ \ frac {\ text {d} ^ nv (t)} {\ text {d} t ^ n} + a_ {n-1} \ frac {\ text {d} ^ {n-1} v (t )} {\ teks {d} t ^ {n-1}} + ... + a_1 \ frac {\ teks {d} v (t)} {\ teks {d} t} + a_0v (t) = u (t) $$
Membiarkan
$$ v (t) = x_1 $$
$$ \ frac {\ text {d} v ((t)} {\ text {d} t} = x_2 = \ dot {x} _1 $$
$$ \ frac {\ text {d} ^ 2v (t)} {\ text {d} t ^ 2} = x_3 = \ dot {x} _2 $$
$$. $$
$$. $$
$$. $$
$$ \ frac {\ text {d} ^ {n-1} v (t)} {\ text {d} t ^ {n-1}} = x_n = \ dot {x} _ {n-1} $ $
$$ \ frac {\ text {d} ^ nv (t)} {\ text {d} t ^ n} = \ dot {x} _n $$
dan $ u (t) = u $
Maka, persamaan negara adalah
$$ \ dot {x} _n = -a_0x_1-a_1x_2 -...- a_ {n-1} x_n + u $$
Mempertimbangkan,
$$ \ frac {Y (s)} {V (s)} = b_ns ^ n + b_ {n-1} s ^ {n-1} + ... + b_1s + b_0 $$
Susun kembali, persamaan di atas sebagai
$$ Y (s) = (b_ns ^ n + b_ {n-1} s ^ {n-1} + ... + b_1s + b_0) V (s) $$
Terapkan transformasi Laplace terbalik di kedua sisi.
$$ y (t) = b_n \ frac {\ text {d} ^ nv (t)} {\ text {d} t ^ n} + b_ {n-1} \ frac {\ text {d} ^ {n -1} v (t)} {\ teks {d} t ^ {n-1}} + ... + b_1 \ frac {\ teks {d} v (t)} {\ teks {d} t} + b_0v (t) $$
Dengan mensubstitusi variabel state dan $ y (t) = y $ pada persamaan di atas, akan didapatkan persamaan output sebagai,
$$ y = b_n \ titik {x} _n + b_ {n-1} x_n + ... + b_1x_2 + b_0x_1 $$
Gantikan, nilai $ \ dot {x} _n $ dalam persamaan di atas.
$$ y = b_n (-a_0x_1-a_1x_2 -...- a_ {n-1} x_n + u) + b_ {n-1} x_n + ... + b_1x_2 + b_0x_1 $$
$$ y = (b_0-b_na_0) x_1 + (b_1-b_na_1) x_2 + ... + (b_ {n-1} -b_na_ {n-1}) x_n + b_n u $$
Model ruang negara adalah
$ \ dot {X} = \ begin {bmatrix} \ dot {x} _1 \\\ dot {x} _2 \\\ vdots \\\ dot {x} _ {n-1} \\\ dot {x} _n \ end {bmatrix} $
$$ = \ begin {bmatrix} 0 & 1 & 0 & \ dotso & 0 & 0 \\ 0 & 0 & 1 & \ dotso & 0 & 0 \\\ vdots & \ vdots & \ vdots & \ dotso & \ vdots & \ vdots \\ 0 & 0 & 0 & \ dotso & 0 & 1 \\ - a_0 & -a_1 & -a_2 & \ dotso & -a_ {n-2} & -a_ {n-1} \ end {bmatrix } \ begin {bmatrix} x_1 \\ x_2 \\\ vdots \\ x_ {n-1} \\ x_n \ end {bmatrix} + \ begin {bmatrix} 0 \\ 0 \\\ vdots \\ 0 \\ b_0 \ end {bmatrix} \ begin {bmatrix} u \ end {bmatrix} $$
$$ Y = [b_0-b_na_0 \ quad b_1-b_na_1 \ quad ... \ quad b_ {n-2} -b_na_ {n-2} \ quad b_ {n-1} -b_na_ {n-1}] \ mulai {bmatrix} x_1 \\ x_2 \\\ vdots \\ x_ {n-1} \\ x_n \ end {bmatrix} $$
Jika $ b_n = 0 $,
$$ Y = [b_0 \ quad b_1 \ quad ... \ quad b_ {n-2} \ quad b_ {n-1}] \ begin {bmatrix} x_1 \\ x_2 \\\ vdots \\ x_ {n- 1} \\ x_n \ end {bmatrix} $$
Pada bab sebelumnya, kita telah mempelajari cara mendapatkan model ruang keadaan dari persamaan diferensial dan fungsi transfer. Pada bab ini, mari kita bahas bagaimana mendapatkan fungsi transfer dari model ruang keadaan.
Transfer Fungsi dari Model Ruang Negara
Kita tahu model ruang keadaan sistem Linear Time-Invariant (LTI) adalah -
$$ \ dot {X} = AX + BU $$
$$ Y = CX + DU $$
Terapkan Transformasi Laplace di kedua sisi persamaan keadaan.
$$ sX (s) = AX (s) + BU (s) $$
$$ \ Rightarrow (sI-A) X (s) = BU (s) $$
$$ \ Rightarrow X (s) = (sI-A) ^ {- 1} BU $$
Terapkan Transformasi Laplace di kedua sisi persamaan keluaran.
$$ Y (s) = CX (s) + DU (s) $$
Gantikan, nilai X (s) dalam persamaan di atas.
$$ \ Rightarrow Y (s) = C (sI-A) ^ {- 1} BU (s) + DU (s) $$
$$ \ Rightarrow Y (s) = [C (sI-A) ^ {- 1} B + D] U (s) $$
$$ \ Rightarrow \ frac {Y (s)} {U (s)} = C (sI-A) ^ {- 1} B + D $$
Persamaan di atas merupakan fungsi transfer dari sistem. Jadi, kita dapat menghitung fungsi transfer sistem dengan menggunakan rumus ini untuk sistem yang direpresentasikan dalam model ruang keadaan.
Note - Ketika $ D = [0] $, fungsi transfer akan menjadi
$$ \ frac {Y (s)} {U (s)} = C (sI-A) ^ {- 1} B $$
Example
Mari kita hitung fungsi transfer dari sistem yang direpresentasikan dalam model ruang negara sebagai,
$$ \ dot {X} = \ begin {bmatrix} \ dot {x} _1 \\\ dot {x} _2 \ end {bmatrix} = \ begin {bmatrix} -1 & -1 \\ 1 & 0 \ end {bmatrix} \ begin {bmatrix} x_1 \\ x_2 \ end {bmatrix} + \ begin {bmatrix} 1 \\ 0 \ end {bmatrix} [u] $$
$$ Y = \ begin {bmatrix} 0 & 1 \ end {bmatrix} \ begin {bmatrix} x_1 \\ x_2 \ end {bmatrix} $$
Sini,
$$ A = \ begin {bmatrix} -1 & -1 \\ 1 & 0 \ end {bmatrix}, \ quad B = \ begin {bmatrix} 1 \\ 0 \ end {bmatrix}, \ quad C = \ begin {bmatrix} 0 & 1 \ end {bmatrix} \ quad dan \ quad D = [0] $$
Rumus untuk fungsi transfer ketika $ D = [0] $ adalah -
$$ \ frac {Y (s)} {U (s)} = C (sI-A) ^ {- 1} B $$
Substitusi, A, B & C matriks dalam persamaan di atas.
$$ \ frac {Y (s)} {U (s)} = \ begin {bmatrix} 0 & 1 \ end {bmatrix} \ begin {bmatrix} s + 1 & 1 \\ - 1 & s \ end {bmatrix } ^ {- 1} \ begin {bmatrix} 1 \\ 0 \ end {bmatrix} $$
$$ \ Rightarrow \ frac {Y (s)} {U (s)} = \ begin {bmatrix} 0 & 1 \ end {bmatrix} \ frac {\ begin {bmatrix} s & -1 \\ 1 & s + 1 \ end {bmatrix}} {(s + 1) s-1 (-1)} \ begin {bmatrix} 1 \\ 0 \ end {bmatrix} $$
$$ \ Rightarrow \ frac {Y (s)} {U (s)} = \ frac {\ begin {bmatrix} 0 & 1 \ end {bmatrix} \ begin {bmatrix} s \\ 1 \ end {bmatrix}} {s ^ 2 + s + 1} = \ frac {1} {s ^ 2 + s + 1} $$
Oleh karena itu, fungsi transfer sistem untuk model ruang keadaan tertentu adalah
$$ \ frac {Y (s)} {U (s)} = \ frac {1} {s ^ 2 + s + 1} $$
State Transition Matrix dan Properties-nya
Jika sistem berada pada kondisi awal, maka akan dihasilkan suatu keluaran. Karena, keluaran ini ada bahkan tanpa adanya masukan, maka disebutzero input response$ x_ {ZIR} (t) $. Secara matematis, kita bisa menulisnya sebagai,
$$ x_ {ZIR} (t) = e ^ {At} X (0) = L ^ {- 1} \ kiri \ {\ kiri [sI-A \ kanan] ^ {- 1} X (0) \ kanan \} $$
Dari relasi di atas, kita dapat menulis matriks transisi state $ \ phi (t) $ as
$$ \ phi (t) = e ^ {At} = L ^ {- 1} [sI-A] ^ {- 1} $$
Jadi, respon input nol dapat diperoleh dengan mengalikan matriks transisi keadaan $ \ phi (t) $ dengan matriks kondisi awal.
Berikut adalah properti dari matriks transisi keadaan.
Jika $ t = 0 $, maka matriks transisi status akan sama dengan matriks Identitas.
$$ \ phi (0) = I $$
Kebalikan dari matriks transisi state akan sama dengan matriks transisi state hanya dengan mengganti 't' dengan '-t'.
$$ \ phi ^ {- 1} (t) = \ phi (−t) $$
Jika $ t = t_1 + t_2$ , then the corresponding state transition matrix is equal to the multiplication of the two state transition matrices at $t = t_1$ and $t = t_2 $.
$$ \ phi (t_1 + t_2) = \ phi (t_1) \ phi (t_2) $$
Pengendalian dan Pengamatan
Sekarang mari kita bahas kemampuan pengendalian dan pengamatan sistem kendali satu per satu.
Kontrol
Sistem kontrol dikatakan demikian controllable jika status awal sistem kontrol ditransfer (diubah) ke beberapa status lain yang diinginkan dengan input terkontrol dalam durasi waktu yang terbatas.
Kami dapat memeriksa pengendalian sistem kontrol dengan menggunakan Kalman’s test.
Tulis matriks $ Q_c $ dalam formulir berikut.
$$ Q_c = \ kiri [B \ quad AB \ quad A ^ 2B \ quad ... \ quad A ^ {n-1} B \ kanan] $$
Temukan determinan dari matriks $ Q_c $ dan jika tidak sama dengan nol, maka sistem kendali dapat dikontrol.
Observabilitas
Sistem kontrol dikatakan demikian observable jika mampu menentukan keadaan awal sistem kendali dengan mengamati keluaran dalam durasi waktu yang terbatas.
Kami dapat memeriksa observabilitas sistem kontrol dengan menggunakan Kalman’s test.
Tuliskan matriks $ Q_o $ dalam bentuk berikut.
$$ Q_o = \ kiri [C ^ T \ quad A ^ TC ^ T \ quad (A ^ T) ^ 2C ^ T \ quad ... \ quad (A ^ T) ^ {n-1} C ^ T \ kanan] $$
Tentukan determinan dari matriks $ Q_o $ dan jika tidak sama dengan nol, maka sistem kontrol dapat diobservasi.
Example
Mari kita verifikasi kemampuan kontrol dan observasi dari sistem kontrol yang direpresentasikan dalam model ruang negara sebagai,
$$ \ dot {x} = \ begin {bmatrix} \ dot {x} _1 \\\ dot {x} _2 \ end {bmatrix} = \ begin {bmatrix} -1 & -1 \\ 1 & 0 \ end {bmatrix} \ begin {bmatrix} x_1 \\ x_2 \ end {bmatrix} + \ begin {bmatrix} 1 \\ 0 \ end {bmatrix} [u] $$
$$ Y = \ begin {bmatrix} 0 & 1 \ end {bmatrix} \ begin {bmatrix} x_1 \\ x_2 \ end {bmatrix} $$
Sini,
$$ A = \ begin {bmatrix} -1 & -1 \\ 1 & 0 \ end {bmatrix}, \ quad B = \ begin {bmatrix} 1 \\ 0 \ end {bmatrix}, \ quad \ begin {bmatrix } 0 & 1 \ end {bmatrix}, D = [0] \ quad dan \ quad n = 2 $$
Untuk $ n = 2$, the matrix $Q_c $ akan
$$ Q_c = \ kiri [B \ quad AB \ kanan] $$
Kami akan mendapatkan produk dari matriks A dan B sebagai,
$$ AB = \ begin {bmatrix} -1 \\ 1 \ end {bmatrix} $$
$$ \ Rightarrow Q_c = \ begin {bmatrix} 1 & -1 \\ 0 & 1 \ end {bmatrix} $$
$$ | Q_c | = 1 \ neq 0 $$
Karena determinan dari matriks $ Q_c $ tidak sama dengan nol, sistem kontrol yang diberikan dapat dikontrol.
Untuk $ n = 2$, the matrix $Q_o $ akan -
$$ Q_o = \ kiri [C ^ T \ quad A ^ TC ^ T \ kanan] $$
Sini,
$$ A ^ T = \ begin {bmatrix} -1 & 1 \\ - 1 & 0 \ end {bmatrix} \ quad dan \ quad C ^ T = \ begin {bmatrix} 0 \\ 1 \ end {bmatrix} $ $
Kami akan mendapatkan produk dari matriks $ A ^ T$ and $C ^ T $ sebagai
$$ A ^ TC ^ T = \ begin {bmatrix} 1 \\ 0 \ end {bmatrix} $$
$$ \ Rightarrow Q_o = \ begin {bmatrix} 0 & 1 \\ 1 & 0 \ end {bmatrix} $$
$$ \ Rightarrow | Q_o | = -1 \ quad \ neq 0 $$
Karena determinan dari matriks $ Q_o $ tidak sama dengan nol, maka sistem kontrol yang diberikan dapat diamati.
Oleh karena itu, sistem kontrol yang diberikan dapat dikontrol dan diamati.