ทฤษฎีเครือข่าย - การตอบสนองของวงจรไฟฟ้ากระแสสลับ
ในบทที่แล้วเราได้กล่าวถึงการตอบสนองชั่วคราวและการตอบสนองต่อสภาวะคงที่ของวงจร DC ในบทนี้ให้เราพูดถึงไฟล์response of AC circuit. แนวคิดของการตอบสนองชั่วคราวและการตอบสนองต่อสภาวะคงที่ซึ่งเราได้กล่าวถึงในบทก่อนหน้านี้จะมีประโยชน์เช่นกัน
การค้นหาการตอบสนองของวงจร Series RL
พิจารณาสิ่งต่อไปนี้ series RL circuit แผนภาพ

ในวงจรข้างต้นไฟล์ switch ถูกเก็บไว้ openถึงt = 0และมันก็ปิดที่t = 0 ดังนั้นแหล่งจ่ายแรงดันไฟฟ้ากระแสสลับที่มีแรงดันไฟฟ้าสูงสุดV mโวลต์จึงไม่ได้เชื่อมต่อกับวงจรซีรีส์ RL จนถึงปัจจุบันนี้ ดังนั้นจึงมีno initial current ไหลผ่านตัวเหนี่ยวนำ
แผนภาพวงจรเมื่อ switch อยู่ใน closed ตำแหน่งดังแสดงในรูปต่อไปนี้
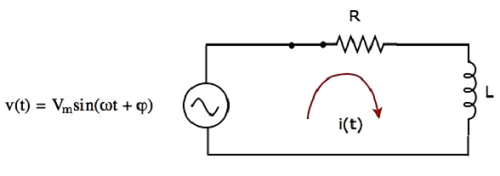
ตอนนี้กระแสi (t)ไหลในวงจรทั้งหมดเนื่องจากแหล่งจ่ายแรงดันไฟฟ้ากระแสสลับที่มีแรงดันไฟฟ้าสูงสุดV mโวลต์เชื่อมต่อกับวงจรซีรีส์ RL
เรารู้ว่ากระแสi (t) ที่ไหลผ่านวงจรข้างต้นจะมีสองพจน์คำหนึ่งที่แสดงถึงส่วนชั่วคราวและคำอื่น ๆ แสดงถึงสถานะคงที่
ในทางคณิตศาสตร์สามารถแสดงเป็น
$ i (t) = i_ {Tr} (t) + i_ {ss} (t) $Equation 1
ที่ไหน
$ i_ {Tr} (t) $ คือการตอบสนองชั่วคราวของกระแสที่ไหลผ่านวงจร
$ i_ {ss} (t) $ คือการตอบสนองสภาวะคงที่ของกระแสที่ไหลผ่านวงจร
ในบทที่แล้วเราได้รับการตอบสนองชั่วคราวของกระแสที่ไหลผ่านวงจรซีรีส์ RL อยู่ในรูปแบบของ $ Ke ^ {- \ lgroup \ frac {t} {\ tau} \ rgroup} $
แทน $ i_ {Tr} (t) = Ke ^ {- \ lgroup \ frac {t} {\ tau} \ rgroup} $ ในสมการ 1
$ i (t) = Ke ^ {- \ lgroup \ frac {t} {\ tau} \ rgroup} + i_ {ss} (t) $Equation 2
การคำนวณสถานะคงที่ในปัจจุบัน
หากสัญญาณไซน์ถูกนำไปใช้เป็นอินพุตให้กับวงจรไฟฟ้าเชิงเส้นมันจะสร้างเอาต์พุตที่คงที่ซึ่งก็คือ sinusoidal signal. ทั้งสัญญาณไซน์อินพุทและเอาท์พุทจะมีความถี่เท่ากัน แต่แอมพลิจูดและมุมเฟสต่างกัน
เราสามารถคำนวณการตอบสนองสภาวะคงที่ของวงจรไฟฟ้าเมื่อมันถูกกระตุ้นด้วยแหล่งจ่ายแรงดันไฟฟ้าแบบไซน์โดยใช้ Laplace Transform approach.
แผนภาพวงจร s-domain เมื่อ switch อยู่ใน closed ตำแหน่งดังแสดงในรูปต่อไปนี้
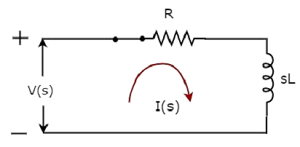
ในวงจรข้างต้นปริมาณและพารามิเตอร์ทั้งหมดจะแสดงเป็น s-domain. นี่คือการแปลง Laplace ของปริมาณและพารามิเตอร์โดเมนเวลา
Transfer function ของวงจรข้างต้นคือ
$$ H (s) = \ frac {I (s)} {V (s)} $$
$$ \ Rightarrow H (s) = \ frac {1} {Z (s)} $$
$$ \ Rightarrow H (s) = \ frac {1} {R + sL} $$
แทนที่ $ s = j \ omega $ ในสมการด้านบน
$$ H (j \ omega) = \ frac {1} {R + j \ omega L} $$
Magnitude of $ \ mathbf {\ mathit {H (j \ omega)}} $ คือ
$$ | H (j \ omega) | = \ frac {1} {\ sqrt {R ^ 2 + {\ omega} ^ 2} L ^ 2} $$
Phase angle of $ \ mathbf {\ mathit {H (j \ omega)}} $ คือ
$$ \ angle H (j \ omega) = -tan ^ {- 1} \ lgroup \ frac {\ omega L} {R} \ rgroup $$
เราจะได้รับไฟล์ steady state current $ i_ {ss} (t) $ โดยทำสองขั้นตอนต่อไปนี้ -
คูณแรงดันไฟฟ้าสูงสุดของแรงดันไฟฟ้าไซน์อินพุทและขนาดของ $ H (j \ omega) $
เพิ่มมุมเฟสของแรงดันไฟฟ้าไซน์อินพุทและ $ H (j \ omega) $
steady state current $ i_ {ss} (t) $ จะเป็น
$$ i_ {ss} (t) = \ frac {V_m} {\ sqrt {R ^ 2 + {\ omega} ^ 2 L ^ 2}} sin \ lgroup \ omega t + \ varphi - tan ^ {- 1} \ lgroup \ frac {\ omega L} {R} \ rgroup \ rgroup $$
แทนค่าของ $ i_ {ss} (t) $ ในสมการ 2
$ i (t) = Ke ^ {- \ lgroup \ frac {t} {\ tau} \ rgroup} + \ frac {V_m} {\ sqrt {R ^ 2 + {\ omega} ^ 2 L ^ 2}} บาป \ lgroup \ omega t + \ varphi - tan ^ {- 1} \ lgroup \ frac {\ omega L} {R} \ rgroup \ rgroup $Equation 3
เรารู้ว่าไม่มีกระแสไฟฟ้าเริ่มต้นในวงจร ดังนั้นแทนที่t = 0 & i (t) = 0ในสมการ 3 เพื่อหาค่าของค่าคงที่ K
$$ 0 = Ke ^ {- \ lgroup \ frac {0} {\ tau} \ rgroup} + \ frac {V_m} {\ sqrt {R ^ 2 + {\ omega} ^ 2 L ^ 2}} sin \ lgroup \ โอเมก้า (0) + \ varphi - tan ^ {- 1} \ lgroup \ frac {\ omega L} {R} \ rgroup \ rgroup $$
$$ \ Rightarrow 0 = K + \ frac {V_m} {\ sqrt {R ^ 2 + {\ omega} ^ 2 L ^ 2}} sin \ lgroup \ varphi - tan ^ {- 1} \ lgroup \ frac {\ โอเมก้า L} {R} \ rgroup \ rgroup $$
$$ \ Rightarrow K = - \ frac {V_m} {\ sqrt {R ^ 2 + {\ omega} ^ 2 L ^ 2}} sin \ lgroup \ varphi - tan ^ {- 1} \ lgroup \ frac {\ omega L} {R} \ rgroup \ rgroup $$
แทนค่าของKในสมการ 3
$ i (t) = - \ frac {V_m} {\ sqrt {R ^ 2 + {\ omega} ^ 2 L ^ 2}} sin \ lgroup \ varphi - tan ^ {- 1} \ lgroup \ frac {\ omega L} {R} \ rgroup \ rgroup e ^ {- \ lgroup \ frac {t} {\ tau} \ rgroup} + \ frac {V_m} {\ sqrt {R ^ 2 + {\ omega} ^ 2 L ^ 2 }} sin \ lgroup \ โอเมก้า t + \ varphi - tan ^ {- 1} \ lgroup \ frac {\ omega L} {R} \ rgroup \ rgroup $Equation 4
สมการที่ 4 แสดงถึงกระแสที่ไหลผ่านวงจรอนุกรม RL เมื่อมันถูกกระตุ้นด้วยแหล่งกำเนิดแรงดันไฟฟ้ารูปไซน์ มันมีสองเทอม คำศัพท์ที่หนึ่งและสองแสดงถึงการตอบสนองชั่วคราวและการตอบสนองต่อสภาวะคงที่ของกระแสตามลำดับ
เราทำได้ neglect the first termของสมการ 4 เนื่องจากค่าของมันจะน้อยกว่าหนึ่งมาก ดังนั้นกระแสผลลัพธ์ที่ไหลผ่านวงจรจะเป็น
$$ i (t) = \ frac {V_m} {\ sqrt {R ^ 2 + {\ omega} ^ 2 L ^ 2}} sin \ lgroup \ omega t + \ varphi - tan ^ {- 1} \ lgroup \ frac {\ omega L} {R} \ rgroup \ rgroup $$
มันมีเฉพาะไฟล์ steady state term. ดังนั้นเราจึงพบได้เฉพาะการตอบสนองต่อสภาวะคงที่ของวงจรไฟฟ้ากระแสสลับและละเลยการตอบสนองชั่วคราวของมัน