収束領域(ROC)
ラプラス変換が収束するσの範囲変化は、収束領域と呼ばれます。
ラプラス変換のROCの特性
ROCには、s平面のjω軸に平行なストリップラインが含まれています。

x(t)が絶対可積分であり、持続時間が有限である場合、ROCはs平面全体です。
x(t)は、次にROC右サイドシーケンスである場合:再{S}>σ O。
x(t)は、次にROC左側面配列である場合は、次のRe {S} <σ O。
x(t)が両面シーケンスの場合、ROCは2つの領域の組み合わせです。
ROCは、以下の例を使用して説明できます。
Example 1: Find the Laplace transform and ROC of $x(t) = e-^{at}u(t)$
$ LT [x(t)] = LT [e- ^ {at} u(t)] = {1 \ over S + a} $
$ Re {} \ gt -a $
$ ROC:Re {s} \ gt> -a $

Example 2: Find the Laplace transform and ROC of $x(t) = e^{at}u(-t)$
$ LT [x(t)] = LT [e ^ {at} u(t)] = {1 \ over Sa} $
$ Re {s} <a $
$ ROC:Re {s} <a $

Example 3: Find the Laplace transform and ROC of $x(t) = e^{-at}u(t)+e^{at}u(-t)$
$ LT [x(t)] = LT [e ^ {-at} u(t)+ e ^ {at} u(-t)] = {1 \ over S + a} + {1 \ over Sa} $
$ {1 \ over S + a} Re \ {s \} \ gt -a $の場合
$ {1 \ over Sa} Re \ {s \} \ lt a $

上の図を参照すると、組み合わせ領域は–aからaまでです。したがって、
$ ROC:-a <Re {s} <a $
因果関係と安定性
システムが因果関係を持つためには、その伝達関数のすべての極がs平面の右半分である必要があります。

システムは、その伝達関数のすべての極がs平面の左半分にあるときに安定していると言われます。

伝達関数の少なくとも1つの極がs平面の右半分にシフトすると、システムは不安定であると言われます。
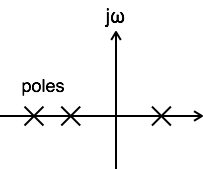
システムは、その伝達関数の少なくとも1つの極がs平面のjω軸上にある場合、わずかに安定していると言われます。

基本機能のROC
| f(t) | F(s) | ROC |
|---|---|---|
| $ u(t)$ | $$ {1 \ over s} $$ | ROC:Re {s}> 0 |
| $ t \、u(t)$ | $$ {1 \ over s ^ 2} $$ | ROC:Re {s}> 0 |
| $ t ^ n \、u(t)$ | $$ {n!\ over s ^ {n + 1}} $$ | ROC:Re {s}> 0 |
| $ e ^ {at} \、u(t)$ | $$ {1 \ over sa} $$ | ROC:Re {s}> a |
| $ e ^ {-at} \、u(t)$ | $$ {1 \ over s + a} $$ | ROC:Re {s}> -a |
| $ e ^ {at} \、u(t)$ | $$-{1 \ over sa} $$ | ROC:Re {s} <a |
| $ e ^ {-at} \、u(-t)$ | $$-{1 \ over s + a} $$ | ROC:Re {s} <-a |
| $ t \、e ^ {at} \、u(t)$ | $$ {1 \ over(sa)^ 2} $$ | ROC:Re {s}> a |
| $ t ^ {n} e ^ {at} \、u(t)$ | $$ {n!\ over(sa)^ {n + 1}} $$ | ROC:Re {s}> a |
| $ t \、e ^ {-at} \、u(t)$ | $$ {1 \ over(s + a)^ 2} $$ | ROC:Re {s}> -a |
| $ t ^ n \、e ^ {-at} \、u(t)$ | $$ {n!\ over(s + a)^ {n + 1}} $$ | ROC:Re {s}> -a |
| $ t \、e ^ {at} \、u(-t)$ | $$-{1 \ over(sa)^ 2} $$ | ROC:Re {s} <a |
| $ t ^ n \、e ^ {at} \、u(-t)$ | $$-{n!\ over(sa)^ {n + 1}} $$ | ROC:Re {s} <a |
| $ t \、e ^ {-at} \、u(-t)$ | $$-{1 \ over(s + a)^ 2} $$ | ROC:Re {s} <-a |
| $ t ^ n \、e ^ {-at} \、u(-t)$ | $$-{n!\ over(s + a)^ {n + 1}} $$ | ROC:Re {s} <-a |
| $ e ^ {-at} \ cos \、bt $ | $$ {s + a \ over(s + a)^ 2 + b ^ 2} $$ | |
| $ e ^ {-at} \ sin \、bt $ | $$ {b \ over(s + a)^ 2 + b ^ 2} $$ |