ระบบควบคุม - พีชคณิตแผนภาพบล็อก
พีชคณิตแผนภาพบล็อกเป็นเพียงพีชคณิตที่เกี่ยวข้องกับองค์ประกอบพื้นฐานของแผนภาพบล็อก พีชคณิตนี้เกี่ยวข้องกับการแสดงภาพของสมการพีชคณิต
การเชื่อมต่อพื้นฐานสำหรับบล็อก
มีการเชื่อมต่อพื้นฐานสามประเภทระหว่างสองบล็อก
การเชื่อมต่อแบบอนุกรม
เรียกอีกอย่างว่าการเชื่อมต่อแบบอนุกรม cascade connection. ในรูปต่อไปนี้สองบล็อกที่มีฟังก์ชันการถ่ายโอน $ G_1 (s) $ และ $ G_2 (s) $ เชื่อมต่อกันเป็นชุด

สำหรับชุดค่าผสมนี้เราจะได้ผลลัพธ์ $ Y (s) $ เป็น
$$ Y (s) = G_2 (s) Z (s) $$
โดยที่ $ Z (s) = G_1 (s) X (s) $
$$ \ Rightarrow Y (s) = G_2 (s) [G_1 (s) X (s)] = G_1 (s) G_2 (s) X (s) $$
$$ \ Rightarrow Y (s) = \ lbrace G_1 (s) G_2 (s) \ rbrace X (s) $$
เปรียบเทียบสมการนี้กับรูปแบบมาตรฐานของสมการผลลัพธ์ $ Y (s) = G (s) X (s) $ โดยที่ $ G (s) = G_1 (s) G_2 (s) $.
นั่นหมายความว่าเราสามารถเป็นตัวแทนของไฟล์ series connectionสองบล็อกด้วยบล็อกเดียว ฟังก์ชั่นการถ่ายโอนของบล็อกเดียวนี้คือไฟล์product of the transfer functionsของทั้งสองช่วงตึก แผนภาพบล็อกเทียบเท่าแสดงอยู่ด้านล่าง

ในทำนองเดียวกันคุณสามารถแสดงการเชื่อมต่อแบบอนุกรมของบล็อก 'n' ด้วยบล็อกเดียว ฟังก์ชันการถ่ายโอนของบล็อกเดียวนี้เป็นผลมาจากฟังก์ชันการถ่ายโอนของบล็อก 'n' ทั้งหมดเหล่านั้น
การเชื่อมต่อแบบขนาน
บล็อกที่เชื่อมต่ออยู่ parallel จะมีไฟล์ same input. ในรูปต่อไปนี้บล็อกสองบล็อกที่มีฟังก์ชันการถ่ายโอน $ G_1 (s) $ และ $ G_2 (s) $ เชื่อมต่อแบบขนาน เอาต์พุตของสองบล็อกนี้เชื่อมต่อกับจุดรวม

สำหรับชุดค่าผสมนี้เราจะได้ผลลัพธ์ $ Y (s) $ เป็น
$$ Y (s) = Y_1 (s) + Y_2 (s) $$
โดยที่ $ Y_1 (s) = G_1 (s) X (s) $ และ $ Y_2 (s) = G_2 (s) X (s) $
$$ \ Rightarrow Y (s) = G_1 (s) X (s) + G_2 (s) X (s) = \ lbrace G_1 (s) + G_2 (s) \ rbrace X (s) $$
เปรียบเทียบสมการนี้กับรูปแบบมาตรฐานของสมการผลลัพธ์ $ Y (s) = G (s) X (s) $
โดยที่ $ G (s) = G_1 (s) + G_2 (s) $
นั่นหมายความว่าเราสามารถเป็นตัวแทนของไฟล์ parallel connectionสองบล็อกด้วยบล็อกเดียว ฟังก์ชั่นการถ่ายโอนของบล็อกเดียวนี้คือไฟล์sum of the transfer functionsของทั้งสองช่วงตึก แผนภาพบล็อกเทียบเท่าแสดงอยู่ด้านล่าง

ในทำนองเดียวกันคุณสามารถแสดงการเชื่อมต่อแบบขนานของบล็อก 'n' ด้วยบล็อกเดียว ฟังก์ชันการถ่ายโอนของบล็อกเดียวนี้คือผลรวมพีชคณิตของฟังก์ชันการถ่ายโอนของบล็อก 'n' ทั้งหมดเหล่านั้น
การเชื่อมต่อข้อเสนอแนะ
ดังที่เราได้กล่าวไปแล้วในบทก่อนหน้านี้มีสองประเภท feedback- ข้อเสนอแนะเชิงบวกและข้อเสนอแนะเชิงลบ รูปต่อไปนี้แสดงระบบควบคุมข้อเสนอแนะเชิงลบ ที่นี่สองบล็อกที่มีฟังก์ชันการถ่ายโอน $ G (s) $ และ $ H (s) $ เป็นลูปปิด

ผลลัพธ์ของจุดรวมคือ -
$$ E (s) = X (s) -H (s) Y (s) $$
ผลลัพธ์ $ Y (s) $ คือ -
$$ Y (s) = E (s) G (s) $$
แทนค่า $ E (s) $ ในสมการด้านบน
$$ Y (s) = \ left \ {X (s) -H (s) Y (s) \ rbrace G (s) \ right \} $$
$$ Y (s) \ left \ {1 + G (s) H (s) \ rbrace = X (s) G (s) \ right \} $$
$$ \ Rightarrow \ frac {Y (s)} {X (s)} = \ frac {G (s)} {1 + G (s) H (s)} $$
ดังนั้นฟังก์ชันการถ่ายโอนลูปปิดของข้อเสนอแนะเชิงลบคือ $ \ frac {G (s)} {1 + G (s) H (s)} $
ซึ่งหมายความว่าเราสามารถแสดงการเชื่อมต่อข้อเสนอแนะเชิงลบของสองบล็อกด้วยบล็อกเดียว ฟังก์ชันการถ่ายโอนของบล็อกเดียวนี้คือฟังก์ชันการถ่ายโอนวงปิดของข้อเสนอแนะเชิงลบ แผนภาพบล็อกเทียบเท่าแสดงอยู่ด้านล่าง

ในทำนองเดียวกันคุณสามารถแสดงการเชื่อมต่อข้อเสนอแนะเชิงบวกของสองบล็อกด้วยบล็อกเดียว ฟังก์ชันการถ่ายโอนของบล็อกเดียวนี้คือฟังก์ชันการถ่ายโอนลูปปิดของการตอบรับเชิงบวกนั่นคือ $ \ frac {G (s)} {1-G (s) H (s)} $
บล็อกไดอะแกรมพีชคณิตสำหรับสรุปคะแนน
มีความเป็นไปได้สองประการในการเปลี่ยนจุดรวมเมื่อเทียบกับบล็อก -
- การเปลี่ยนจุดรวมหลังบล็อก
- เปลี่ยนจุดรวมก่อนบล็อก
ตอนนี้ให้เราดูว่าต้องเตรียมการแบบใดในสองกรณีข้างต้นทีละรายการ
การเปลี่ยนจุดสรุปหลังจากบล็อก
พิจารณาแผนภาพบล็อกที่แสดงในรูปต่อไปนี้ ที่นี่จุดรวมอยู่ก่อนบล็อก

จุดรวมมีสองอินพุต $ R (s) $ และ $ X (s) $ ผลลัพธ์ของมันคือ $ \ left \ {R (s) + X (s) \ right \} $
ดังนั้นอินพุตของบล็อก $ G (s) $ คือ $ \ left \ {R (s) + X (s) \ right \} $ และผลลัพธ์ของมันคือ -
$$ Y (s) = G (s) \ left \ {R (s) + X (s) \ right \} $$
$ \ Rightarrow Y (s) = G (s) R (s) + G (s) X (s) $ (Equation 1)
ตอนนี้เปลี่ยนจุดรวมหลังบล็อก แผนภาพบล็อกนี้แสดงในรูปต่อไปนี้

ผลลัพธ์ของบล็อก $ G (s) $ คือ $ G (s) R (s) $
ผลลัพธ์ของจุดรวมคือ
$ Y (s) = G (s) R (s) + X (s) $ (Equation 2)
เปรียบเทียบสมการ 1 และสมการ 2
เทอมแรก $ 'G (s) R (s)' $ เหมือนกันทั้งในสมการ แต่มีความแตกต่างในเทอมที่สอง เพื่อให้ได้คำที่สองเหมือนกันเราต้องการอีกหนึ่งบล็อก $ G (s) $ มีอินพุต $ X (s) $ และเอาต์พุตของบล็อกนี้ถูกกำหนดให้เป็นอินพุตไปยังจุดรวมแทนที่จะเป็น $ X (s) $ แผนภาพบล็อกนี้แสดงในรูปต่อไปนี้
การเปลี่ยนจุดสรุปก่อนบล็อก
พิจารณาแผนภาพบล็อกที่แสดงในรูปต่อไปนี้ ที่นี่จุดรวมอยู่หลังบล็อก
ผลลัพธ์ของแผนภาพบล็อกนี้คือ -
$ Y (s) = G (s) R (s) + X (s) $ (Equation 3)
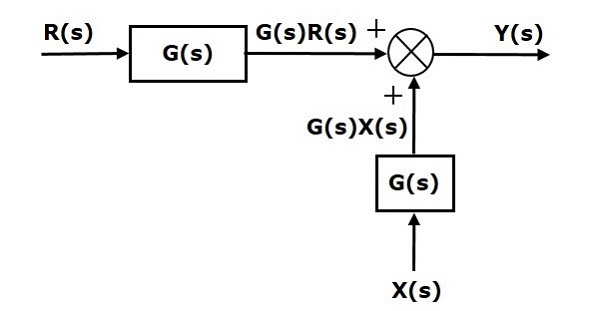
ตอนนี้เปลี่ยนจุดรวมก่อนบล็อก แผนภาพบล็อกนี้แสดงในรูปต่อไปนี้
ผลลัพธ์ของแผนภาพบล็อกนี้คือ -
$ Y (S) = G (s) R (s) + G (s) X (s) $ (Equation 4)
เปรียบเทียบสมการ 3 และสมการ 4
เทอมแรก $ 'G (s) R (s)' $ เหมือนกันในทั้งสองสมการ แต่มีความแตกต่างในเทอมที่สอง เพื่อให้ได้คำที่สองเหมือนกันเราต้องการอีกหนึ่งบล็อก $ \ frac {1} {G (s)} $ มีอินพุต $ X (s) $ และเอาต์พุตของบล็อกนี้ถูกกำหนดให้เป็นอินพุตไปยังจุดรวมแทนที่จะเป็น $ X (s) $ แผนภาพบล็อกนี้แสดงในรูปต่อไปนี้

บล็อกไดอะแกรมพีชคณิตสำหรับจุด Take-off
มีความเป็นไปได้สองประการในการเปลี่ยนจุดเริ่มต้นเมื่อเทียบกับบล็อก -
- เปลี่ยนจุดขึ้น - ลงหลังบล็อก
- เปลี่ยนจุดขึ้น - ลงก่อนบล็อก
ตอนนี้ให้เราดูว่าจะต้องดำเนินการอย่างไรในสองกรณีข้างต้นทีละข้อ
เปลี่ยนจุดขึ้น - ลงหลังจากบล็อก
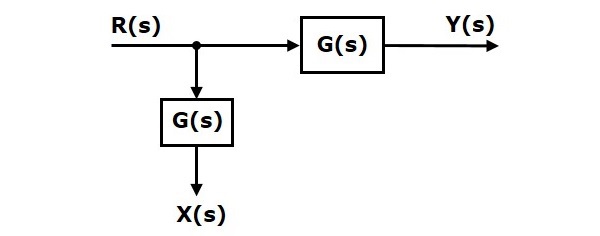
พิจารณาแผนภาพบล็อกที่แสดงในรูปต่อไปนี้ ในกรณีนี้จุดบินขึ้นจะอยู่ก่อนบล็อก

ที่นี่ $ X (s) = R (s) $ และ $ Y (s) = G (s) R (s) $
เมื่อคุณเปลี่ยนจุดบินขึ้นหลังบล็อกเอาต์พุต $ Y (s) $ จะเท่ากัน แต่มีค่า $ X (s) $ แตกต่างกัน ดังนั้นเพื่อให้ได้ $ X (s) $ เท่ากันเราต้องการอีกหนึ่งบล็อก $ \ frac {1} {G (s)} $ มีอินพุต $ Y (s) $ และเอาต์พุตคือ $ X (s) $ แผนภาพบล็อกนี้แสดงในรูปต่อไปนี้

เปลี่ยนจุดขึ้น - ลงก่อนบล็อก
พิจารณาแผนภาพบล็อกที่แสดงในรูปต่อไปนี้ จุดขึ้นเครื่องบินจะอยู่หลังบล็อก

ที่นี่ $ X (s) = Y (s) = G (s) R (s) $
เมื่อคุณเปลี่ยนจุดบินขึ้นก่อนบล็อกผลลัพธ์ $ Y (s) $ จะเท่ากัน แต่มีค่า $ X (s) $ แตกต่างกัน ดังนั้นเพื่อให้ได้ค่า $ X (s) $ เท่ากันเราต้องการ $ G (s) $ อีกหนึ่งบล็อก มีอินพุต $ R (s) $ และเอาต์พุตคือ $ X (s) $ แผนภาพบล็อกนี้แสดงในรูปต่อไปนี้