Моделирование механических систем
В этой главе давайте обсудим differential equation modelingмеханических систем. Есть два типа механических систем в зависимости от типа движения.
- Трансляционные механические системы
- Вращательные механические системы
Моделирование трансляционных механических систем
Трансляционные механические системы движутся по straight line. Эти системы в основном состоят из трех основных элементов. Это масса, пружина и демпфер.
Если к поступательной механической системе приложена сила, то ей противостоят противоположные силы, обусловленные массой, упругостью и трением системы. Поскольку приложенная сила и противодействующие силы направлены в противоположные стороны, алгебраическая сумма сил, действующих на систему, равна нулю. Давайте теперь посмотрим на силу, которой противостоят эти три элемента по отдельности.
Масса
Масса - это свойство тела, которое хранит kinetic energy. Если сила приложена к телу, имеющему массуM, то ему противостоит противодействующая сила из-за массы. Эта противодействующая сила пропорциональна ускорению тела. Предположим, что эластичность и трение незначительны.

$$ F_m \ propto \: a $$
$$ \ Rightarrow F_m = Ma = M \ frac {\ text {d} ^ 2x} {\ text {d} t ^ 2} $$
$$ F = F_m = M \ frac {\ text {d} ^ 2x} {\ text {d} t ^ 2} $$
Куда,
F приложенная сила
Fm противодействующая сила за счет массы
M масса
a это ускорение
x это смещение
весна
Весна - это элемент, который хранит potential energy. Если к пружине приложено усилиеK, то ему противодействует противодействующая сила из-за упругости пружины. Эта противодействующая сила пропорциональна перемещению пружины. Предположим, что масса и трение незначительны.

$$ F \ propto \: x $$
$$ \ Rightarrow F_k = Kx $$
$$ F = F_k = Kx $$
Куда,
F приложенная сила
Fk противодействующая сила за счет упругости пружины
K жесткость пружины
x это смещение
Dashpot
Если на приборную панель действует сила B, то ему противостоит противодействующая сила из-за frictionдашпота. Эта противодействующая сила пропорциональна скорости тела. Предположим, что масса и эластичность незначительны.

$$ F_b \ propto \: \ nu $$
$$ \ Rightarrow F_b = B \ nu = B \ frac {\ text {d} x} {\ text {d} t} $$
$$ F = F_b = B \ frac {\ text {d} x} {\ text {d} t} $$
Куда,
Fb противодействующая сила из-за трения демпфера
B коэффициент трения
v это скорость
x это смещение
Моделирование вращательных механических систем
Вращательные механические системы движутся вокруг фиксированной оси. Эти системы в основном состоят из трех основных элементов. Этоmoment of inertia, torsional spring а также dashpot.
Если к вращающейся механической системе приложен крутящий момент, то ему противодействуют противоположные крутящие моменты из-за момента инерции, упругости и трения системы. Поскольку приложенный крутящий момент и противоположные крутящие моменты имеют противоположные направления, алгебраическая сумма крутящих моментов, действующих на систему, равна нулю. Давайте теперь посмотрим на крутящий момент, которому противостоят эти три элемента по отдельности.
Момент инерции
В поступательной механической системе масса запасает кинетическую энергию. Точно так же во вращающейся механической системе момент инерции сохраняетсяkinetic energy.
Если крутящий момент приложен к телу, имеющему момент инерции J, то ему противодействует противодействующий крутящий момент из-за момента инерции. Этот противодействующий крутящий момент пропорционален угловому ускорению тела. Предположим, что эластичность и трение незначительны.

$$ T_j \ propto \: \ alpha $$
$$ \ Rightarrow T_j = J \ alpha = J \ frac {\ text {d} ^ 2 \ theta} {\ text {d} t ^ 2} $$
$$ T = T_j = J \ frac {\ text {d} ^ 2 \ theta} {\ text {d} t ^ 2} $$
Куда,
T прилагаемый крутящий момент
Tj - противодействующий крутящий момент из-за момента инерции
J момент инерции
α угловое ускорение
θ угловое смещение
Торсионная пружина
В поступательной механической системе пружина хранит потенциальную энергию. Точно так же в ротационной механической системе склады торсионных пружинpotential energy.
Если к торсионной пружине приложен крутящий момент K, то ему противодействует противодействующий крутящий момент из-за упругости торсионной пружины. Этот противодействующий крутящий момент пропорционален угловому смещению торсионной пружины. Предположим, что момент инерции и трение незначительны.
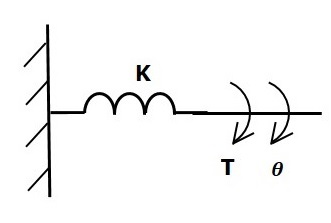
$$ T_k \ propto \: \ theta $$
$$ \ Rightarrow T_k = K \ theta $$
$$ T = T_k = K \ theta $$
Куда,
T прилагаемый крутящий момент
Tk противодействующий крутящий момент за счет упругости торсионной пружины
K жесткость пружины кручения
θ угловое смещение
Dashpot
Если крутящий момент приложен к приборной панели B, то ему противостоит противодействующий крутящий момент из-за rotational frictionдашпота. Этот противоположный крутящий момент пропорционален угловой скорости тела. Предположим, что момент инерции и упругость незначительны.
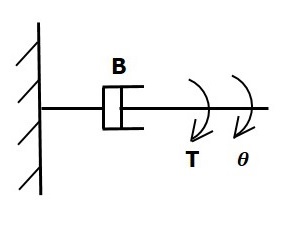
$$ T_b \ propto \: \ omega $$
$$ \ Rightarrow T_b = B \ omega = B \ frac {\ text {d} \ theta} {\ text {d} t} $$
$$ T = T_b = B \ frac {\ text {d} \ theta} {\ text {d} t} $$
Куда,
Tb - противодействующий крутящий момент из-за трения вращения приборной панели
B коэффициент трения вращения
ω угловая скорость
θ угловое смещение