Analogie elektryczne układów mechanicznych
Mówi się, że istnieją dwa systemy analogous do siebie nawzajem, jeśli spełnione są następujące dwa warunki.
- Te dwa systemy są fizycznie różne
- Modelowanie równań różniczkowych tych dwóch układów jest takie samo
Systemy elektryczne i systemy mechaniczne to dwa fizycznie różne systemy. Istnieją dwa typy analogii elektrycznych do translacyjnych układów mechanicznych. Są to analogia siły z napięciem i analogia z prądem siły.
Wymuś analogię napięcia
Obowiązuje analogia napięciowa, matematyczne równania translational mechanical system porównuje się z równaniami siatki układu elektrycznego.
Rozważ następujący translacyjny układ mechaniczny, jak pokazano na poniższym rysunku.
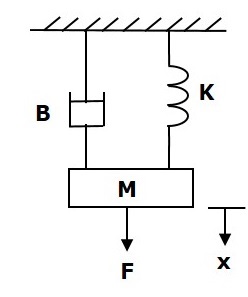
Plik force balanced equation dla tego systemu jest
$$ F = F_m + F_b + F_k $$
$ \ Rightarrow F = M \ frac {\ text {d} ^ 2x} {\ text {d} t ^ 2} + B \ frac {\ text {d} x} {\ text {d} t} + Kx $ (Equation 1)
Rozważ następujący układ elektryczny, jak pokazano na poniższym rysunku. Ten obwód składa się z rezystora, cewki i kondensatora. Wszystkie te elementy elektryczne są połączone szeregowo. Napięcie wejściowe przyłożone do tego obwodu wynosi $ V $ woltów, a prąd przepływający przez obwód wynosi $ i $ amperów.

Równanie siatki dla tego obwodu to
$ V = Ri + L \ frac {\ text {d} i} {\ text {d} t} + \ frac {1} {c} \ int idt $ (Equation 2)
Zastąp, $ i = \ frac {\ text {d} q} {\ text {d} t} $ w równaniu 2.
$$ V = R \ frac {\ text {d} q} {\ text {d} t} + L \ frac {\ text {d} ^ 2q} {\ text {d} t ^ 2} + \ frac { q} {C} $$
$ \ Rightarrow V = L \ frac {\ text {d} ^ 2q} {\ text {d} t ^ 2} + R \ frac {\ text {d} q} {\ text {d} t} + \ left (\ frac {1} {c} \ right) q $ (Equation 3)
Porównując Równanie 1 i Równanie 3, otrzymamy analogiczne wielkości translacyjnego układu mechanicznego i układu elektrycznego. Poniższa tabela przedstawia te analogiczne wielkości.
| Translacyjny system mechaniczny | Układ elektryczny |
|---|---|
| Siła (F) | Napięcie (V) |
| Masa (M) | Indukcyjność (L) |
| Współczynnik tarcia (B) | Odporność (R) |
| Stała sprężyny (K) | Odwrotność pojemności $ (\ frac {1} {c}) $ |
| Przemieszczenie (x) | Opłata (q) |
| Prędkość (v) | Bieżący (i) |
Podobnie, istnieje analogia napięcia momentu obrotowego dla obrotowych układów mechanicznych. Omówmy teraz tę analogię.
Analogia napięcia momentu obrotowego
W tej analogii matematyczne równania rotational mechanical system porównuje się z równaniami siatki układu elektrycznego.
Na poniższym rysunku przedstawiono obrotowy układ mechaniczny.

Równanie zbilansowanego momentu obrotowego to
$$ T = T_j + T_b + T_k $$
$ \ Rightarrow T = J \ frac {\ text {d} ^ 2 \ theta} {\ text {d} t ^ 2} + B \ frac {\ text {d} \ theta} {\ text {d} t} + k \ theta $ (Equation 4)
Porównując równanie 4 i równanie 3, otrzymamy analogiczne wielkości obrotowego układu mechanicznego i układu elektrycznego. Poniższa tabela przedstawia te analogiczne wielkości.
| Rotacyjny system mechaniczny | Układ elektryczny |
|---|---|
| Moment obrotowy (T) | Napięcie (V) |
| Moment bezwładności (J) | Indukcyjność (L) |
| Współczynnik tarcia obrotowego (B) | Odporność (R) |
| Stała sprężyny skrętnej (K) | Odwrotność pojemności $ (\ frac {1} {c}) $ |
| Przemieszczenie kątowe (θ) | Opłata (q) |
| Prędkość kątowa (ω) | Bieżący (i) |
Wymuś analogię prądu
W obecnej analogii obowiązują równania matematyczne translational mechanical system porównuje się z równaniami węzłowymi układu elektrycznego.
Rozważ następujący układ elektryczny, jak pokazano na poniższym rysunku. Obwód ten składa się ze źródła prądu, rezystora, cewki i kondensatora. Wszystkie te elementy elektryczne są połączone równolegle.

Równanie węzłowe to
$ i = \ frac {V} {R} + \ frac {1} {L} \ int Vdt + C \ frac {\ text {d} V} {\ text {d} t} $ (Equation 5)
Zastąp, $ V = \ frac {\ text {d} \ Psi} {\ text {d} t} $ w równaniu 5.
$$ i = \ frac {1} {R} \ frac {\ text {d} \ Psi} {\ text {d} t} + \ left (\ frac {1} {L} \ right) \ Psi + C \ frac {\ text {d} ^ 2 \ Psi} {\ text {d} t ^ 2} $$
$ \ Rightarrow i = C \ frac {\ text {d} ^ 2 \ Psi} {\ text {d} t ^ 2} + \ left (\ frac {1} {R} \ right) \ frac {\ text { d} \ Psi} {\ text {d} t} + \ left (\ frac {1} {L} \ right) \ Psi $ (Equation 6)
Porównując Równanie 1 i Równanie 6, otrzymamy analogiczne wielkości translacyjnego układu mechanicznego i układu elektrycznego. Poniższa tabela przedstawia te analogiczne wielkości.
| Translacyjny system mechaniczny | Układ elektryczny |
|---|---|
| Siła (F) | Bieżący (i) |
| Masa (M) | Pojemność (C) |
| Współczynnik tarcia (B) | Odwrotność oporu $ (\ frac {1} {R}) $ |
| Stała sprężyny (K) | Odwrotność indukcyjności $ (\ frac {1} {L}) $ |
| Przemieszczenie (x) | Strumień magnetyczny (ψ) |
| Prędkość (v) | Napięcie (V) |
Podobnie, istnieje analogia prądu momentu obrotowego dla obrotowych układów mechanicznych. Omówmy teraz tę analogię.
Analogia prądu momentu obrotowego
W tej analogii równania matematyczne funkcji rotational mechanical system porównuje się z równaniami siatki węzłowej układu elektrycznego.
Porównując równanie 4 i równanie 6, otrzymamy analogiczne wielkości obrotowego układu mechanicznego i układu elektrycznego. Poniższa tabela przedstawia te analogiczne wielkości.
| Rotacyjny system mechaniczny | Układ elektryczny |
|---|---|
| Moment obrotowy (T) | Bieżący (i) |
| Moment bezwładności (J) | Pojemność (C) |
| Współczynnik tarcia obrotowego (B) | Odwrotność oporu $ (\ frac {1} {R}) $ |
| Stała sprężyny skrętnej (K) | Odwrotność indukcyjności $ (\ frac {1} {L}) $ |
| Przemieszczenie kątowe (θ) | Strumień magnetyczny (ψ) |
| Prędkość kątowa (ω) | Napięcie (V) |
W tym rozdziale omówiliśmy analogie elektryczne układów mechanicznych. Te analogie są pomocne w badaniu i analizie systemu nieelektrycznego, takiego jak układ mechaniczny z analogicznego układu elektrycznego.