DSP-신호 컨볼 루션에 대한 작업
시간 영역에서 두 신호의 컨볼 루션은 주파수 영역에서 표현의 곱셈과 같습니다. 수학적으로 두 신호의 회선을 다음과 같이 쓸 수 있습니다.
$$ y (t) = x_ {1} (t) * x_ {2} (t) $$ $$ = \ int _ {-\ infty} ^ {\ infty} x_ {1} (p) .x_ {2 } (tp) dp $$컨볼 루션 단계
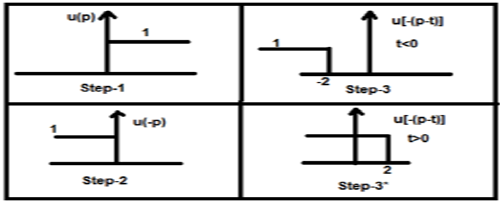
- 신호 x 1 (t)를 가져 와서 t = p를 거기에 넣어 x 1 (p) 가되도록합니다 .
- 신호 x 2 (t)를 취하고 1 단계를 수행하여 x 2 (p)로 만듭니다.
- 신호를 접습니다. 즉 x 2 (-p)입니다.
- 위 신호 x 2 의 시간 이동을 수행합니다. [-(pt)]
- 그런 다음 두 신호를 모두 곱하십시오. 예 : $ x_ {1} (p) .x_ {2} [− (p−t)] $
예
고유 한 종류의 단계 신호 u (t)의 컨볼 루션을 수행해 보겠습니다.
$ y (t) = u (t) * u (t) $
$ = \ int _ {-\ infty} ^ {\ infty} [u (p) .u [-(pt)] dp $
이제이 t는 아래 그림과 같이 0보다 크거나 작을 수 있습니다.
따라서 위의 경우 다음과 같은 결과가 발생합니다.
$ y (t) = \ begin {cases} 0, if \ quad t <0 \\\ int_ {0} ^ {t} 1dt, & for \ quad t> 0 \ end {cases} $
$ = \ begin {cases} 0, & if \ quad t <0 \\ t, & t> 0 \ end {cases} = r (t) $
컨볼 루션의 속성
교환
컨볼 루션의 순서는 중요하지 않으며 수학적으로 다음과 같이 표시 될 수 있습니다.
$$ x_ {1} (t) * x_ {2} (t) = x_ {2} (t) * x_ {1} (t) $$연관
3 개의 신호를 포함하는 컨볼 루션의 순서는 무엇이든 될 수 있습니다. 수학적으로는 다음과 같이 표시 될 수 있습니다.
$$ x_ {1} (t) * [x_ {2} (t) * x_ {3} (t)] = [x_ {1} (t) * x_ {2} (t)] * x_ {3} (t) $$분배
두 신호를 먼저 추가 한 다음 세 번째 신호에 컨볼 루션을 만들 수 있습니다. 이것은 두 신호를 세 번째 신호와 개별적으로 합성하고 마지막으로 추가하는 것과 같습니다. 수학적으로 이것은 다음과 같이 쓸 수 있습니다.
$$ x_ {1} (t) * [x_ {2} (t) + x_ {3} (t)] = [x_ {1} (t) * x_ {2} (t) + x_ {1} ( t) * x_ {3} (t)] $$지역
신호가 두 신호의 컨볼 루션의 결과 인 경우 신호의 면적은 개별 신호의 곱셈입니다. 수학적으로 이것은 쓸 수 있습니다
만약 $ Y (t) = X_ {1} * X_ {2} (t) $
그러면 y (t)의 면적 = x 1의 면적 (t) X x 2의 면적 (t)
스케일링
두 신호가 알려지지 않은 상수 "a"로 스케일링되고 컨볼 루션이 수행되면 결과 신호도 동일한 상수 "a"로 컨볼 루트되고 아래 표시된대로 해당 수량으로 나뉩니다.
만약, $ x_ {1} (t) * x_ {2} (t) = y (t) $
그런 다음 $ x_ {1} (at) * x_ {2} (at) = \ frac {y (at)} {a}, a \ ne 0 $
지연
신호 y (t)가 두 신호 x1 (t)와 x2 (t)의 컨볼 루션 결과라고 가정합니다. 두 신호가 각각 시간 t1 및 t2만큼 지연되면 결과 신호 y (t)는 (t1 + t2)만큼 지연됩니다. 수학적으로 다음과 같이 쓸 수 있습니다.
만약, $ x_ {1} (t) * x_ {2} (t) = y (t) $
그러면 $ x_ {1} (t-t_ {1}) * x_ {2} (t-t_ {2}) = y [t- (t_ {1} + t_ {2})] $
해결 된 예
Example 1 − 신호 u (t-1) 및 u (t-2)의 컨볼 루션을 구합니다.
Solution− 주어진 신호는 u (t-1) 및 u (t-2)입니다. 컨볼 루션은 아래와 같이 수행 할 수 있습니다.
$ y (t) = u (t-1) * u (t-2) $
$ y (t) = \ int _ {-\ infty} ^ {+ \ infty} [u (t-1) .u (t-2)] dt $
$ = r (t-1) + r (t-2) $
$ = r (t-3) $
Example 2 − 다음과 같이 주어진 두 신호의 회선을 구합니다
$x_{1}(n) = \lbrace 3,-2, 2\rbrace $
$ x_ {2} (n) = \ begin {cases} 2, & 0 \ leq n \ leq 4 \\ 0, & x> 다른 곳 \ end {cases} $
Solution −
x 2 (n)은 $ x_ {2} (n) = \ lbrace 2,2,2,2,2 \ rbrace Originalfirst $로 디코딩 할 수 있습니다.
x 1 (n)은 이전에 $ = \ lbrace 3, -2,3 \ rbrace = 3-2Z ^ {-1} + 2Z ^ {-2} $로 지정되었습니다.
마찬가지로 $ x_ {2} (z) = 2 + 2Z ^ {-1} + 2Z ^ {-2} + 2Z ^ {-3} + 2Z ^ {-4} $
결과 신호,
$ X (Z) = X_ {1} (Z) X_ {2} (z) $
$ = \ lbrace 3-2Z ^ {-1} + 2Z ^ {-2} \ rbrace \ times \ lbrace 2 + 2Z ^ {-1} + 2Z ^ {-2} + 2Z ^ {-3} + 2Z ^ {-4} \ rbrace $
$ = 6 + 2Z ^ {-1} + 6Z ^ {-2} + 6Z ^ {-3} + 6Z ^ {-4} + 6Z ^ {-5} $
위의 역 Z 변환을 취하면 결과 신호를 다음과 같이 얻을 수 있습니다.
$ x (n) = \ lbrace 6,2,6,6,6,0,4 \ rbrace $ 첫 번째 원점
Example 3 − 다음 두 신호의 컨볼 루션 결정 −
$x(n) = \lbrace 2,1,0,1\rbrace$
$h(n) = \lbrace 1,2,3,1\rbrace$
Solution −
신호의 Z- 변환을 취하면,
$ x (z) = 2 + 2Z ^ {-1} + 2Z ^ {-3} $
그리고 $ h (n) = 1 + 2Z ^ {-1} + 3Z ^ {-2} + Z ^ {-3} $
이제 두 신호의 컨볼 루션은 Z 변환의 곱셈을 의미합니다.
그것은 $ Y (Z) = X (Z) \ times h (Z) $입니다.
$ = \ lbrace 2 + 2Z ^ {-1} + 2Z ^ {-3} \ rbrace \ times \ lbrace 1 + 2Z ^ {-1} + 3Z ^ {-2} + Z ^ {-3} \ rbrace $
$ = \ lbrace 2 + 5Z ^ {-1} + 8Z ^ {-2} + 6Z ^ {-3} + 3Z ^ {-4} + 3Z ^ {-5} + Z ^ {-6} \ rbrace $
역 Z 변환을 취하면 결과 신호는 다음과 같이 쓸 수 있습니다.
$ y (n) = \ lbrace 2,5,8,6,6,1 \ rbrace Originalfirst $