デジタル信号処理-クイックガイド
定義
情報を運ぶものはすべて信号と呼ぶことができます。また、時間、温度、圧力、または音声信号やビデオ信号などの独立変数によって変化する物理量として定義することもできます。
信号の特性(振幅、形状、位相、周波数など)が変化する動作プロセスは、信号処理と呼ばれます。
Note−メイン信号に干渉する不要な信号は、ノイズと呼ばれます。したがって、ノイズも信号ですが、望ましくありません。
それらの表現と処理に従って、信号はさまざまなカテゴリに分類できます。詳細については、以下で説明します。
連続時報
連続時間信号は、時間の連続に沿って定義されるため、連続独立変数で表されます。連続時間信号は、しばしばアナログ信号と呼ばれます。
このタイプの信号は、振幅と時間の両方で連続性を示します。これらは、各時点で値を持ちます。正弦関数と余弦関数は、連続時間信号の最良の例です。
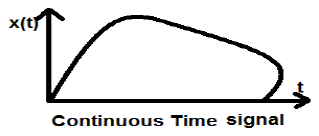
上記の信号は、各瞬間の信号の値を取得できるため、連続時間信号の例です。
離散時間信号
離散時間で定義される信号は、離散信号と呼ばれます。したがって、すべての独立変数には異なる値があります。したがって、それらは一連の数字として表されます。
音声信号とビデオ信号には、連続時間形式と離散時間形式の両方で表現できる特権があります。特定の状況下では、それらは同一です。振幅も離散的な特性を示します。この完璧な例はデジタル信号です。その振幅と時間は両方とも離散的です。
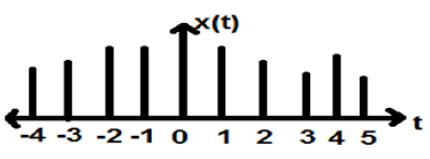
上の図は、ある期間にわたる離散信号の離散振幅特性を示しています。数学的には、これらのタイプの信号は次のように定式化できます。
$$x = \left \{ x\left [ n \right ] \right \},\quad -\infty < n< \infty$$ここで、nは整数です。
これは数xのシーケンスであり、シーケンスのn番目の数はx [n]として表されます。
システムをテストするには、通常、標準信号または基本信号が使用されます。これらの信号は、多くの複雑な信号の基本的な構成要素です。したがって、それらは信号とシステムの研究において非常に重要な役割を果たします。
単位インパルスまたはデルタ関数
条件を満たす信号は、 $\delta(t) = \lim_{\epsilon \to \infty} x(t)$ユニットインパルス信号として知られています。この信号は、t = 0の場合は無限大になる傾向があり、t≠0の場合はゼロになる傾向があるため、曲線の下の面積は常に1になります。デルタ関数は、t = 0でexcunit_impulse.jpgeptのどこでも振幅がゼロです。

ユニットインパルス信号の特性
- δ(t)は偶数信号です。
- δ(t)は、エネルギーでも電力でもない(NENP)信号の例です。
- 単位インパルス信号の面積は次のように書くことができます。 $$A = \int_{-\infty}^{\infty} \delta (t)dt = \int_{-\infty}^{\infty} \lim_{\epsilon \to 0} x(t) dt = \lim_{\epsilon \to 0} \int_{-\infty}^{\infty} [x(t)dt] = 1$$
- 信号の重みまたは強度は次のように書くことができます。 $$y(t) = A\delta (t)$$
- 加重インパルス信号の面積は次のように書くことができます- $$y (t) = \int_{-\infty}^{\infty} y (t)dt = \int_{-\infty}^{\infty} A\delta (t) = A[\int_{-\infty}^{\infty} \delta (t)dt ] = A = 1 = Wigthedimpulse$$
ユニットステップ信号
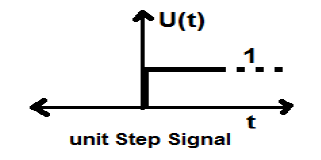
次の2つの条件を満たす信号-
- $U(t) = 1(when\quad t \geq 0 )and$
- $U(t) = 0 (when\quad t < 0 )$
単位ステップ信号として知られています。
これは、t = 0で不連続性を示す特性を持っています。不連続性のポイントでは、信号値は信号値の平均によって与えられます。この信号は、不連続点の直前と直後に取得されています(ギブズ現象による)。
時間スケーリングされた別のステップ信号にステップ信号を追加すると、結果は1になります。パワータイプの信号で、パワーの値は0.5です。RMS(二乗平均平方根)値は0.707であり、その平均値も0.5です。
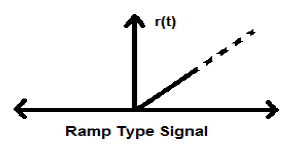
ランプ信号
ステップ信号を積分すると、ランプ信号になります。これはr(t)で表されます。ランプ信号も条件を満たす$r(t) = \int_{-\infty}^{t} U(t)dt = tU(t)$。エネルギーでも電力(NENP)タイプの信号でもありません。
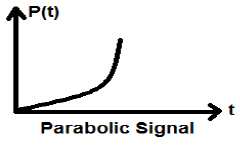
放物線信号
ランプ信号の統合は放物線信号につながります。これはp(t)で表されます。放物線信号も条件を満たします$p(t) = \int_{-\infty}^{t} r(t)dt = (t^{2}/2)U(t)$。エネルギーでも電力(NENP)タイプの信号でもありません。
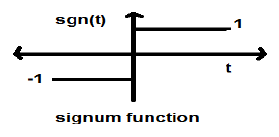
符号関数
この関数は次のように表されます。
$$sgn(t) = \begin{cases}1 & for\quad t >0\\-1 & for\quad t<0\end{cases}$$パワータイプの信号です。その電力値とRMS(二乗平均平方根)値はどちらも1です。符号関数の平均値はゼロです。
Sinc関数
これも正弦の関数であり、次のように記述されます。
$$SinC(t) = \frac{Sin\Pi t}{\Pi T} = Sa(\Pi t)$$Sinc関数のプロパティ
エネルギータイプの信号です。
$Sinc(0) = \lim_{t \to 0}\frac{\sin \Pi t}{\Pi t} = 1$
$Sinc(\infty) = \lim_{t \to \infty}\frac{\sin \Pi \infty}{\Pi \infty} = 0$ (sinπ∞の範囲は-1から+1の間で変化しますが、無限大で割ったものはすべてゼロに等しくなります)
-
場合 $ \sin c(t) = 0 => \sin \Pi t = 0$
$\Rightarrow \Pi t = n\Pi$
$\Rightarrow t = n (n \neq 0)$
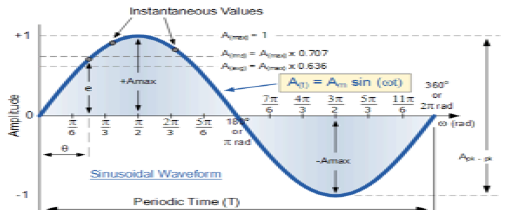
正弦波信号
本質的に連続である信号は、連続信号として知られています。正弦波信号の一般的な形式は次のとおりです。
$$x(t) = A\sin (\omega t + \phi )$$ここに、
A =信号の振幅
ω=信号の角周波数(ラジアンで測定)
φ=信号の位相角(ラジアンで測定)
この信号は一定時間後に繰り返される傾向があるため、周期信号と呼ばれます。信号の期間は次のように与えられます。
$$T = \frac{2\pi }{\omega }$$正弦波信号の概略図を以下に示します。
矩形関数
次の条件を満たす場合、信号は矩形関数型と呼ばれます。
$$\pi(\frac{t}{\tau}) = \begin{cases}1, & for\quad t\leq \frac{\tau}{2}\\0, & Otherwise\end{cases}$$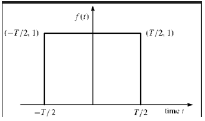
Y軸に対して対称であるため、この信号は偶数信号と呼ばれます。
三角パルス信号
以下の条件を満たす信号は、三角波信号と呼ばれます。
$$\Delta(\frac{t}{\tau}) = \begin{cases}1-(\frac{2|t|}{\tau}) & for|t|<\frac{\tau}{2}\\0 & for|t|>\frac{\tau}{2}\end{cases}$$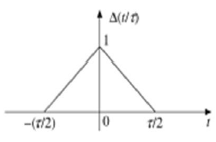
この信号はY軸に対して対称です。したがって、それは偶数信号とも呼ばれます。
基本的な信号を連続時間領域でどのように表現できるかを見てきました。基本的な信号を離散時間領域でどのように表現できるかを見てみましょう。
ユニットインパルスシーケンス
離散時間領域ではδ(n)として表され、次のように定義できます。
$$\delta(n)=\begin{cases}1, & for \quad n=0\\0, & Otherwise\end{cases}$$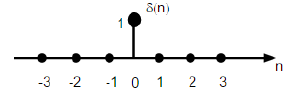
ユニットステップ信号
離散時間単位ステップ信号は次のように定義されます。
$$U(n)=\begin{cases}1, & for \quad n\geq0\\0, & for \quad n<0\end{cases}$$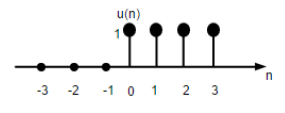
上の図は、離散ステップ関数のグラフ表示を示しています。
ユニットランプ機能
離散ユニットランプ関数は、次のように定義できます。
$$r(n)=\begin{cases}n, & for \quad n\geq0\\0, & for \quad n<0\end{cases}$$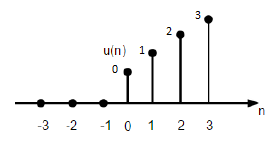
上図は、離散ランプ信号のグラフ表示を示しています。
放物線関数
離散単位放物関数はp(n)として表され、次のように定義できます。
$$p(n) = \begin{cases}\frac{n^{2}}{2} ,& for \quad n\geq0\\0, & for \quad n<0\end{cases}$$単位ステップ関数に関しては、次のように書くことができます。
$$P(n) = \frac{n^{2}}{2}U(n)$$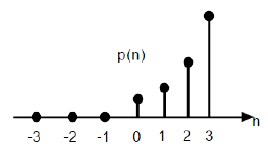
上の図は、放物線シーケンスのグラフィック表現を示しています。
正弦波信号
すべての連続時間信号は周期的です。離散時間正弦波シーケンスは、周期的である場合とそうでない場合があります。それらはωの値に依存します。離散時間信号が周期的であるためには、角周波数ωは2πの有理数倍でなければなりません。
離散正弦波信号を上の図に示します。
正弦波信号の離散形式は、次の形式で表すことができます。
$$x(n) = A\sin(\omega n + \phi)$$ここで、A、ω、φは通常の意味を持ち、nは整数です。離散正弦波信号の期間は、次の式で与えられます。
$$N =\frac{2\pi m}{\omega}$$ここで、Nとmは整数です。
連続時間信号は、信号に対して実行されるさまざまな条件または操作に従って分類できます。
偶数および奇数信号
信号さえ
信号は、次の条件を満たす場合でも信号であると言われます。
$$x(-t) = x(t)$$信号の時間反転は、ここでは振幅の変化を意味しません。たとえば、以下に示す三角波について考えてみます。
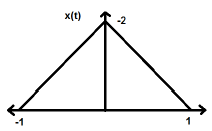
三角波信号は偶数信号です。なので、Y軸に対して対称です。Y軸周りの鏡像と言えます。
次の図に示すような別の信号について考えてみます。
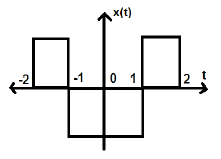
上記の信号は、Y軸に対して対称であるため均一であることがわかります。
奇数信号
次の条件を満たす場合、信号は奇数と呼ばれます。
$$x(-t) = -x(t)$$ここでは、時間反転と振幅変化の両方が同時に発生します。
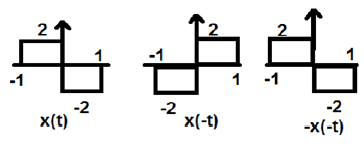
上の図では、ステップ信号x(t)を見ることができます。それが奇数信号であるかどうかをテストするために、最初に時間反転、つまりx(-t)を実行すると、結果は図のようになります。次に、結果の信号の振幅、つまり–x(-t)を逆にすると、図に示すような結果が得られます。
1番目と3番目の波形を比較すると、それらが同じであることがわかります。つまり、x(t)= -x(-t)であり、基準を満たしています。したがって、上記の信号は奇数信号です。
偶数信号と奇数信号に関連するいくつかの重要な結果を以下に示します。
- 偶数×偶数=偶数
- 奇数×奇数=偶数
- 偶数×奇数=奇数
- 偶数±偶数=偶数
- 奇数±奇数=奇数
- 偶数±奇数=偶数でも奇数でもない
信号を偶数または奇数形式で表現する
一部の信号は、偶数タイプまたは奇数タイプに直接分類できません。これらは、偶数信号と奇数信号の両方の組み合わせとして表されます。
$$x(t)\rightarrow x_{e}(t)+x_{0}(t)$$ここで、x e(t)は偶数信号を表し、x o(t)は奇数信号を表します。
$$x_{e}(t)=\frac{[x(t)+x(-t)]}{2}$$そして
$$x_{0}(t)=\frac{[x(t)-x(-t)]}{2}$$例
信号の偶数部分と奇数部分を見つけます $x(n) = t+t^{2}+t^{3}$
Solution − x(n)を逆にすると、次のようになります。
$$x(-n) = -t+t^{2}-t^{3}$$
さて、式によれば、偶数の部分
$$x_{e}(t) = \frac{x(t)+x(-t)}{2}$$
$$= \frac{[(t+t^{2}+t^{3})+(-t+t^{2}-t^{3})]}{2}$$
$$= t^{2}$$
同様に、式によれば、奇数部分は
$$x_{0}(t)=\frac{[x(t)-x(-t)]}{2}$$
$$= \frac{[(t+t^{2}+t^{3})-(-t+t^{2}-t^{3})]}{2}$$
$$= t+t^{3}$$
周期的および非周期的信号
周期的な信号
周期的な信号は、一定の時間間隔の後に繰り返されます。これを方程式の形で次のように示すことができます。
$$x(t) = x(t)\pm nT$$ここで、n =整数(1,2,3……)
T =基本期間(FTP)≠0および≠∞
基本期間(FTP)は、信号が周期的である時間の最小の正の固定値です。
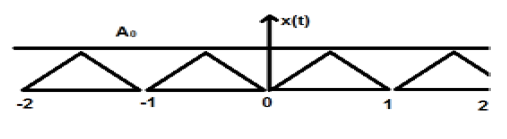
上の図に振幅Aの三角波信号が示されています。ここでは、信号は1秒ごとに繰り返されています。したがって、信号は周期的であり、FTPは1秒であると言えます。
非周期信号
簡単に言えば、周期的ではない信号は本質的に非周期的であると言えます。明らかなように、これらの信号は、間隔を置いても繰り返されません。
非周期的な信号は特定の形式に従いません。したがって、特定の数式でそれらを説明することはできません。
エネルギーおよび電力信号
含まれる総エネルギーが有限で非ゼロ(0 <E <∞)である場合に限り、信号はエネルギー信号であると言われます。したがって、どのエネルギータイプの信号でも、正規化された信号の合計は有限でゼロではありません。
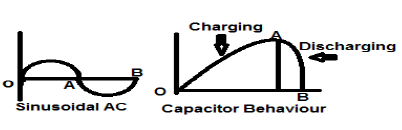
正弦波AC電流信号は、ある場合には正の半サイクルにあり、次の半サイクルでは負になるため、エネルギータイプの信号の完璧な例です。したがって、その平均電力はゼロになります。
無損失コンデンサは、エネルギータイプの信号の完璧な例でもあります。これは、ソースに接続すると最適なレベルまで充電され、ソースを取り外すと、負荷を介して同じ量のエネルギーを消費し、平均電力をゼロ。
任意の有限信号x(t)の場合、エネルギーはEとして記号化でき、次のように記述されます。
$$E = \int_{-\infty}^{+\infty} x^{2}(t)dt$$エネルギータイプの信号のスペクトル密度は、さまざまな周波数レベルで分散されるエネルギーの量を示します。
パワータイプ信号
正規化された平均電力が有限でゼロ以外(0 <p <∞)である場合に限り、信号は電力タイプの信号と呼ばれます。パワータイプの信号の場合、正規化された平均パワーは有限でゼロ以外です。ほとんどすべての周期信号は電力信号であり、それらの平均電力は有限でゼロではありません。
数学的な形式では、信号x(t)のパワーは次のように書くことができます。
$$P = \lim_{T \rightarrow \infty}1/T\int_{-T/2}^{+T/2} x^{2}(t)dt$$エネルギー信号と電力信号の違い
次の表は、エネルギー信号と電力信号の違いをまとめたものです。
| 電源信号 | エネルギー信号 |
|---|---|
| 実用的な周期信号は電力信号です。 | 非周期信号はエネルギー信号です。 |
| ここで、正規化された平均パワーは有限でゼロではありません。 | ここで、正規化された総エネルギーは有限でゼロではありません。 |
| 数学的には、 $$P = \lim_{T \rightarrow \infty}1/T\int_{-T/2}^{+T/2} x^{2}(t)dt$$ |
数学的には、 $$E = \int_{-\infty}^{+\infty} x^{2}(t)dt$$ |
| これらの信号の存在は、時間の経過とともに無限になります。 | これらの信号は限られた期間存在します。 |
| 電力信号のエネルギーは、無限の時間にわたって無限です。 | エネルギー信号のパワーは、無限の時間にわたってゼロです。 |
解決された例
Example 1 −信号のパワーを見つける $z(t) = 2\cos(3\Pi t+30^{o})+4\sin(3\Pi +30^{o})$
Solution−上記の2つの信号は、周波数項が互いに同一であり、位相差も同じであるため、互いに直交しています。したがって、総電力は個々の電力の合計になります。
しましょう $z(t) = x(t)+y(t)$
どこ $x(t) = 2\cos (3\Pi t+30^{o})$ そして $y(t) = 4\sin(3\Pi +30^{o})$
の力 $x(t) = \frac{2^{2}}{2} = 2$
の力 $y(t) = \frac{4^{2}}{2} = 8$
したがって、 $P(z) = p(x)+p(y) = 2+8 = 10$…Ans。
Example 2 −与えられた信号が $x(t) = t^{2}+j\sin t$ 共役かどうか?
Solution−ここで、t 2である実数部は偶数であり、奇数部(虚数)は$\sin t$奇妙です。したがって、上記の信号は共役信号です。
Example 3 −かどうかを確認します $X(t)= \sin \omega t$ 奇数信号または偶数信号です。
Solution −与えられた $X(t) = \sin \omega t$
時間の逆転によって、私たちは得るでしょう $\sin (-\omega t)$
しかし、私たちはそれを知っています $\sin(-\phi) = -\sin \phi$。
したがって、
$$\sin (-\omega t) = -\sin \omega t$$これは、信号が奇数であるという条件を満たすことです。したがって、$\sin \omega t$ 奇数信号です。
連続時間信号と同様に、離散時間信号は、信号の状態または操作に従って分類できます。
偶数および奇数信号
信号さえ
信号が次の条件を満たす場合、信号は偶数または対称であると言われます。
$$x(-n) = x(n)$$
ここで、x(-1)= x(1)、x(-2)= x(2)、およびx(-n)= x(n)であることがわかります。したがって、それは偶数信号です。
奇数信号
次の条件を満たす場合、信号は奇数と呼ばれます。
$$x(-n) = -x(n)$$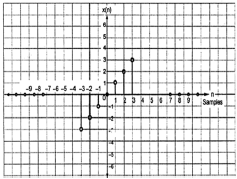
この図から、x(1)= -x(-1)、x(2)= -x(2)、およびx(n)= -x(-n)であることがわかります。したがって、それは反対称信号であると同時に奇数信号でもあります。
周期的および非周期的信号
離散時間信号は、次の条件を満たす場合にのみ周期的です。
$$x(n+N) = x(n)$$ここで、x(n)信号はN周期後に繰り返されます。これは、コサイン信号を考慮することで最もよく理解できます。
$$x(n) = A \cos(2\pi f_{0}n+\theta)$$ $$x(n+N) = A\cos(2\pi f_{0}(n+N)+\theta) = A\cos(2\pi f_{0}n+2\pi f_{0}N+\theta)$$ $$= A\cos(2\pi f_{0}n+2\pi f_{0}N+\theta)$$信号が周期的になるためには、以下の条件を満たす必要があります。
$$x(n+N) = x(n)$$ $$\Rightarrow A\cos(2\pi f_{0}n+2\pi f_{0}N+\theta) = A \cos(2\pi f_{0}n+\theta)$$すなわち $2\pi f_{0}N$ の整数倍です $2\pi$
$$2\pi f_{0}N = 2\pi K$$ $$\Rightarrow N = \frac{K}{f_{0}}$$離散正弦波信号の周波数は、次の整数倍で分離されます。 $2\pi$。
エネルギーおよび電力信号
エネルギー信号
離散時間信号のエネルギーはEで表されます。数学的には、次のように書くことができます。
$$E = \displaystyle \sum\limits_{n=-\infty}^{+\infty}|x(n)|^2$$の個々の値が $x(n)$二乗して加算すると、エネルギー信号が得られます。ここに$x(n)$ はエネルギー信号であり、そのエネルギーは時間の経過とともに有限です。つまり、$ 0 <E <\ infty $
電力信号
離散信号の平均パワーはPとして表されます。数学的には、これは次のように書くことができます。
$$P = \lim_{N \to \infty} \frac{1}{2N+1}\displaystyle\sum\limits_{n=-N}^{+N} |x(n)|^2$$ここで、パワーは有限です。つまり、0 <P <∞です。ただし、エネルギータイプの信号にも電力タイプの信号にも属さない信号もあります。
それらに対して実行された操作の結果である他の信号があります。いくつかの一般的なタイプの信号について、以下で説明します。
共役信号
条件を満たす信号 $x(t) = x*(-t)$ 共役信号と呼ばれます。
しましょう $x(t) = a(t)+jb(t)$... eqn。1
そう、 $x(-t) = a(-t)+jb(-t)$
そして $x*(-t) = a(-t)-jb(-t)$... eqn。2
条件により、 $x(t) = x*(-t)$
導出された方程式1と2の両方を比較すると、実数部は偶数であるのに対し、虚数部は奇数であることがわかります。これは、信号が共役型であるための条件です。
反対称信号の共役
条件を満たす信号 $x(t) = -x*(-t)$ 共役反対称信号と呼ばれます
しましょう $x(t) = a(t)+jb(t)$... eqn。1
そう $x(-t) = a(-t)+jb(-t)$
そして $x*(-t) = a(-t)-jb(-t)$
$-x*(-t) = -a(-t)+jb(-t)$... eqn。2
条件別 $x(t) = -x*(-t)$
ここで、共役信号の場合と同じように、両方の方程式をもう一度比較します。ここで、実数部が奇数で虚数部が偶数であることがわかります。これは、信号が共役反対称型になるための条件です。
例
与えられた信号を $x(t) = \sin t+jt^{2}$。
ここで、本当の部分は $\sin t$ 奇妙で、虚数部は $t^2$均等です。したがって、この信号は共役反対称信号として分類できます。
どの機能も2つの部分に分けることができます。1つの部分は共役対称であり、他の部分は共役反対称です。したがって、任意の信号x(t)は次のように書くことができます。
$$x(t) = xcs(t)+xcas(t)$$どこ $xcs(t)$ は共役対称信号であり、 $xcas(t)$ 共役反対称信号です
$$xcs(t) = \frac{[x(t)+x*(-t)]}{2}$$そして
$$xcas(t) = \frac{[x(t)-x*(-t)]}{2}$$半波対称信号
信号が条件を満たす場合 $cx(t) = -x(t\pm (\frac{T_{0}}{2}))$、それは半波対称信号と呼ばれます。ここでは、信号の振幅反転とタイムシフトが半分の時間で発生します。半波対称信号の場合、平均値はゼロになりますが、状況が逆転した場合はそうではありません。
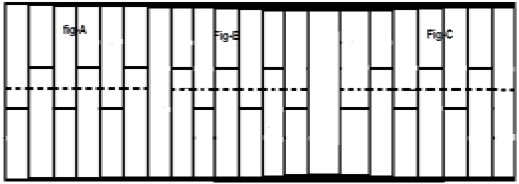
上の図Aに示すような信号x(t)について考えてみます。最初のステップは、信号をタイムシフトして作成することです$x[t-(\frac{T}{2})]$。そのため、図Bに示すように、新しい信号が変更されます。次に、信号の振幅を逆にします。$-x[t-(\frac{T}{2})]$ 図Cに示すように、この信号はハーフタイムシフトと振幅の反転の後に繰り返されるため、半波対称信号です。
直交信号
2つの信号x(t)とy(t)は、次の2つの条件を満たす場合、直交していると言われます。
Condition 1 − $\int_{-\infty}^{\infty}x(t)y(t) = 0$ 【非周期信号用】
Condition 2 − $\int x(t)y(t) = 0$ 【周期信号用】
奇数次高調波(3次、5次、7次など)を含み、周波数が異なる信号は、相互に直交しています。
三角関数タイプの信号では、正弦関数と余弦関数も互いに直交しています。ただし、それらは同じ周波数を持ち、同じ位相にあります。同様に、DC(直流信号)と正弦波信号も互いに直交しています。x(t)とy(t)が2つの直交信号であり、$z(t) = x(t)+y(t)$ その場合、z(t)のパワーとエネルギーは次のように書くことができます。
$$P(z) = p(x)+p(y)$$ $$E(z) = E(x)+E(y)$$例
信号を分析します。 $z(t) = 3+4\sin(2\pi t+30^0)$
ここで、信号はDC信号(3)と1つの正弦関数で構成されます。したがって、プロパティにより、この信号は直交信号であり、その中の2つのサブ信号は互いに直交しています。
シフトとは、時間領域(Y軸の周り)または振幅領域(X軸の周り)での信号の移動を意味します。したがって、シフトを時間シフトと振幅シフトという2つのカテゴリに分類できます。これらについては、後で説明します。
タイムシフト
タイムシフトとは、時間領域での信号のシフトを意味します。数学的には、次のように書くことができます
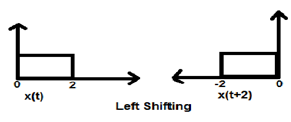
$$x(t) \rightarrow y(t+k)$$このK値は、正の場合も負の場合もあります。k値の符号によると、右シフトと左シフトという2種類のシフトがあります。
ケース1(K> 0)
Kがゼロより大きい場合、信号のシフトは時間領域の「左」に向かって行われます。したがって、このタイプのシフトは、信号の左シフトとして知られています。
Example
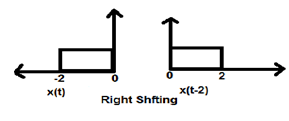
ケース2(K <0)
Kがゼロ未満の場合、信号のシフトは時間領域で右に向かって行われます。したがって、このタイプのシフトは右シフトと呼ばれます。
Example
下の図は、信号が2だけ右にシフトしていることを示しています。
振幅偏移変調
振幅偏移変調とは、振幅領域(X軸周り)で信号をシフトすることを意味します。数学的には、次のように表すことができます。
$$x(t) \rightarrow x(t)+K$$このK値は、正または負の場合があります。したがって、以下で説明する2種類の振幅偏移変調があります。
ケース1(K> 0)
Kがゼロより大きい場合、信号のシフトはx軸の上方に向かって行われます。したがって、このタイプのシフトは上向きシフトとして知られています。
Example
次のように与えられる信号x(t)を考えてみましょう。
$$x = \begin{cases}0, & t < 0\\1, & 0\leq t\leq 2\\ 0, & t>0\end{cases}$$新しい信号を-と書くことができるように、K = +1を取りました。
$y(t) \rightarrow x(t)+1$ したがって、y(t)は最終的に次のように書くことができます。
$$x(t) = \begin{cases}1, & t < 0\\2, & 0\leq t\leq 2\\ 1, & t>0\end{cases}$$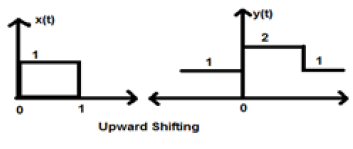
ケース2(K <0)
Kがゼロ未満の場合、信号のシフトはX軸で下向きに発生します。したがって、それは信号の下方シフトと呼ばれます。
Example
次のように与えられる信号x(t)を考えてみましょう。
$$x(t) = \begin{cases}0, & t < 0\\1, & 0\leq t\leq 2\\ 0, & t>0\end{cases}$$K = -1とすると、新しい信号は次のように記述できます。
$y(t)\rightarrow x(t)-1$ したがって、y(t)は最終的に次のように書くことができます。
$$y(t) = \begin{cases}-1, & t < 0\\0, & 0\leq t\leq 2\\ -1, & t>0\end{cases}$$
信号のスケーリングとは、定数に信号の時間または振幅を掛けることを意味します。
タイムスケーリング
定数が時間軸に乗算される場合、それは時間スケーリングとして知られています。これは数学的に次のように表すことができます。
$x(t) \rightarrow y(t) = x(\alpha t)$ または $x(\frac{t}{\alpha})$; ここで、α≠0
したがって、y軸が同じである場合、x軸の大きさは、定数の符号(正または負)に応じて増減します。したがって、スケーリングは、以下で説明するように2つのカテゴリに分類することもできます。
時間圧縮
アルファがゼロより大きい場合は常に、信号の振幅がアルファで除算されますが、Y軸の値は同じままです。これは時間圧縮として知られています。
Example
次の図のように示されている信号x(t)を考えてみましょう。alphaの値を2とすると、y(t)はx(2t)になります。これは、次の図に示されています。

明らかに、上記の図から、y軸の時間の大きさは同じままですが、x軸の振幅が4から2に減少していることがわかります。したがって、これは時間圧縮の場合です。
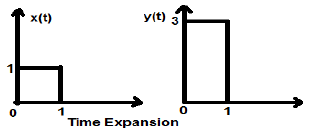
時間拡張
時間を一定のアルファで割ると、信号のY軸の大きさがアルファ倍になり、X軸の大きさはそのままになります。したがって、これを時間拡張型信号と呼びます。
Example
大きさが1の方形信号x(t)を考えてみましょう。定数3で時間スケーリングすると、次のようになります。 $x(t) \rightarrow y(t) \rightarrow x(\frac{t}{3})$の場合、信号の振幅は次の図に示すように3倍に変更されます。
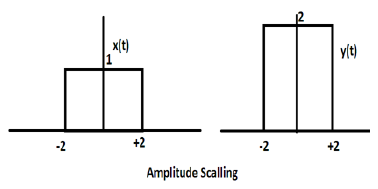
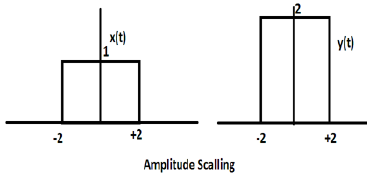
振幅スケーリング
定数と信号の振幅を乗算すると、振幅スケーリングが発生します。定数の符号に応じて、振幅スケーリングまたは減衰のいずれかになります。方形波信号x(t)=Π(t / 4)を考えてみましょう。
別の関数y(t)=2Π(t / 4)を定義するとします。この場合、y軸の値は2倍になり、時間軸の値はそのままになります。以下の図に、を示します。
z(t)=0.5Π(t / 4)であるz(t)として定義される別の方形波関数について考えてみます。ここで、関数z(t)の振幅はx(t)の振幅の半分になります。つまり、時間軸は同じままで、振幅軸は半分になります。これは、次の図に示されています。
信号の時間が-1倍になると、信号は反転します。Y軸またはX軸を中心に鏡像を生成します。これは、信号の反転として知られています。
反転は、信号の時間または振幅に-1を掛けるかどうかの条件に基づいて、2つのタイプに分類できます。
時間反転
信号の時間が-1で乗算されるときはいつでも、それは信号の時間反転として知られています。この場合、信号はY軸を中心に鏡像を生成します。数学的には、これは次のように書くことができます。
$$x(t) \rightarrow y(t) \rightarrow x(-t)$$これは、次の例で最もよく理解できます。

上記の例では、信号がY軸を中心に反転していることがはっきりとわかります。つまり、これも一種の時間スケーリングですが、ここではスケーリング量は常に(-1)です。
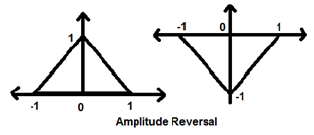
振幅反転
信号の振幅に-1を掛けると、振幅反転と呼ばれます。この場合、信号はX軸を中心に鏡像を生成します。数学的には、これは次のように書くことができます。
$$x(t)\rightarrow y(t)\rightarrow -x(t)$$次の例を考えてみましょう。振幅の反転がはっきりと見られます。
信号に対して実行される2つの非常に重要な操作は、微分と積分です。
差別化
任意の信号x(t)の微分は、時間に対するその信号の勾配表現を意味します。数学的には、次のように表されます。
$$x(t)\rightarrow \frac{dx(t)}{dt}$$OPAMPの差別化の場合、この方法論は非常に役立ちます。式を使用するのではなく、信号をグラフィカルに簡単に区別できます。ただし、条件は、信号が長方形または三角形のタイプである必要があることです。これはほとんどの場合に発生します。
| 元の信号 | 分化した信号 |
|---|---|
| ランプ | ステップ |
| ステップ | インパルス |
| インパルス | 1 |
上記の表は、微分後の信号の状態を示しています。たとえば、ランプ信号は微分後にステップ信号に変換されます。同様に、単位ステップ信号はインパルス信号になります。
例
私たちに与えられた信号を $x(t) = 4[r(t)-r(t-2)]$。この信号をプロットすると、下図の左側のようになります。今、私たちの目的は、与えられた信号を区別することです。
まず、与えられた方程式の微分を開始します。微分後のランプ信号が単位ステップ信号を与えることがわかっています。
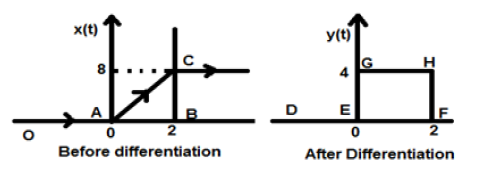
したがって、結果の信号y(t)は次のように書くことができます。
$y(t) = \frac{dx(t)}{dt}$
$= \frac{d4[r(t)-r(t-2)]}{dt}$
$= 4[u(t)-u(t-2)]$
これで、この信号が最終的にプロットされます。これは、上の図の右側に示されています。
任意の信号の統合とは、特定の時間領域でその信号を合計して、変更された信号を取得することを意味します。数学的には、これは次のように表すことができます。
$$x(t)\rightarrow y(t) = \int_{-\infty}^{t}x(t)dt$$ここでも、ほとんどの場合、数学的積分を実行して結果の信号を見つけることができますが、長方形の形式でグラフィカルに描かれている信号の場合、すばやく連続して直接積分することができます。微分と同様に、ここでも、結果をすばやく取得するためにテーブルを参照します。
| 元の信号 | 統合信号 |
|---|---|
| 1 | インパルス |
| インパルス | ステップ |
| ステップ | ランプ |
例
信号を考えてみましょう $x(t) = u(t)-u(t-3)$。下の図-1に示します。明らかに、それがステップ信号であることがわかります。今、それを統合します。表を参照すると、ステップ信号の積分によりランプ信号が生成されることがわかります。
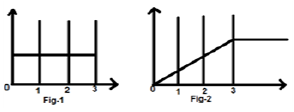
ただし、数学的に計算します。
$y(t) = \int_{-\infty}^{t}x(t)dt$
$= \int_{-\infty}^{t}[u(t)-u(t-3)]dt$
$= \int_{-\infty}^{t}u(t)dt-\int_{-\infty}^{t}u(t-3)dt$
$= r(t)-r(t-3)$
同じことが図2に示すようにプロットされます。
時間領域での2つの信号の畳み込みは、周波数領域でのそれらの表現の乗算に相当します。数学的には、2つの信号の畳み込みを次のように書くことができます。
$$y(t) = x_{1}(t)*x_{2}(t)$$ $$= \int_{-\infty}^{\infty}x_{1}(p).x_{2}(t-p)dp$$畳み込みの手順
- 信号Xテイク1(t)をとt = PそれはXがあることを置く1(p)を。
- 信号Xテイク2(t)を、ステップ1を行うと、それは、X作る2(p)を。
- 信号を折りたたむ、つまりx 2(-p)にします。
- 上記信号xからシフト時間行う2 [ - (PT)]を
- 次に、両方の信号の乗算を行います。すなわち$x_{1}(p).x_{2}[−(p−t)]$
例
ステップ信号u(t)を独自の種類で畳み込みます。
$y(t) = u(t)*u(t)$
$= \int_{-\infty}^{\infty}[u(p).u[-(p-t)]dp$
これで、このtはゼロより大きくても小さくてもかまいません。これを下の図に示します。
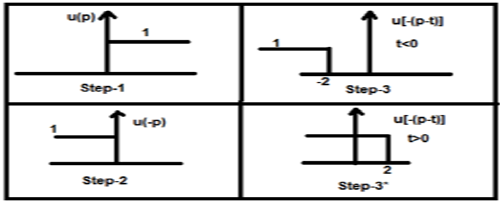
したがって、上記の場合、結果は次の可能性で発生します
$y(t) = \begin{cases}0, & if\quad t<0\\\int_{0}^{t}1dt, & for\quad t>0\end{cases}$
$= \begin{cases}0, & if\quad t<0\\t, & t>0\end{cases} = r(t)$
畳み込みのプロパティ
可換
畳み込みの順序は重要ではないと述べています。これは数学的に次のように示すことができます。
$$x_{1}(t)*x_{2}(t) = x_{2}(t)*x_{1}(t)$$連想
それは、3つの信号を含む畳み込みの順序は何でもよいと述べています。数学的には、次のように表示できます。
$$x_{1}(t)*[x_{2}(t)*x_{3}(t)] = [x_{1}(t)*x_{2}(t)]*x_{3}(t)$$分配法則
最初に2つの信号を追加してから、3番目の信号に畳み込みを行うことができます。これは、2つの信号を個別に3番目の信号で畳み込み、最後に追加するのと同じです。数学的には、これは次のように書くことができます。
$$x_{1}(t)*[x_{2}(t)+x_{3}(t)] = [x_{1}(t)*x_{2}(t)+x_{1}(t)*x_{3}(t)]$$範囲
信号が2つの信号の畳み込みの結果である場合、信号の面積はそれらの個々の信号の乗算です。数学的にこれは書くことができます
場合 $y(t) = x_{1}*x_{2}(t)$
次に、y(t)の面積= x 1の面積(t)X x 2の面積(t)
スケーリング
2つの信号が未知の定数「a」にスケーリングされ、畳み込みが行われると、結果の信号も同じ定数「a」に畳み込まれ、以下に示すようにその量で除算されます。
もし、 $x_{1}(t)*x_{2}(t) = y(t)$
次に、 $x_{1}(at)*x_{2}(at) = \frac{y(at)}{a}, a \ne 0$
ディレイ
信号y(t)が2つの信号x1(t)とx2(t)の畳み込みの結果であると仮定します。2つの信号がそれぞれ時間t1とt2だけ遅延した場合、結果の信号y(t)は(t1 + t2)だけ遅延します。数学的には、次のように書くことができます。
もし、 $x_{1}(t)*x_{2}(t) = y(t)$
次に、 $x_{1}(t-t_{1})*x_{2}(t-t_{2}) = y[t-(t_{1}+t_{2})]$
解決された例
Example 1 −信号u(t-1)とu(t-2)の畳み込みを見つけます。
Solution−与えられた信号はu(t-1)とu(t-2)です。それらの畳み込みは、以下に示すように実行できます。
$y(t) = u(t-1)*u(t-2)$
$y(t) = \int_{-\infty}^{+\infty}[u(t-1).u(t-2)]dt$
$= r(t-1)+r(t-2)$
$= r(t-3)$
Example 2 −によって与えられる2つの信号の畳み込みを見つけます
$x_{1}(n) = \lbrace 3,-2, 2\rbrace $
$x_{2}(n) = \begin{cases}2, & 0\leq n\leq 4\\0, & x > elsewhere\end{cases}$
Solution −
x 2(n)は次のようにデコードできます$x_{2}(n) = \lbrace 2,2,2,2,2\rbrace Originalfirst$
x 1(n)は以前に与えられた$= \lbrace 3,-2,3\rbrace = 3-2Z^{-1}+2Z^{-2}$
同様に、 $x_{2}(z) = 2+2Z^{-1}+2Z^{-2}+2Z^{-3}+2Z^{-4}$
結果の信号、
$X(Z) = X_{1}(Z)X_{2}(z)$
$= \lbrace 3-2Z^{-1}+2Z^{-2}\rbrace \times \lbrace 2+2Z^{-1}+2Z^{-2}+2Z^{-3}+2Z^{-4}\rbrace$
$= 6+2Z^{-1}+6Z^{-2}+6Z^{-3}+6Z^{-4}+6Z^{-5}$
上記の逆Z変換を行うと、結果の信号は次のようになります。
$x(n) = \lbrace 6,2,6,6,6,0,4\rbrace$ 最初の起源
Example 3 −次の2つの信号の畳み込みを決定します−
$x(n) = \lbrace 2,1,0,1\rbrace$
$h(n) = \lbrace 1,2,3,1\rbrace$
Solution −
信号のZ変換を行うと、次のようになります。
$x(z) = 2+2Z^{-1}+2Z^{-3}$
そして $h(n) = 1+2Z^{-1}+3Z^{-2}+Z^{-3}$
ここで、2つの信号の畳み込みは、それらのZ変換の乗算を意味します
あれは $Y(Z) = X(Z) \times h(Z)$
$= \lbrace 2+2Z^{-1}+2Z^{-3}\rbrace \times \lbrace 1+2Z^{-1}+3Z^{-2}+Z^{-3}\rbrace$
$= \lbrace 2+5Z^{-1}+8Z^{-2}+6Z^{-3}+3Z^{-4}+3Z^{-5}+Z^{-6}\rbrace$
逆Z変換を行うと、結果の信号は次のように記述できます。
$y(n) = \lbrace 2,5,8,6,6,1 \rbrace Originalfirst$
一部のシステムにはフィードバックがあり、一部にはありません。フィードバックシステムを持たないものは、それらの出力は入力の現在の値にのみ依存します。その時点では、データの過去の値は存在しません。これらのタイプのシステムは、静的システムとして知られています。将来の価値にも依存しません。
これらのシステムには過去の記録がないため、メモリもありません。したがって、すべての静的システムはメモリのないシステムであると言えます。この概念をよりよく理解するために例を見てみましょう。
例
以下のシステムが静的システムであるかどうかを確認しましょう。
- $y(t) = x(t)+x(t-1)$
- $y(t) = x(2t)$
- $y(t) = x = \sin [x(t)]$
a) $y(t) = x(t)+x(t-1)$
ここで、x(t)は現在価値です。過去の時間とは関係ありません。つまり、静的システムです。ただし、x(t-1)の場合、t = 0とすると、過去の値に依存するx(-1)になります。したがって、静的ではありません。したがって、ここでy(t)は静的システムではありません。
b) $y(t) = x(2t)$
t = 2に置き換えると、結果はy(t)= x(4)になります。繰り返しますが、それは将来の価値に依存します。したがって、静的システムでもありません。
c) $y(t) = x = \sin [x(t)]$
この式では、正弦関数を扱っています。正弦関数の範囲は-1から+1の範囲内です。したがって、x(t)の代わりに使用する値が何であれ、-1から+1の間になります。したがって、過去または将来の値に依存していないと言えます。したがって、それは静的システムです。
上記の例から、次の結論を導き出すことができます-
- タイムシフトのあるシステムは静的ではありません。
- 振幅偏移を備えたシステムも静的ではありません。
- 統合と差別化のケースも静的ではありません。
システムが任意の時点での信号の過去と将来の値に依存している場合、それは動的システムとして知られています。静的システムとは異なり、これらはメモリレスシステムではありません。それらは過去と未来の値を保存します。したがって、ある程度のメモリが必要です。いくつかの例を通して、この理論をよりよく理解しましょう。
例
次のシステムが動的であるかどうかを調べます。
a) $y(t) = x(t+1)$
この場合、方程式にt = 1を入れると、将来の依存値であるx(2)に変換されます。ここでは入力を1として指定していますが、x(2)の値を示しているためです。それは将来に依存する信号であるため、明らかに動的システムです。
b) $y(t) = Real[x(t)]$
$$= \frac{[x(t)+x(t)^*]}{2}$$この場合、どのような値を設定しても、その時間の実際の値のシグナルが表示されます。将来または過去の値には依存しません。したがって、それは動的システムではなく、静的システムです。
c) $y(t) = Even[x(t)]$
$$= \frac{[x(t)+x(-t)]}{2}$$ここで、t = 1に置き換えると、1つの信号はx(1)を示し、別の信号は過去の値であるx(-1)を示します。同様に、t = -1とすると、1つの信号はx(-1)を示し、別の信号は将来の値であるx(1)を示します。したがって、明らかにそれは動的システムの場合です。
d) $y(t) = \cos [x(t)]$
この場合、システムは余弦関数であるため、-1から+1の間にある特定の値のドメインがあります。したがって、どのような値を設定しても、指定された制限内で結果が得られます。したがって、それは静的システムです
上記の例から、次の結論を導き出すことができます-
- すべてのタイムシフトケース信号は動的信号です。
- 時間スケーリングの場合も、すべての信号は動的信号です。
- 積分ケース信号は動的信号です。
以前、静的になるには、システムが将来および過去の値から独立している必要があることを確認しました。この場合、条件はほとんど変更なしでほぼ同じです。ここで、システムが因果関係を持つためには、将来の値からのみ独立している必要があります。つまり、過去の依存関係によって、システムが原因になることは問題になりません。
因果的システムは、実際的または物理的に実現可能なシステムです。これをよりよく理解するために、いくつかの例を考えてみましょう。
例
次の信号を考えてみましょう。
a) $y(t) = x(t)$
ここで、信号はxの現在の値にのみ依存します。たとえば、t = 3に置き換えると、結果はその瞬間にのみ表示されます。したがって、将来価値に依存しないため、因果システムと呼ぶことができます。
b) $y(t) = x(t-1)$
ここでは、システムは過去の値に依存しています。たとえば、t = 3に置き換えると、式はx(2)になります。これは、入力に対する過去の値です。決して、それは将来の価値に依存しません。したがって、このシステムは因果システムでもあります。
c) $y(t) = x(t)+x(t+1)$
この場合、システムには2つの部分があります。前に説明したように、部分x(t)は現在価値のみに依存します。したがって、問題はありません。ただし、x(t + 1)の場合、t = 1とすると、式は将来の値であるx(2)に減少するため、明らかに将来の値に依存します。したがって、因果関係はありません。
非因果的システムは、因果的システムのそれとは正反対です。システムが任意の時点での入力の将来の値に依存している場合、そのシステムは非因果的システムであると言われます。
例
いくつかの例を取り上げて、これをより良い方法で理解してみましょう。
a) $y(t) = x(t+1)$
このシステムについては、因果システムについてもすでに説明しました。どのような入力でも、システムは将来の価値に還元されます。たとえば、t = 2とすると、将来の値であるx(3)になります。したがって、システムは非因果的です。
b) $y(t) = x(t)+x(t+2)$
この場合、x(t)は純粋に現在価値に依存する関数です。x(t + 2)関数は、t = 3の場合、x(5)の値を与えるため、将来に依存することはすでに説明しました。したがって、それは非因果的です。
c) $y(t) = x(t-1)+x(t)$
このシステムでは、与えられた入力の現在と過去の値に依存します。置換する値が何であれ、将来の依存関係が表示されることはありません。明らかに、それは非因果的システムではありません。むしろそれは因果的システムです。
非因果的システムは、非因果的システムのほんの少し修正されたバージョンです。システムは、入力の将来の値のみに依存します。現在の値にも過去の値にも依存しません。
例
次のシステムが非因果的であるかどうかを調べます。
a) $y(t) = x(t)+x(t-1)$
システムには2つのサブ機能があります。1つのサブ関数x(t + 1)は入力の将来の値に依存しますが、別のサブ関数x(t)は現在のみに依存します。システムは将来価値に加えて現在価値にも依存しているため、このシステムは非因果的ではありません。
b) $y(t) = x(t+3)$
上記のシステムを分析すると、システムはシステムの将来の値のみに依存していることがわかります。つまり、t = 0とすると、将来の値であるx(3)に減少します。このシステムは、非因果的システムの完璧な例です。
線形システムは、重ね合わせの法則に従います。この法則は、システムの線形性を証明するための必要十分条件です。これとは別に、システムは2つのタイプの法則の組み合わせです-
- 加法性の法則
- 同質性の法則

均質性の法則と加法性の法則の両方が上の図に示されています。ただし、システムが線形であるかどうかを確認するための条件は他にもいくつかあります。
The conditions are −
- 入力がゼロの場合、出力はゼロである必要があります。
- システムに非線形演算子が存在してはなりません。
非線形演算子の例-
(a)三角演算子-Sin、Cos、Tan、Cot、Sec、Cosecなど。
(b)指数、対数、モジュラス、正方形、立方体など。
(c)sa(i / p)、Sinc(i / p)、Sqn(i / p)など。
入力xまたは出力yのいずれにも、これらの非線形演算子を含めることはできません。
例
次のシステムが線形であるかどうかを調べてみましょう。
a) $y(t) = x(t)+3$
このシステムは、最初の条件に違反するため、線形システムではありません。入力をゼロにしてx(t)= 0とすると、出力はゼロではありません。
b) $y(t) = \sin tx(t)$
このシステムでは、入力をゼロとすると、出力はゼロになります。したがって、最初の条件は明らかに満たされます。繰り返しますが、x(t)に適用された非線形演算子はありません。したがって、2番目の条件も満たされます。したがって、システムは線形システムです。
c) $y(t) = \sin (x(t))$
上記のシステムでは、x(t)= 0とすると、出力もsin(0)= 0になるため、最初の条件が満たされます。ただし、非線形演算子が存在するため、2番目の条件は満たされません。 x(t)を操作します。したがって、システムは線形ではありません。
このシステムを定義したい場合、線形ではないシステムは非線形システムであると言えます。明らかに、この場合、線形システムで違反しているすべての条件が満たされる必要があります。
条件
適用される入力がゼロの場合、出力はゼロであってはなりません。
システムを非線形にするために、任意の非線形演算子を入力または出力のいずれかに適用できます。
例
与えられたシステムが線形か非線形かを調べるため。
a) $y(t) = e^{x(t)}$
上記のシステムでは、入力をゼロにすると出力が1になるため、最初の条件が満たされます。さらに、指数非線形演算子が入力に適用されます。明らかに、それは非線形システムの場合です。
b) $y(t) = x(t+1)+x(t-1)$
上記のタイプのシステムは、過去と将来の両方の値を処理します。ただし、入力をゼロにすると、その値は存在しません。したがって、入力がゼロの場合、入力のタイムスケーリングおよびタイムシフトバージョンもゼロになり、最初の条件に違反します。繰り返しますが、非線形演算子は存在しません。したがって、2番目の条件にも違反します。明らかに、このシステムは非線形システムではありません。むしろそれは線形システムです。
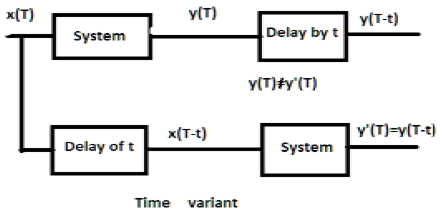
時不変システムの場合、出力と入力を時間単位だけ遅らせる必要があります。入力で提供された遅延は、時不変システムの出力に反映される必要があります。
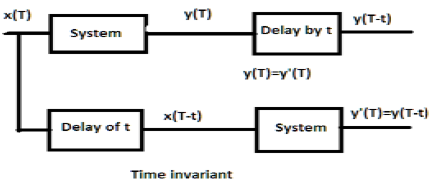
例
a) $y(T) = x(2T)$
上記の式の場合、最初にシステムを通過し、次に時間遅延を通過します(図の上部に示されているように)。その後、出力は次のようになります$x(2T-2t)$。ここで、同じ式が最初に時間遅延を通過し、次にシステムを通過します(図の下部に示されているように)。出力は次のようになります$x(2T-t)$。
したがって、このシステムは時不変システムではありません。
b) $y(T) = \sin [x(T)]$
信号が最初にシステムを通過し、次に時間遅延プロセスを通過する場合、出力は次のようになります。 $\sin x(T-t)$。同様に、システムが最初に時間遅延を通過し、次にシステムを通過すると、出力は次のようになります。$\sin x(T-t)$。両方の出力が同じであることがはっきりとわかります。したがって、システムは時不変です。
時変システムの場合も、出力と入力は時定数だけ遅延する必要がありますが、入力での遅延は出力に反映されるべきではありません。すべての時間スケーリングのケースは、時変システムの例です。同様に、システム関係の係数が時間の関数である場合、システムは時変です。
例
a) $y(t) = x[\cos T]$
上記の信号が最初にシステムを通過し、次に時間遅延を通過すると、出力は次のようになります。 $x\cos (T-t)$。最初に時間遅延を通過し、次にシステムを通過すると、次のようになります。$x(\cos T-t)$。出力が同じではないため、システムは時変です。
b) $y(T) = \cos T.x(T)$
上記の式が最初にシステムを通過し、次に時間遅延を通過する場合、出力は次のようになります。 $\cos(T-t)x(T-t)$。ただし、式が最初に時間遅延を通過し、次にシステムを通過する場合、出力は次のようになります。$\cos T.x(T-t)$。出力が同じではないため、明らかにシステムは時変です。
安定したシステムは、BIBO(制限付き出力の制限付き入力)条件を満たす。ここで、有界とは振幅が有限であることを意味します。安定したシステムの場合、出力は制限付きまたは有限である必要があり、有限または制限付き入力の場合は、すべての時点で必要です。
有界入力の例としては、正弦、余弦、DC、符号、および単位ステップの関数があります。
例
a) $y(t) = x(t)+10$
ここで、明確な有界入力の場合、明確な有界出力を取得できます。 $x(t) = 2, y(t) = 12$それは本質的に制限されています。したがって、システムは安定しています。
b) $y(t) = \sin [x(t)]$
与えられた式では、正弦関数には-1から+1の間にある値の明確な境界があることがわかります。したがって、x(t)で代入する値が何であれ、境界内の値を取得します。したがって、システムは安定しています。
不安定なシステムはBIBO条件を満たしていません。したがって、制限された入力の場合、システムが不安定な場合に制限された出力を期待することはできません。
例
a) $y(t) = tx(t)$
ここで、有限の入力の場合、有限の出力は期待できません。たとえば、$x(t) = 2 \Rightarrow y(t) = 2t$。tの値がわからないため、これは有限値ではありません。したがって、どこからでも範囲を指定できます。したがって、このシステムは安定していません。不安定なシステムです。
b) $y(t) = \frac{x(t)}{\sin t}$
正弦関数には-1から+1までの明確な範囲があることを前に説明しました。しかし、ここでは、分母に存在します。したがって、最悪のシナリオでは、t = 0とすると、正弦関数がゼロになると、システム全体が無限大になる傾向があります。したがって、このタイプのシステムはまったく安定していません。明らかに、これは不安定なシステムです。
Example 1 −かどうかを確認します $y(t) = x*(t)$ 線形または非線形です。
Solution−関数は入力の共役を表します。これは、最初の均質性の法則と加法性の法則、または2つの規則のいずれかによって検証できます。ただし、ルールによる検証ははるかに簡単なので、それを実行します。
システムへの入力がゼロの場合、出力もゼロになる傾向があります。したがって、最初の条件が満たされます。入力でも出力でも使用される非線形演算子はありません。したがって、システムは線形です。
Example 2 −かどうかを確認します $y(t)=\begin{cases}x(t+1), & t > 0\\x(t-1), & t\leq 0\end{cases}$ 線形または非線形
Solution−明らかに、時間がゼロ以下になると、入力がゼロになることがわかります。したがって、ゼロ入力では出力もゼロであり、最初の条件が満たされていると言えます。
この場合も、入力でも出力でも使用される非線形演算子はありません。したがって、システムは線形です。
Example 3 −かどうかを確認します $y(t) = \sin t.x(t)$ 安定しているかどうか。
Solution − x(t)の値を3とすると、ここでは正弦関数に乗算され、正弦関数の最大値と最小値が-1から+1の間で変化します。
したがって、関数全体の最大値と最小値も-3から+3の間で変化します。したがって、ここでは制限付き出力に対して制限付き入力を取得しているため、システムは安定しています。
離散時間フーリエ変換(DTFT)は、エネルギー信号と電力信号に使用されます。Z変換は、エネルギータイプの信号にも電力(NENP)タイプの信号にも、ある程度までは存在しません。交換$z=e^{jw}$ 絶対加算可能な信号の場合のみ、Z変換からDTFTへの変換に使用されます。
したがって、べき級数の離散時間信号x(n)のZ変換は、次のように記述できます。
$$X(z) = \sum_{n-\infty}^\infty x(n)Z^{-n}$$上記の式は、両側のZ変換式を表しています。
一般に、信号がZ変換される場合、次のように表すことができます。
$$X(Z) = Z[x(n)]$$または $x(n) \longleftrightarrow X(Z)$
連続時間信号の場合、ラプラス変換が使用されるため、Z変換は必要ありません。ただし、離散時間信号はZ変換によってのみ分析できます。
収束の領域
収束領域は、Z平面内の複素変数Zの範囲です。信号のZ変換は有限または収束です。したがって、ROCは、X(Z)が有限値を持つZの値のセットを表します。
ROCのプロパティ
- ROCにはポールは含まれていません。
- 右側の信号の場合、ROCはZ平面の円の外側になります。
- 左側の信号の場合、ROCはZ平面の円の内側になります。
- 安定性のために、ROCにはZ平面に単位円が含まれています。
- 両面信号の場合、ROCはZ平面のリングです。
- 有限持続時間の信号の場合、ROCはZ平面全体です。
Z変換は、次の特徴があります。
- X(Z)の式
- X(Z)のROC
シグナルとそのROC
| x(n) | X(Z) | ROC |
|---|---|---|
| $\delta(n)$ | $1$ | Z平面全体 |
| $U(n)$ | $1/(1-Z^{-1})$ | Mod(Z)> 1 |
| $a^nu(n)$ | $1/(1-aZ^{-1})$ | Mod(Z)> Mod(a) |
| $-a^nu(-n-1)$ | $1/(1-aZ^{-1})$ | Mod(Z)<Mod(a) |
| $na^nu(n)$ | $aZ^{-1}/(1-aZ^{-1})^2$ | Mod(Z)> Mod(a) |
| $-a^nu(-n-1)$ | $aZ^{-1}/(1-aZ^{-1})^2$ | Mod(Z)<Mod(a) |
| $U(n)\cos \omega n$ | $(Z^2-Z\cos \omega)/(Z^2-2Z \cos \omega +1)$ | Mod(Z)> 1 |
| $U(n)\sin \omega n$ | $(Z\sin \omega)/(Z^2-2Z \cos \omega +1)$ | Mod(Z)> 1 |
例
次のように与えられる信号のZ変換とROCを見つけましょう。 $x(n) = \lbrace 7,3,4,9,5\rbrace$、シリーズの原点は3です。
Solution −私たちが持っている式を適用する−
$X(z) = \sum_{n=-\infty}^\infty x(n)Z^{-n}$
$= \sum_{n=-1}^3 x(n)Z^{-n}$
$= x(-1)Z+x(0)+x(1)Z^{-1}+x(2)Z^{-2}+x(3)Z^{-3}$
$= 7Z+3+4Z^{-1}+9Z^{-2}+5Z^{-3}$
ROCは、Z = 0、∞、-∞を除くZ平面全体です。
この章では、Z変換の基本的な特性を理解します。
直線性
2つ以上の個別の離散信号に定数を掛けると、それぞれのZ変換にも同じ定数が掛けられると記載されています。
数学的には、
$$a_1x_1(n)+a_2x_2(n) = a_1X_1(z)+a_2X_2(z)$$Proof −私たちはそれを知っています、
$$X(Z) = \sum_{n=-\infty}^\infty x(n)Z^{-n}$$$= \sum_{n=-\infty}^\infty (a_1x_1(n)+a_2x_2(n))Z^{-n}$
$= a_1\sum_{n = -\infty}^\infty x_1(n)Z^{-n}+a_2\sum_{n = -\infty}^\infty x_2(n)Z^{-n}$
$= a_1X_1(z)+a_2X_2(z)$ (したがって証明済み)
ここで、ROCは $ROC_1\bigcap ROC_2$。
タイムシフト
タイムシフトプロパティは、離散信号の時間領域の変化がZ領域にどのように影響するかを示します。これは次のように記述できます。
$$x(n-n_0)\longleftrightarrow X(Z)Z^{-n}$$または $x(n-1)\longleftrightarrow Z^{-1}X(Z)$
Proof −
しましょう $y(P) = X(P-K)$
$Y(z) = \sum_{p = -\infty}^\infty y(p)Z^{-p}$
$= \sum_{p = -\infty}^\infty (x(p-k))Z^{-p}$
s = pkとします
$= \sum_{s = -\infty}^\infty x(s)Z^{-(s+k)}$
$= \sum_{s = -\infty}^\infty x(s)Z^{-s}Z^{-k}$
$= Z^{-k}[\sum_{s=-\infty}^\infty x(m)Z^{-s}]$
$= Z^{-k}X(Z)$ (したがって証明済み)
ここで、ROCはZ = 0(p> 0)またはZ =∞(p <0)と書くことができます。
例
U(n)とU(n-1)は次のようにプロットできます
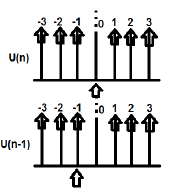
U(n)cabのZ変換は次のように記述されます。
$\sum_{n = -\infty}^\infty [U(n)]Z^{-n} = 1$
U(n-1)のZ変換は次のように書くことができます。
$\sum_{n = -\infty}^\infty [U(n-1)]Z^{-n} = Z^{-1}$
だからここに $x(n-n_0) = Z^{-n_0}X(Z)$ (したがって証明済み)
タイムスケーリング
Time Scalingプロパティは、時間を離散形式でスケーリングしたときに信号のZドメインがどうなるかを示します。これは次のように記述できます。
$$a^nx(n) \longleftrightarrow X(a^{-1}Z)$$Proof −
しましょう $y(p) = a^{p}x(p)$
$Y(P) = \sum_{p=-\infty}^\infty y(p)Z^{-p}$
$= \sum_{p=-\infty}^\infty a^px(p)Z^{-p}$
$= \sum_{p=-\infty}^\infty x(p)[a^{-1}Z]^{-p}$
$= X(a^{-1}Z)$(したがって証明された)
ROC:= Mod(ar1)<Mod(Z)<Mod(ar2)ここで、Mod = Modulus
例
のZ変換を決定しましょう $x(n) = a^n \cos \omega n$ 時間スケーリングプロパティを使用します。
Solution −
信号のZ変換はすでにわかっています $\cos (\omega n)$ −で与えられます
$$\sum_{n=-\infty}^\infty(\cos \omega n)Z^{-n} = (Z^2-Z \cos \omega)/(Z^2-2Z\cos \omega +1)$$
ここで、時間スケーリングプロパティを適用すると、のZ変換が $a^n \cos \omega n$ 次のように書くことができます。
$\sum_{n=-\infty}^\infty(a^n\cos \omega n)Z^{-n} = X(a^{-1}Z)$
$= [(a^{-1}Z)^2-(a^{-1}Z \cos \omega n)]/((a^{-1}Z)^2-2(a^{-1}Z \cos \omega n)+1)$
$= Z(Z-a \cos \omega)/(Z^2-2az \cos \omega+a^2)$
連続的な差別化
連続微分プロパティは、時間領域で離散信号を時間に関して微分すると、Z変換が行われることを示しています。これを以下に示します。
$$\frac{dx(n)}{dn} = (1-Z^{-1})X(Z)$$Proof −
方程式のLHSを考えてください- $\frac{dx(n)}{dn}$
$$= \frac{[x(n)-x(n-1)]}{[n-(n-1)]}$$$= x(n)-X(n-1)$
$= x(Z)-Z^{-1}x(Z)$
$= (1-Z^{-1})x(Z)$ (したがって証明済み)
ROC:R1 <Mod(Z)<R2
例
によって与えられる信号のZ変換を見つけましょう $x(n) = n^2u(n)$
プロパティによって私たちは書くことができます
$Zz[nU(n)] = -Z\frac{dZ[U(n)]}{dz}$
$= -Z\frac{d[\frac{Z}{Z-1}]}{dZ}$
$= Z/((Z-1)^2$
$= y(let)$
ここで、Z [ny]は、プロパティを再度適用することで見つけることができます。
$Z(n,y) = -Z\frac{dy}{dz}$
$= -Z\frac{d[Z/(Z-1)^3]}{dz}$
$= Z(Z+1)/(Z-1)^2$
畳み込み
これは、畳み込みが離散信号形式で発生したときのシステムのZドメインの変化を示しています。これは次のように記述できます。
$x_1(n)*x_2(n) \longleftrightarrow X_1(Z).X_2(Z)$
Proof −
$X(Z) = \sum_{n = -\infty}^\infty x(n)Z^{-n}$
$= \sum_{n=-\infty}^\infty[\sum_{k = -\infty}^\infty x_1(k)x_2(n-k)]Z^{-n}$
$= \sum_{k = -\infty}^\infty x_1(k)[\sum_n^\infty x_2(n-k)Z^{-n}]$
$= \sum_{k = -\infty}^\infty x_1(k)[\sum_{n = -\infty}^\infty x_2(n-k)Z^{-(n-k)}Z^{-k}]$
nk = lとすると、上記の式は次のように記述できます。
$X(Z) = \sum_{k = -\infty}^\infty x_1(k)[Z^{-k}\sum_{l=-\infty}^\infty x_2(l)Z^{-l}]$
$= \sum_{k = -\infty}^\infty x_1(k)X_2(Z)Z^{-k}$
$= X_2(Z)\sum_{k = -\infty}^\infty x_1(Z)Z^{-k}$
$= X_1(Z).X_2(Z)$ (したがって証明済み)
ROC:$ROC\bigcap ROC2$
例
2つの信号によって与えられる畳み込みを見つけましょう
$x_1(n) = \lbrace 3,-2,2\rbrace$ ...(式1)
$x_2(n) = \lbrace 2,0\leq 4\quad and\quad 0\quad elsewhere\rbrace$ ...(式2)
最初の方程式のZ変換は次のように書くことができます。
$\sum_{n = -\infty}^\infty x_1(n)Z^{-n}$
$= 3-2Z^{-1}+2Z^{-2}$
2番目の信号のZ変換は次のように書くことができます。
$\sum_{n = -\infty}^\infty x_2(n)Z^{-n}$
$= 2+2Z^{-1}+2Z^{-2}+2Z^{-3}+2Z^{-4}$
したがって、上記の2つの信号の畳み込みは次の式で与えられます。
$X(Z) = [x_1(Z)^*x_2(Z)]$
$= [3-2Z^{-1}+2Z^{-2}]\times [2+2Z^{-1}+2Z^{-2}+2Z^{-3}+2Z^{-4}]$
$= 6+2Z^{-1}+6Z^{-2}+6Z^{-3}+...\quad...\quad...$
得られた逆Z変換をとると、
$x(n) = \lbrace 6,2,6,6,6,0,4\rbrace$
初期値の定理
x(n)が因果シーケンスであり、そのZ変換がX(z)である場合、初期値の定理は次のように記述できます。
$X(n)(at\quad n = 0) = \lim_{z \to \infty} X(z)$
Proof −私たちはそれを知っています、
$X(Z) = \sum_{n = 0} ^\infty x(n)Z^{-n}$
上記のシリーズを拡張すると、次のようになります。
$= X(0)Z^0+X(1)Z^{-1}+X(2)Z^{-2}+...\quad...$
$= X(0)\times 1+X(1)Z^{-1}+X(2)Z^{-2}+...\quad...$
上記の場合、Z→∞の場合 $Z^{-n}\rightarrow 0$ (n> 0のため)
したがって、私たちは言うことができます。
$\lim_{z \to \infty}X(z) = X(0)$ (したがって証明済み)
最終値の定理
最終値定理は、信号のZ変換がX(Z)として表され、極がすべて円の内側にある場合、その最終値はx(n)またはX(∞)として表され、次のように記述できると述べています。 −
$X(\infty) = \lim_{n \to \infty}X(n) = \lim_{z \to 1}[X(Z)(1-Z^{-1})]$
Conditions −
- 因果システムにのみ適用されます。
- $X(Z)(1-Z^{-1})$ Z平面の単位円の内側に極が必要です。
Proof −私たちはそれを知っています
$Z^+[x(n+1)-x(n)] = \lim_{k \to \infty}\sum_{n=0}^kZ^{-n}[x(n+1)-x(n)]$
$\Rightarrow Z^+[x(n+1)]-Z^+[x(n)] = \lim_{k \to \infty}\sum_{n=0}^kZ^{-n}[x(n+1)-x(n)]$
$\Rightarrow Z[X(Z)^+-x(0)]-X(Z)^+ = \lim_{k \to \infty}\sum_{n = 0}^kZ^{-n}[x(n+1)-x(n)]$
ここでは、片側Z変換の高度なプロパティを適用できます。したがって、上記の式は次のように書き直すことができます。
$Z^+[x(n+1)] = Z[X(2)^+-x(0)Z^0] = Z[X(Z)^+-x(0)]$
ここで、上記の式にz = 1を入れると、上記の式を展開できます。
$\lim_{k \to \infty}{[x(1)-x(0)+x(6)-x(1)+x(3)-x(2)+...\quad...\quad...+x(x+1)-x(k)]}$
これは次のように定式化できます。
$X(\infty) = \lim_{n \to \infty}X(n) = \lim_{z \to 1}[X(Z)(1-Z^{-1})]$(したがって証明済み)
例
信号が次の式で与えられるx(n)の初期値と最終値を見つけましょう。
$X(Z) = 2+3Z^{-1}+4Z^{-2}$
Solution −まず、定理を適用して信号の初期値を求めます。
$x(0) = \lim_{z \to \infty}X(Z)$
$= \lim_{z \to \infty}[2+3Z^{-1}+4Z^{-2}]$
$= 2+(\frac{3}{\infty})+(\frac{4}{\infty}) = 2$
ここで、定理を適用した信号の最終値を見つけましょう。
$x(\infty) = \lim_{z \to \infty}[(1-Z^{-1})X(Z)]$
$= \lim_{z \to \infty}[(1-Z^{-1})(2+3Z^{-1}+4Z^{-2})]$
$= \lim_{z \to \infty}[2+Z^{-1}+Z^{-2}-4Z^{-3}]$
$= 2+1+1-4 = 0$
Some other properties of Z-transform are listed below −
周波数の分化
離散信号が時間に関して微分されると、信号のZドメインに変化が生じます。
$nx(n)\longleftrightarrow -Z\frac{dX(z)}{dz}$
そのROCは次のように書くことができます。
$r_2< Mod(Z)< r_1$
例
周波数の微分によってx(n)の値を見つけましょう。その離散信号は、Zドメインで次の式で与えられます。 $x(n)\longleftrightarrow X(Z) = log(1+aZ^{-1})$
プロパティによって、私たちはそれを書くことができます
$nx(n)\longleftrightarrow -Z\frac{dx(Z)}{dz}$
$= -Z[\frac{-aZ^{-2}}{1+aZ^{-1}}]$
$= (aZ^{-1})/(1+aZ^{-1})$
$= 1-1/(1+aZ^{-1})$
$nx(n) = \delta(n)-(-a)^nu(n)$
$\Rightarrow x(n) = 1/n[\delta(n)-(-a)^nu(n)]$
時間の掛け算
離散信号レベルで乗算が行われると、信号のZドメインが変化します。
$x_1(n).x_2(n)\longleftrightarrow(\frac{1}{2\Pi j})[X1(Z)*X2(Z)]$
時間内の接合
これは、Zドメインでの共役離散信号の表現を示しています。
$X^*(n)\longleftrightarrow X^*(Z^*)$
システム機能を備えたシステムは、すべての極が単位円の内側にある場合にのみ安定することができます。まず、システムが因果関係にあるかどうかを確認します。システムが因果的である場合、BIBO安定性の決定に進みます。ここで、BIBO安定性とは、制限付き出力条件の制限付き入力を指します。
これは次のように書くことができます。
$Mod(X(Z))< \infty$
$= Mod(\sum x(n)Z^{-n})< \infty$
$= \sum Mod(x(n)Z^{-n})< \infty$
$= \sum Mod[x(n)(re^{jw})^{-n}]< 0$
$= \sum Mod[x(n)r^{-n}]Mod[e^{-jwn}]< \infty$
$= \sum_{n = -\infty}^\infty Mod[x(n)r^{-n}]< \infty$
上記の式は、Z変換が存在するための条件を示しています。
ただし、DTFT信号が存在するための条件は
$$\sum_{n = -\infty}^\infty Mod(x(n)< \infty$$例1
信号のZ変換を調べてみましょう。これは次のように与えられます。
$x(n) = -(-0.5)^{-n}u(-n)+3^nu(n)$
$= -(-2)^nu(n)+3^nu(n)$
Solution −ここでは、 $-(-2)^nu(n)$ ROCは左側で、Z <2です。
にとって $3^nu(n)$ ROCは右側で、Z> 3です。
したがって、ここでは、共通領域がないため、信号のZ変換は存在しません。
例2
によって与えられる信号のZ変換を見つけてみましょう
$x(n) = -2^nu(-n-1)+(0.5)^nu(n)$
Solution −ここでは、 $-2^nu(-n-1)$ 信号のROCは左側で、Z <2です。
信号用 $(0.5)^nu(n)$ ROCは右側で、Z> 0.5
したがって、一般的なROCは0.5 <Z <2として形成されます
したがって、Z変換は次のように記述できます。
$X(Z) = \lbrace\frac{1}{1-2Z^{-1}}\rbrace+\lbrace\frac{1}{(1-0.5Z)^{-1}}\rbrace$
例3
信号のZ変換を調べてみましょう。これは次のように与えられます。 $x(n) = 2^{r(n)}$
Solution− r(n)はランプ信号です。したがって、信号は次のように書くことができます。
$x(n) = 2^{nu(n)}\lbrace 1, n<0 (u(n)=0)\quad and\quad2^n, n\geq 0(u(n) = 1)\rbrace$
$= u(-n-1)+2^nu(n)$
ここで、信号について $u(-n-1)$ およびROCZ <1および $2^nu(n)$ ROCの場合はZ> 2です。
したがって、信号のZ変換は存在しません。
因果システムのZ変換
因果関係は次のように定義できます。 $h(n) = 0,n<0$。因果的システムの場合、ROCはZ平面の円の外側になります。
$H(Z) = \displaystyle\sum\limits_{n = 0}^{\infty}h(n)Z^{-n}$
上記の式を拡張すると、
$H(Z) = h(0)+h(1)Z^{-1}+h(2)Z^{-2}+...\quad...\quad...$
$= N(Z)/D(Z)$
因果システムの場合、伝達関数の展開にはZの正の累乗は含まれません。因果システムの場合、分子の次数は分母の次数を超えることはできません。これは次のように書くことができます-
$\lim_{z \rightarrow \infty}H(Z) = h(0) = 0\quad or\quad Finite$
因果関係の安定性のために、伝達関数の極はZ平面の単位円の内側にある必要があります。
非因果的システムのためのZ変換
非因果的システムは次のように定義できます。 $h(n) = 0, n\geq 0$。非因果的システムの場合、伝達関数の極はZ平面の単位円の外側にある必要があります。非因果的システムの場合、ROCはZ平面の円の内側になります。
すでに周波数領域で表されているシステムを離散時間信号として分析する場合は、逆Z変換を使用します。
数学的には、次のように表すことができます。
$$x(n) = Z^{-1}X(Z)$$ここで、x(n)は時間領域の信号であり、X(Z)は周波数領域の信号です。
上記の方程式を積分形式で表現したい場合は、次のように書くことができます。
$$x(n) = (\frac{1}{2\Pi j})\oint X(Z)Z^{-1}dz$$ここで、積分は閉じたパスC上にあります。このパスはx(z)のROC内にあり、原点が含まれています。
逆Z変換を見つける方法
離散形式で分析が必要な場合は、逆Z変換によって周波数領域信号を離散形式に変換し直します。次の4つの方法に従って、逆Z変換を決定します。
- 筆算法
- 部分分数展開法
- 残差または周回積分法
筆算法
この方法では、信号x(z)のZ変換は、以下に示すように多項式の比率として表すことができます。
$$x(z)=N(Z)/D(Z)$$さて、分子を分母で割ると、次のようなシリーズになります。
$$X(z) = x(0)+x(1)Z^{-1}+x(2)Z^{-2}+...\quad...\quad...$$上記のシーケンスは、与えられた信号の一連の逆Z変換(n≥0の場合)を表しており、上記のシステムは因果関係があります。
ただし、n <0の場合、級数は次のように書くことができます。
$$x(z) = x(-1)Z^1+x(-2)Z^2+x(-3)Z^3+...\quad...\quad...$$部分分数展開法
ここでも、信号は最初にN(z)/ D(z)形式で表されます。
有理分数の場合、次のように表されます。
$x(z) = b_0+b_1Z^{-1}+b_2Z^{-2}+...\quad...\quad...+b_mZ^{-m})/(a_0+a_1Z^{-1}+a_2Z^{-2}+...\quad...\quad...+a_nZ^{-N})$
m <nかつan≠0の場合、上記のものは不適切です。
比率が適切でない(つまり不適切である)場合は、それを適切な形式に変換して解決する必要があります。
残差または周回積分法
この方法では、の残差を合計することにより、逆Z変換x(n)を取得します。 $[x(z)Z^{n-1}]$すべての極で。数学的には、これは次のように表すことができます。
$$x(n) = \displaystyle\sum\limits_{all\quad poles\quad X(z)}residues\quad of[x(z)Z^{n-1}]$$ここで、次数mの任意の極の残差は $z = \beta$ です
$$Residues = \frac{1}{(m-1)!}\lim_{Z \rightarrow \beta}\lbrace \frac{d^{m-1}}{dZ^{m-1}}\lbrace (z-\beta)^mX(z)Z^{n-1}\rbrace$$例1
システムの応答を見つける $s(n+2)-3s(n+1)+2s(n) = \delta (n)$、すべての初期条件がゼロの場合。
Solution −上記の式の両側でZ変換を行うと、次のようになります。
$$S(z)Z^2-3S(z)Z^1+2S(z) = 1$$$\Rightarrow S(z)\lbrace Z^2-3Z+2\rbrace = 1$
$\Rightarrow S(z) = \frac{1}{\lbrace z^2-3z+2\rbrace}=\frac{1}{(z-2)(z-1)} = \frac{\alpha _1}{z-2}+\frac{\alpha _2}{z-1}$
$\Rightarrow S(z) = \frac{1}{z-2}-\frac{1}{z-1}$
上記の式の逆Z変換を行うと、次のようになります。
$S(n) = Z^{-1}[\frac{1}{Z-2}]-Z^{-1}[\frac{1}{Z-1}]$
$= 2^{n-1}-1^{n-1} = -1+2^{n-1}$
例2
差分方程式が以下のように記述されているシステムのシステム関数H(z)と単位サンプル応答h(n)を見つけます。
$y(n) = \frac{1}{2}y(n-1)+2x(n)$
ここで、y(n)とx(n)は、それぞれシステムの出力と入力です。
Solution −上記の差分方程式のZ変換を行うと、次のようになります。
$y(z) = \frac{1}{2}Z^{-1}Y(Z)+2X(z)$
$= Y(Z)[1-\frac{1}{2}Z^{-1}] = 2X(Z)$
$= H(Z) = \frac{Y(Z)}{X(Z)} = \frac{2}{[1-\frac{1}{2}Z^{-1}]}$
このシステムにはポールがあります $Z = \frac{1}{2}$ そして $Z = 0$ そして $H(Z) = \frac{2}{[1-\frac{1}{2}Z^{-1}]}$
したがって、上記の逆Z変換を行うと、次のようになります。
$h(n) = 2(\frac{1}{2})^nU(n)$
例3
次の場合にY(z)、n≥0を決定します-
$y(n)+\frac{1}{2}y(n-1)-\frac{1}{4}y(n-2) = 0\quad given\quad y(-1) = y(-2) = 1$
Solution −上記の式にZ変換を適用すると、次のようになります。
$Y(Z)+\frac{1}{2}[Z^{-1}Y(Z)+Y(-1)]-\frac{1}{4}[Z^{-2}Y(Z)+Z^{-1}Y(-1)+4(-2)] = 0$
$\Rightarrow Y(Z)+\frac{1}{2Z}Y(Z)+\frac{1}{2}-\frac{1}{4Z^2}Y(Z)-\frac{1}{4Z}-\frac{1}{4} = 0$
$\Rightarrow Y(Z)[1+\frac{1}{2Z}-\frac{1}{4Z^2}] =\frac{1}{4Z}-\frac{1}{2}$
$\Rightarrow Y(Z)[\frac{4Z^2+2Z-1}{4Z^2}] = \frac{1-2Z}{4Z}$
$\Rightarrow Y(Z) = \frac{Z(1-2Z)}{4Z^2+2Z-1}$
連続時間信号フーリエ変換と同様に、離散時間フーリエ変換を使用して、離散シーケンスを同等の周波数領域表現とLTI離散時間システムに表現し、さまざまな計算アルゴリズムを開発できます。
連続FTのX(jω)は、x(n)の連続関数です。ただし、DFTは、スペクトルX(ω)のサンプルを使用してx(n)を表すことを扱います。したがって、この数学的ツールは、便利な表現で計算上非常に重要です。このツールを使用して、周期的シーケンスと非周期的シーケンスの両方を処理できます。周期シーケンスは、周期を無限大に拡張してサンプリングする必要があります。
周波数領域サンプリング
はじめに、周波数領域のサンプリング、つまりX(ω)のサンプリングをどのように進めるかを知る必要があることは明らかです。したがって、サンプリングされたフーリエ変換とDFTの関係は、次のように確立されます。
同様に、周期シーケンスは、周期Nを無限大に拡張することにより、このツールに適合させることができます。
非周期列を、 $X(n) = \lim_{N \to \infty}x_N(n)$
そのフーリエ変換を定義し、
$X(\omega ) = \sum_{n=-\infty}^\infty x(n)e^{-jwn}X(K\delta \omega)$
ここで、X(ω)は、δωラジアン間隔ごとに定期的にサンプリングされます。
X(ω)は2πラジアンで周期的であるため、基本範囲のサンプルのみが必要です。サンプルは、0≤ω≤2πの周波数範囲で等距離間隔で採取されます。同等の間隔の間の間隔は$\delta \omega = \frac{2\pi }{N}k$ ラジアン。
今評価中、 $\omega = \frac{2\pi}{N}k$
$X(\frac{2\pi}{N}k) = \sum_{n = -\infty}^\infty x(n)e^{-j2\pi nk/N},$ ... eq(2)
ここで、k = 0,1、……N-1
上記を細分化し、合計の順序を入れ替えた後
$X(\frac{2\pi}{N}k) = \displaystyle\sum\limits_{n = 0}^{N-1}[\displaystyle\sum\limits_{l = -\infty}^\infty x(n-Nl)]e^{-j2\pi nk/N}$ ... eq(3)
$\sum_{l=-\infty}^\infty x(n-Nl) = x_p(n) = a\quad periodic\quad function\quad of\quad period\quad N\quad and\quad its\quad fourier\quad series\quad = \sum_{k = 0}^{N-1}C_ke^{j2\pi nk/N}$
ここで、n = 0,1、…..、N-1; 「p」-周期的なエンティティまたは関数を表します
フーリエ係数は、
$C_k = \frac{1}{N}\sum_{n = 0}^{N-1}x_p(n)e^{-j2\pi nk/N}$k = 0,1、…、N-1 ... eq(4)
式3と4を比較すると、次のようになります。
$NC_k = X(\frac{2\pi}{N}k)$k = 0,1、…、N-1 ... eq(5)
$NC_k = X(\frac{2\pi}{N}k) = X(e^{jw}) = \displaystyle\sum\limits_{n = -\infty}^\infty x_p(n)e^{-j2\pi nk/N}$... eq(6)
フーリエ級数展開から、
$x_p(n) = \frac{1}{N}\displaystyle\sum\limits_{k = 0}^{N-1}NC_ke^{j2\pi nk/N} = \frac{1}{N}\sum_{k = 0}^{N-1}X(\frac{2\pi}{N}k)e^{j2\pi nk/N}$... eq(7)
ここで、n = 0,1、…、N-1
ここでは、X(ω)から周期信号を取得しました。 $x(n)$ から抽出することができます $x_p(n)$ 時間領域にエイリアシングがない場合のみ。 $N\geq L$
N =の期間 $x_p(n)$ L =の期間 $x(n)$
$x(n) = \begin{cases}x_p(n), & 0\leq n\leq N-1\\0, & Otherwise\end{cases}$
マッピングはこの方法で実現されます。
DFTのプロパティ
直線性
信号の組み合わせのDFTは、個々の信号のDFTの合計に等しいと記載されています。私たちは、2つの信号Xみましょう1(N)とx 2(n)を、そのDFT Sであり、X 1(ω)及びX 2(ω)をそれぞれ。だから、もし
$x_1(n)\rightarrow X_1(\omega)$そして$x_2(n)\rightarrow X_2(\omega)$
次に $ax_1(n)+bx_2(n)\rightarrow aX_1(\omega)+bX_2(\omega)$
どこ a そして b 定数です。
対称
DFTの対称性は、DTFTの対称性を導出したのと同様の方法で導出できます。シーケンスx(n)のDFTはX(K)で表されることがわかっています。ここで、x(n)とX(K)が複素数値のシーケンスである場合、次のように表すことができます。
$x(n) = x_R(n)+jx_1(n),0\leq n\leq N-1$
そして $X(K) = X_R(K)+jX_1(K),0\leq K\leq N-1$
双対性
DFTがX(K)として与えられる信号x(n)を考えてみましょう。有限期間シーケンスをX(N)とします。次に、双対定理によれば、
もし、 $x(n)\longleftrightarrow X(K)$
次に、 $X(N)\longleftrightarrow Nx[((-k))_N]$
したがって、DFTがわかっている場合はこの定理を使用することで、有限期間のシーケンスを簡単に見つけることができます。
複素共役のプロパティ
信号x(n)があり、そのDFTはX(K)としても知られているとします。ここで、信号の複素共役がx *(n)として与えられる場合、以下に示す定理を使用することにより、多くの計算を行わなくてもDFTを簡単に見つけることができます。
もし、 $x(n)\longleftrightarrow X(K)$
次に、 $x*(n)\longleftrightarrow X*((K))_N = X*(N-K)$
角周波数シフト
シーケンスx(n)と複素指数シーケンスの乗算 $e^{j2\Pi kn/N}$周波数のL単位によるDFTの循環シフトに相当します。これは、循環タイムシフトプロパティのデュアルです。
もし、 $x(n)\longleftrightarrow X(K)$
次に、 $x(n)e^{j2\Pi Kn/N}\longleftrightarrow X((K-L))_N$
2つのシーケンスの乗算
そこに2つの信号Xである場合に1(N)とx 2(n)と、それぞれのDFTはXである1(k)及びX 2(K)、時系列の対応の信号のその後乗算それらのDFTの巡回畳み込みです。
もし、 $x_1(n)\longleftrightarrow X_1(K)\quad\&\quad x_2(n)\longleftrightarrow X_2(K)$
次に、 $x_1(n)\times x_2(n)\longleftrightarrow X_1(K)© X_2(K)$
パーセバルの定理
複雑な値のシーケンスx(n)およびy(n)の場合、一般に
もし、 $x(n)\longleftrightarrow X(K)\quad \&\quad y(n)\longleftrightarrow Y(K)$
次に、 $\sum_{n = 0}^{N-1}x(n)y^*(n) = \frac{1}{N}\sum_{k = 0}^{N-1}X(K)Y^*(K)$
私たちはいつ $\omega = 2\pi K/N$ そして $N\rightarrow \infty,\omega$ 連続変数になり、制限の合計はになります $-\infty$ に $+\infty$。
したがって、
$$NC_k = X(\frac{2\pi}{N}k) = X(e^{j\omega}) = \displaystyle\sum\limits_{n = -\infty}^\infty x(n)e^{\frac{-j2\pi nk}{N}} = \displaystyle\sum\limits_{n = -\infty}^\infty x(n)e^{-j\omega n}$$離散時間フーリエ変換(DTFT)
私達はことを知っています、 $X(e^{j\omega}) = \sum_{n = -\infty}^\infty x(n)e^{-j\omega n}$
どこ、 $X(e^{j\omega})$は連続的で周期的であり、周期は2πです。…eq(1)
さて、
$x_p(n) = \sum_{k = 0}^{N-1}NC_ke^{j2 \pi nk/N}$ …フーリエ級数から
$x_p(n) = \frac{1}{2\pi}\sum_{k=0}^{N-1}NC_ke^{j2\pi nk/N}\times \frac{2\pi}{N}$
ωは連続になり、 $\frac{2\pi}{N}\rightarrow d\omega$、上記の理由によります。
$x(n) = \frac{1}{2\pi}\int_{n = 0}^{2\pi}X(e^{j\omega})e^{j\omega n}d\omega$…eq(2)
逆離散時間フーリエ変換
象徴的に、
$x(n)\Longleftrightarrow x(e^{j\omega})$(フーリエ変換ペア)
非周期的シーケンスx(n)の離散時間フーリエ変換が存在するための必要十分条件は絶対合計可能です。
すなわち$\sum_{n = -\infty}^\infty|x(n)|<\infty$
DTFTのプロパティ
Linearity : $a_1x_1(n)+a_2x_2(n)\Leftrightarrow a_1X_1(e^{j\omega})+a_2X_2(e^{j\omega})$
Time shifting − $x(n-k)\Leftrightarrow e^{-j\omega k}.X(e^{j\omega})$
Time Reversal − $x(-n)\Leftrightarrow X(e^{-j\omega})$
Frequency shifting − $e^{j\omega _0n}x(n)\Leftrightarrow X(e^{j(\omega -\omega _0)})$
Differentiation frequency domain − $nx(n) = j\frac{d}{d\omega}X(e^{j\omega})$
Convolution − $x_1(n)*x_2(n)\Leftrightarrow X_1(e^{j\omega})\times X_2(e^{j\omega})$
Multiplication − $x_1(n)\times x_2(n)\Leftrightarrow X_1(e^{j\omega})*X_2(e^{j\omega})$
Co-relation − $y_{x_1\times x_2}(l)\Leftrightarrow X_1(e^{j\omega})\times X_2(e^{j\omega})$
Modulation theorem − $x(n)\cos \omega _0n = \frac{1}{2}[X_1(e^{j(\omega +\omega _0})*X_2(e^{jw})$
Symmetry −$x^*(n)\Leftrightarrow X^*(e^{-j\omega})$ ;
$x^*(-n)\Leftrightarrow X^*(e^{j\omega})$ ;
$Real[x(n)]\Leftrightarrow X_{even}(e^{j\omega})$ ;
$Imag[x(n)]\Leftrightarrow X_{odd}(e^{j\omega})$ ;
$x_{even}(n)\Leftrightarrow Real[x(e^{j\omega})]$ ;
$x_{odd}(n)\Leftrightarrow Imag[x(e^{j\omega})]$ ;
Parseval’s theorem − $\sum_{-\infty}^\infty|x_1(n)|^2 = \frac{1}{2\pi}\int_{-\pi}^{\pi}|X_1(e^{j\omega})|^2d\omega$
以前、周波数領域でのサンプリングを研究しました。その基本的な知識で、私たちはサンプリングします$X(e^{j\omega})$周波数領域で、そのサンプリングされたデータから便利なデジタル分析を行うことができます。したがって、DFTは時間領域と周波数領域の両方でサンプリングされます。仮定で$x(n) = x_p(n)$
したがって、DFTは次の式で与えられます。
$X(k) = DFT[x(n)] = X(\frac{2\pi}{N}k) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)e^{-\frac{j2\pi nk}{N}}$、k = 0,1、…。、N-1 …eq(3)
そしてIDFTは-によって与えられます
$X(n) = IDFT[X(k)] = \frac{1}{N}\sum_{k = 0}^{N-1}X(k)e^{\frac{j2\pi nk}{N}}$、n = 0,1、…。、N-1 …eq(4)
$\therefore x(n)\Leftrightarrow X(k)$
ツイドルファクター
それはとして示されます $W_N$ として定義されます $W_N = e^{-j2\pi /N}$。その大きさは常に1に維持されます。のフェーズ$W_N = -2\pi /N$。これは単位円上のベクトルであり、計算の便宜のために使用されます。数学的には、次のように表すことができます。
$W_N^r = W_N^{r\pm N} = W_N^{r\pm 2N} = ...$
これはrと周期Nの関数です。
N = 8、r = 0,1,2,3、….14,15,16、…を考えてみましょう。
$\Longleftrightarrow W_8^0 = W_8^8 = W_8^{16} = ... = ... = W_8^{32} = ... =1= 1\angle 0$
$W_8^1 = W_8^9 = W_8^{17} = ... = ... = W_8^{33} = ... =\frac{1}{\sqrt 2}= j\frac{1}{\sqrt 2} = 1\angle-\frac{\pi}{4}$
線形変換
線形変換を理解しましょう-
私達はことを知っています、
$DFT(k) = DFT[x(n)] = X(\frac{2\pi}{N}k) = \sum_{n = 0}^{N-1}x(n).W_n^{-nk};\quad k = 0,1,….,N−1$
$x(n) = IDFT[X(k)] = \frac{1}{N}\sum_{k = 0}^{N-1}X(k).W_N^{-nk};\quad n = 0,1,….,N−1$
Note− DFTの計算は、N 2複素数乗算とN(N-1)複素数加算で実行できます。
$x_N = \begin{bmatrix}x(0)\\x(1)\\.\\.\\x(N-1) \end{bmatrix}\quad N\quad point\quad vector\quad of\quad signal\quad x_N$
$X_N = \begin{bmatrix}X(0)\\X(1)\\.\\.\\X(N-1) \end{bmatrix}\quad N\quad point\quad vector\quad of\quad signal\quad X_N$
$\begin{bmatrix}1 & 1 & 1 & ... & ... & 1\\1 & W_N & W_N^2 & ... & ... & W_N^{N-1}\\. & W_N^2 & W_N^4 & ... & ... & W_N^{2(N-1)}\\.\\1 & W_N^{N-1} & W_N^{2(N-1)} & ... & ... & W_N^{(N-1)(N-1)} \end{bmatrix}$
N-行列項の点DFTは次の式で与えられます- $X_N = W_Nx_N$
$W_N\longmapsto$ 線形変換の行列
$Now,\quad x_N = W_N^{-1}X_N$
マトリックス形式のIDFTは、
$$x_N = \frac{1}{N}W_N^*X_N$$の両方の表現を比較する $x_N,\quad W_N^{-1} = \frac{1}{N}W_N^*$ そして $W_N\times W_N^* = N[I]_{N\times N}$
したがって、 $W_N$ は線形変換行列、直交(ユニタリ)行列です。
の周期表から $W_N$ そして、その対称性から、次のように結論付けることができます。 $W_N^{k+N/2} = -W_N^k$
円対称
長さN≤Lの有限期間x(n)のN点DFTは、x(n)の周期的拡張のN点DFTと同等です。 $x_p(n)$ 期間Nの $x_p(n) = \sum_{l = -\infty}^\infty x(n-Nl)$。ここで、周期列であるシーケンスをk単位右にシフトすると、別の周期列が得られます。これは循環シフトとして知られており、これは次の式で与えられます。
$$x_p^\prime (n) = x_p(n-k) = \sum_{l = -\infty}^\infty x(n-k-Nl)$$新しい有限シーケンスは次のように表すことができます。
$$x_p^\prime (n) = \begin{cases}x_p^\prime(n), & 0\leq n\leq N-1\\0 & Otherwise\end{cases}$$Example − x(n)= {1,2,4,3}、N = 4、
$x_p^\prime (n) = x(n-k,modulo\quad N)\equiv x((n-k))_N\quad;ex-if\quad k=2i.e\quad 2\quad unit\quad right\quad shift\quad and\quad N = 4,$
時計回りを正の方向と仮定します。
わかった、 $x\prime(n) = x((n-2))_4$
$x\prime(0) = x((-2))_4 = x(2) = 4$
$x\prime(1) = x((-1))_4 = x(3) = 3$
$x\prime(2) = x((-2))_4 = x(0) = 1$
$x\prime(3) = x((1))_4 = x(1) = 2$
Conclusion − Nポイントシーケンスの循環シフトは、その周期的拡張の線形シフトと同等であり、その逆も同様です。
循環的に偶数のシーケンス- $x(N-n) = x(n),\quad 1\leq n\leq N-1$
$i.e.x_p(n) = x_p(-n) = x_p(N-n)$
活用する−$x_p(n) = x_p^*(N-n)$
循環的に奇数のシーケンス- $x(N-n) = -x(n),\quad 1\leq n\leq N-1$
$i.e.x_p(n) = -x_p(-n) = -x_p(N-n)$
共役奇数- $x_p(n) = -x_p^*(N-n)$
さて、 $x_p(n) = x_{pe}+x_{po}(n)$、 どこ、
$x_{pe}(n) = \frac{1}{2}[x_p(n)+x_p^*(N-n)]$
$x_{po}(n) = \frac{1}{2}[x_p(n)-x_p^*(N-n)]$
実信号x(n)の場合、$X(k) = X^*(N-k)$
$X_R(k) = X_R(N-k)$
$X_l(k) = -X_l(N-k)$
$\angle X(k) = -\angle X(N-K)$
Time reversal−0番目のサンプルについてサンプルを反転します。これは次のように与えられます。
$x((-n))_N = x(N-n),\quad 0\leq n\leq N-1$
時間反転は、シーケンスのサンプルを時計回りの方向、つまり負の方向と見なしてプロットします。
その他の重要なプロパティ
その他の重要なIDFTプロパティ $x(n)\longleftrightarrow X(k)$
Time reversal − $x((-n))_N = x(N-n)\longleftrightarrow X((-k))_N = X(N-k)$
Circular time shift − $x((n-l))_N \longleftrightarrow X(k)e^{j2\pi lk/N}$
Circular frequency shift − $x(n)e^{j2\pi ln/N} \longleftrightarrow X((k-l))_N$
Complex conjugate properties −
$x^*(n)\longleftrightarrow X^*((-k))_N = X^*(N-k)\quad and$
$x^*((-n))_N = x^*(N-n)\longleftrightarrow X^*(-k)$
Multiplication of two sequence −
$x_1(n)\longleftrightarrow X_1(k)\quad and\quad x_2(n)\longleftrightarrow X_2(k)$
$\therefore x_1(n)x_2(n)\longleftrightarrow X_1(k)\quadⓃ X_2(k)$
Circular convolution −および2つのDFTの乗算
$x_1(k)\quad Ⓝ x_2(k) =\sum_{k = 0}^{N-1}x_1(n).x_2((m-n))_n,\quad m = 0,1,2,... .,N-1 $
$x_1(k)\quad Ⓝ x_2(k)\longleftrightarrow X_1(k).X_2(k)$
Circular correlation −もし $x(n)\longleftrightarrow X(k)$ そして $y(n)\longleftrightarrow Y(k)$ 、次に、として示される相互相関シーケンスが存在します。 $\bar Y_{xy}$ そのような $\bar Y_{xy}(l) = \sum_{n = 0}^{N-1}x(n)y^*((n-l))_N = X(k).Y^*(k)$
Parseval’s Theorem −もし $x(n)\longleftrightarrow X(k)$ そして $y(n)\longleftrightarrow Y(k)$;
$\displaystyle\sum\limits_{n = 0}^{N-1}x(n)y^*(n) = \frac{1}{N}\displaystyle\sum\limits_{n =0}^{N-1}X(k).Y^*(k)$
私たちは2つの有限持続配列は、Xみましょう1(n)およびX 2それらのDFTがXであるNと整数の長さを有する、(N)を1(K)およびX 2(K)は、それぞれ、下に示されています-
$$X_1(K) = \sum_{n = 0}^{N-1}x_1(n)e^{\frac{j2\Pi kn}{N}}\quad k = 0,1,2...N-1$$ $$X_2(K) = \sum_{n = 0}^{N-1}x_2(n)e^{\frac{j2\Pi kn}{N}}\quad k = 0,1,2...N-1$$ここで、X 3(K)として与えられる別のシーケンスx 3(n)のDFTを見つけようとします。
$X_3(K) = X_1(K)\times X_2(K)$
上記のIDFTを取ることにより、
$x_3(n) = \frac{1}{N}\displaystyle\sum\limits_{n = 0}^{N-1}X_3(K)e^{\frac{j2\Pi kn}{N}}$
上記の方程式を解いた後、最終的に、次のようになります。
$x_3(n) = \displaystyle\sum\limits_{m = 0}^{N-1}x_1(m)x_2[((n-m))_N]\quad m = 0,1,2...N-1$
| 比較ポイント | 線形畳み込み | 巡回畳み込み |
|---|---|---|
| シフト | 線形シフト | 循環シフト |
| 畳み込み結果のサンプル | $N_1+N_2−1$ | $Max(N_1,N_2)$ |
| フィルタの応答を見つける | 可能 | ゼロパディングで可能 |
巡回畳み込みの方法
一般に、巡回畳み込みを実行するために採用される2つの方法があり、それらは次のとおりです。
- 同心円法、
- 行列乗算法。
同心円法
しましょう $x_1(n)$ そして $x_2(n)$2つの与えられたシーケンスである。の巡回畳み込みの手順$x_1(n)$ そして $x_2(n)$ です
2つの同心円を取ります。のN個のサンプルをプロットします$x_1(n)$ 反時計回りの方向の外側の円の円周上(等距離の連続する点を維持)。
プロット用 $x_2(n)$、のN個のサンプルをプロットします $x_2(n)$内側の円を時計回りに、開始サンプルを0番目のサンプルと同じポイントに配置します。$x_1(n)$
2つの円の対応するサンプルを乗算し、それらを追加して出力を取得します。
一度に1つのサンプルを使用して、内側の円を反時計回りに回転させます。
行列乗算法
行列法は、2つの与えられたシーケンスを表します $x_1(n)$ そして $x_2(n)$ マトリックス形式で。
与えられたシーケンスの1つは、一度に1つのサンプルの循環シフトを介して繰り返され、NXNマトリックスを形成します。
他のシーケンスは列行列として表されます。
2つの行列を乗算すると、巡回畳み込みの結果が得られます。
DFTは、時間領域の畳み込みに対する代替アプローチを提供します。周波数領域で線形フィルタリングを実行するために使用できます。
したがって、$Y(\omega) = X(\omega).H(\omega)\longleftrightarrow y(n)$。
この周波数領域アプローチの問題は、 $Y(\omega)$、 $X(\omega)$ そして $H(\omega)$はωの連続関数であり、コンピューターでのデジタル計算には役立ちません。ただし、DFTは、目的を解決するためにこれらの波形のサンプルバージョンを提供します。
利点は、FFTのようなより高速なDFT技術の知識を持っているため、時間領域アプローチと比較して、デジタルコンピューター計算用に計算上効率の高いアルゴリズムを開発できることです。
有限期間のシーケンスを考えてみましょう。 $[x(n) = 0,\quad for,n<0\quad and\quad n\geq L]$ (一般化された方程式)、インパルス応答で線形フィルターを励起します $[h(n) = 0,\quad forn<0\quad and\quad n\geq M]$。
$$x(n)y(n)$$ $$output = y(n) = \sum_{k = 0}^{M-1}h(k).x(n-k)$$畳み込み分析から、y(n)の持続時間はL + M-1であることが明らかです。
周波数領域では、
$$Y(\omega) = X(\omega).H(\omega)$$さて、 $Y(\omega)$ はωの連続関数であり、離散周波数のセットでサンプリングされ、個別のサンプルの数はこれ以上である必要があります。 $L+M-1$。
$$DFT\quad size = N\geq L+M-1$$と $\omega = \frac{2\pi}{N}k$、
$Y(\omega) = X(k).H(k)$、ここで、k = 0,1、…。、N-1
ここで、X(k)とH(k)は、それぞれx(n)とh(n)のN点DFTです。 $x(n)\& h(n)$ 長さNまでゼロが埋め込まれます。連続スペクトルが歪むことはありません。 $X(\omega)$ そして $H(\omega)$。以来$N\geq L+M-1$、出力シーケンスy(n)のN点DFTは、周波数領域でy(n)を表すのに十分であり、これらの事実は、X(k)とH(k)のN点DFTの乗算とそれに続く計算を推測します。 N点のIDFTはy(n)を生成する必要があります。
これは、ゼロパディングを使用したx(n)とH(n)のN点巡回畳み込みが、x(n)とh(n)の線形畳み込みに等しいことを意味します。
したがって、DFTは線形フィルタリングに使用できます。
Caution −nは常に以上である必要があります $L+M-1$。そうしないと、エイリアシング効果によって出力シーケンスが破損します。
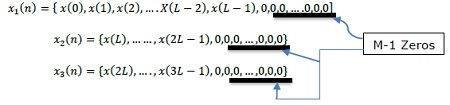
長い持続時間の入力シーケンスx(n)が、2つのシーケンスを畳み込むことによって有限持続時間のインパルス応答を持つシステムで処理されると仮定します。DFTを介して実行される線形フィルタリングには固定サイズのデータブロックに対する操作が含まれるため、入力シーケンスは処理前に異なる固定サイズのデータブロックに分割されます。
次に、連続するブロックが一度に1つずつ処理され、結果が組み合わされて最終結果が生成されます。
畳み込みは、長い入力シーケンスを異なる固定サイズのセクションに分割することによって実行されるため、セクション畳み込みと呼ばれます。長い入力シーケンスは、FIRフィルター処理の前に、固定サイズのブロックにセグメント化されます。
離散たたみ込みを評価するために2つの方法が使用されます-
Overlap-save method
Overlap-add method
オーバーラップ保存方法
オーバーラップ保存は、非常に長い信号x(n)と有限インパルス応答(FIR)フィルターh(n)の間の離散たたみ込みを評価する効率的な方法の伝統的な名前です。オーバーラップ保存方法の手順は次のとおりです。
入力データブロックの長さ= N = L + M-1とします。したがって、DFTおよびIDFTの長さ= Nです。各データブロックは、前のブロックのM-1データポイントとそれに続くL個の新しいデータポイントを伝送して、長さN = L + M-1のデータシーケンスを形成します。
まず、データブロックごとにN点DFTが計算されます。
(L-1)ゼロを追加することにより、FIRフィルターのインパルス応答の長さが増加し、NポイントのDFTが計算されて保存されます。
2つのN点のDFT H(k)とXとの乗算M(K):Y ' M(k)= H(K)・X M(k)は、ここで、K = 0,1,2、... N-1
その後、IDFT [Y ' M((K)= Y'((N)= [Y ' M(0)、Y' M(1)、Y ' M(2)、......、Y ' M(M-1)、Y' M(M)、...... Y ' M(N-1)]
(ここでは、N-1 = L + M-2)
最初のM-1ポイントはエイリアシングのために破損しているため、データレコードの長さがNであるため、それらは破棄されます。
最後のL点は畳み込みの結果とまったく同じなので、
Y ' M(N)= Y M(n)は、ここで、n = M、M + 1、...。N-1
エイリアシングを回避するために、各データレコードの最後のM-1要素が保存され、これらのポイントは後続のレコードに繰り越されて、最初のM-1要素になります。

エイリアシングを無効にするための最初のM-1ポイントが回避されるIDFTの結果と、残りのLポイントは、線形畳み込みの結果として望ましい結果を構成します。
オーバーラップ加算法
以下に、オーバーラップ法を使用して離散畳み込みを見つける手順を示します。
入力データのブロックサイズをLとします。したがって、DFTとIDFTのサイズは次のようになります。N= L + M-1
各データブロックには、最後にM-1個のゼロが追加されます。
N点DFTを計算します。
2つのN点DFTが乗算されます:Y m(k)= H(k).X m(k)、ここでk = 0、、1,2、…。、N-1
IDFT [Y m(k)]は、DFTのサイズがN = L + M-1であるため、エイリアシングの影響を受けない長さNのブロックを生成し、それぞれにM-1個のゼロを追加することでシーケンスの長さをNポイントに増やします。ブロック。
各ブロックの最後のM-1ポイントをオーバーラップさせて、後続のブロックの最初のM-1ポイントに追加する必要があります。
(理由:各データブロックはM-1個のゼロで終了します)
したがって、この方法はオーバーラップ加算法として知られています。したがって、次のようになります。
y(n)= {y 1(0)、y 1(1)、y 1(2)、... ..、y 1(L-1)、y 1(L)+ y 2(0)、 y 1(L + 1)+ y 2(1)、... ... ..、y 1(N-1)+ y 2(M-1)、y 2(M)、....。 。.........}}
DCT(離散コサイン変換)は、線形変換または複素指数の組み合わせとしてのN入力シーケンスx(n)、0≤n≤N-1です。その結果、x(n)が実数であっても、DFT係数は一般に複雑になります。
実数列x(n)を余弦列の線形結合として表現したN×N構造を持つ直交変換を見つけようとするとします。私たちはすでにそれを知っています-
$X(K) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)cos\frac{2\Pi kn}{N}0\leq k \leq N-1$
そして $x(n) = \frac{1}{N}\sum_{k = 0}^{N-1}x(k)cos\frac{2\Pi kn}{N}0\leq k \leq N-1$
これは、N点シーケンスx(n)が実数で偶数の場合に可能です。したがって、$x(n) = x(N-n),0\leq n \leq (N-1)$。結果として得られるDFT自体は現実的で均一です。これらのことから、シーケンスの「偶数拡張」の2NポイントDFTを取得することにより、任意のNポイント実シーケンスに対して離散コサイン変換をデバイス化できる可能性があることが明らかになります。
DCTは、基本的に、画像および音声処理で使用されます。また、画像や音声信号の圧縮にも使用されます。
$DFT[s(n)] = S(k) = \sum_{n = 0}^{2N-1}s(n)W_{2N}^{nk},\quad where\quad 0\leq k \leq 2N-1$
$S(k) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)W_{2N}^{nk}+\displaystyle\sum\limits_{n = N}^{2N-1}x(2N-n-1)W_{2N}^{nk};\quad where\quad 0\leq k\leq 2N-1$
$\Rightarrow S(k) = W_{2N}^{-k/2}+\sum_{n = 0}^{N-1}x(n) [W_{2N}^{nk}W_{2N}^{k/2}+W_{2N}^{-nk}W_{2N}^{-k/2}];\quad where\quad 0\leq k\leq 2N-1$
$\Rightarrow S(k) = W_{2N}^{\frac{k}{2}}\sum_{n = 0}^{N-1}x(n)\cos [\frac{\pi}{N}(n+\frac{1}{2})k];\quad where\quad 0\leq k\leq 2N-1$
DCTは、によって定義されます。
$V(k) = 2\sum_{n = 0}^{N-1}x(n)\cos [\frac{\pi}{2}(n+\frac{1}{2})k]\quad where\quad 0\leq k\leq N-1$
$\Rightarrow V(k) = W_{2N}^{\frac{k}{2}}S(k)\quad or\quad S(k) = W_{2N}^{\frac{k}{2}}V(k),\quad where\quad 0\leq k\leq N-1$
$\Rightarrow V(k) = 2R[W_{2N}^{\frac{k}{2}}\sum_{n = 0}^{N-1}x(n)W_{2N}^{nk}],\quad where\quad 0\leq k\leq N-1$
例1
シーケンスのパーセバルの定理を確認します $x(n) = \frac{1^n}{4}u(n)$
Solution − $\displaystyle\sum\limits_{-\infty}^\infty|x_1(n)|^2 = \frac{1}{2\pi}\int_{-\pi}^{\pi}|X_1(e^{j\omega})|^2d\omega$
LHS $\displaystyle\sum\limits_{-\infty}^\infty|x_1(n)|^2$
$= \displaystyle\sum\limits_{-\infty}^{\infty}x(n)x^*(n)$
$= \displaystyle\sum\limits_{-\infty}^\infty(\frac{1}{4})^{2n}u(n) = \frac{1}{1-\frac{1}{16}} = \frac{16}{15}$
RHS $X(e^{j\omega}) = \frac{1}{1-\frac{1}{4}e-j\omega} = \frac{1}{1-0.25\cos \omega+j0.25\sin \omega}$
$\Longleftrightarrow X^*(e^{j\omega}) = \frac{1}{1-0.25\cos \omega-j0.25\sin \omega}$
計算中、 $X(e^{j\omega}).X^*(e^{j\omega})$
$= \frac{1}{(1-0.25\cos \omega)^2+(0.25\sin \omega)^2} = \frac{1}{1.0625-0.5\cos \omega}$
$\frac{1}{2\pi}\int_{-\pi}^{\pi}\frac{1}{1.0625-0.5\cos \omega}d\omega$
$\frac{1}{2\pi}\int_{-\pi}^{\pi}\frac{1}{1.0625-0.5\cos \omega}d\omega = 16/15$
LHS = RHSであることがわかります。(したがって証明済み)
例2
のN点DFTを計算します $x(n) = 3\delta (n)$
Solution −私たちはそれを知っています、
$X(K) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)e^{\frac{j2\Pi kn}{N}}$
$= \displaystyle\sum\limits_{n = 0}^{N-1}3\delta(n)e^{\frac{j2\Pi kn}{N}}$
$ = 3\delta (0)\times e^0 = 1$
そう、$x(k) = 3,0\leq k\leq N-1$…Ans。
例3
のN点DFTを計算します $x(n) = 7(n-n_0)$
Solution −私たちはそれを知っています、
$X(K) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)e^{\frac{j2\Pi kn}{N}}$
x(n)の値を代入して、
$\displaystyle\sum\limits_{n = 0}^{N-1}7\delta (n-n_0)e^{-\frac{j2\Pi kn}{N}}$
$= e^{-kj14\Pi kn_0/N}$…Ans
以前のDFT法では、計算部分が長すぎることがわかりました。それを減らしたい。これは、FFTまたは高速フーリエ変換を介して実行できます。したがって、FFTは、計算部分が削減されるアルゴリズム形式の離散フーリエ変換の計算に他なりません。
FFTを使用する主な利点は、FFTを使用してFIRフィルターを設計できることです。数学的には、FFTは次のように書くことができます。
$$x[K] = \displaystyle\sum\limits_{n = 0}^{N-1}x[n]W_N^{nk}$$それをよりよく理解するために例を見てみましょう。から名付けられた8つのポイントを検討しました$x_0\quad to\quad x_7$。一方のグループでは偶数の用語を選択し、もう一方のグループでは奇数の用語を選択します。上記の概略図を以下に示します-
ここで、ポイントは、x 0とx 2とx 4及びX 6が一つのカテゴリーに分類されていると同様に、点は、X 1、X、3、xは5及びX 7は、別のカテゴリに置かれています。これで、さらに2つのグループにまとめて、計算を進めることができます。ここで、これらをさらに2つに分割することが、計算にどのように役立つかを見てみましょう。
$x[k] = \displaystyle\sum\limits_{r = 0}^{\frac{N}{2}-1}x[2r]W_N^{2rk}+\displaystyle\sum\limits_{r = 0}^{\frac{N}{2}-1}x[2r+1]W_N^{(2r+1)k}$
$= \sum_{r = 0}^{\frac{N}{2}-1}x[2r]W_{N/2}^{rk}+\sum_{r = 0}^{\frac{N}{2}-1}x[2r+1]W_{N/2}^{rk}\times W_N^k$
$= G[k]+H[k]\times W_N^k$
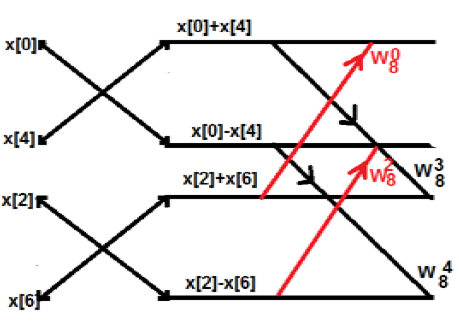
最初は8ポイントのシーケンスを取りましたが、後でそれをG [k]とH [k]の2つの部分に分割しました。G [k]は偶数部分を表し、H [k]は奇数部分を表します。ダイアグラムで実現したい場合は、以下のように表示できます。
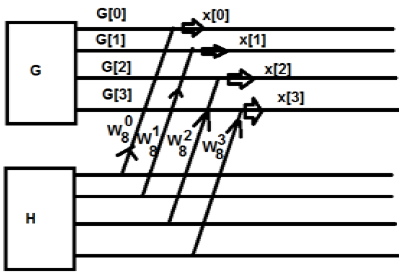
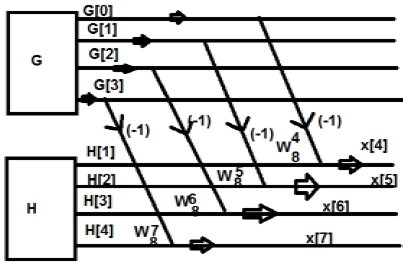
上の図から、
$W_8^4 = -1$
$W_8^5 = -W_8^1$
$W_8^6 = -W_8^2$
$W_8^7 = -W_8^3$
同様に、最終的な値は次のように書くことができます-
$G[0]-H[0] = x[4]$
$G[1]-W_8^1H[1] = x[5]$
$G[2]-W_8^2H[2] = x[6]$
$G[1]-W_8^3H[3] = x[7]$
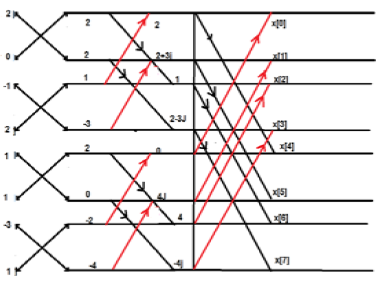
上記は周期系列です。このシステムの欠点は、Kが4ポイントを超えて破ることができないことです。ここで、上記をさらに詳しく見ていきましょう。このような構造になります
例
シーケンスx [n] = {1,1、-1、-3,0,1,2,1}について考えてみます。FFTを計算します。
Solution −指定されたシーケンスはx [n] = {2,1、-1、-3,0,1,2,1}です。
以下に示すように用語を配置します。
このメモリの効率的な使用は、FFTを計算するための高速ハードウェアを設計するために重要です。インプレース計算という用語は、このメモリ使用量を説明するために使用されます。
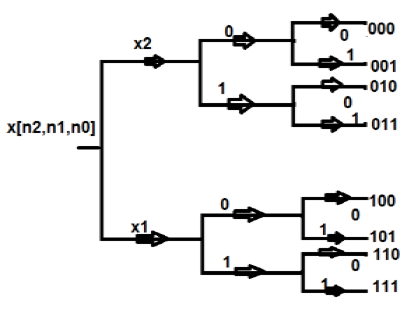
時系列でのデシメーション
この構造では、すべてのポイントをバイナリ形式、つまり0と1で表します。次に、これらの構造を逆にします。その後に取得するシーケンスは、ビット反転シーケンスと呼ばれます。これは、時系列でのデシメーションとも呼ばれます。8点DFTのインプレース計算は、以下に示すように表形式で示されています。
| ポイント | バイナリ形式 | リバーサル | 同等のポイント |
|---|---|---|---|
| 0 | 000 | 000 | 0 |
| 1 | 001 | 100 | 4 |
| 2 | 010 | 010 | 2 |
| 3 | 011 | 110 | 6 |
| 4 | 100 | 001 | 1 |
| 5 | 101 | 101 | 5 |
| 6 | 110 | 011 | 3 |
| 7 | 111 | 111 | 7 |
周波数シーケンスでのデシメーション
時系列とは別に、N点シーケンスも頻度で表すことができます。それをよりよく理解するために、4ポイントのシーケンスを取りましょう。
シーケンスを $x[0], x[1], x[2], x[3], x[4], x[5], x[6], x[7]$。最初に、2つのポイントを1つのグループにグループ化します。数学的には、このシーケンスは次のように書くことができます。
$$x[k] = \sum_{n = 0}^{N-1}x[n]W_N^{n-k}$$ここで、シーケンス番号0〜3の1つのグループと、シーケンス4〜7の別のグループを作成します。これで、数学的にこれを次のように表すことができます。
$$\displaystyle\sum\limits_{n = 0}^{\frac{N}{2}-1}x[n]W_N^{nk}+\displaystyle\sum\limits_{n = N/2}^{N-1}x[n]W_N^{nk}$$nをrに置き換えましょう。ここで、r = 0、1、2…。(N / 2-1)です。数学的には、
$$\displaystyle\sum\limits_{n = 0}^{\frac{N}{2}-1}x[r]W_{N/2}^{nr}$$最初に最初の4つの点(x [0]、x [1]、x [2]、x [3])を取り、次のように数学的に表現しようとします。
$\sum_{n = 0}^3x[n]W_8^{nk}+\sum_{n = 0}^3x[n+4]W_8^{(n+4)k}$
$= \lbrace \sum_{n = 0}^3x[n]+\sum_{n = 0}^3x[n+4]W_8^{(4)k}\rbrace \times W_8^{nk}$
今 $X[0] = \sum_{n = 0}^3(X[n]+X[n+4])$
$X[1] = \sum_{n = 0}^3(X[n]+X[n+4])W_8^{nk}$
$= [X[0]-X[4]+(X[1]-X[5])W_8^1+(X[2]-X[6])W_8^2+(X[3]-X[7])W_8^3$
さらに2つの部分に分割できます。つまり、4ポイントのシーケンスとして分割する代わりに、2ポイントのシーケンスに分割できます。
FIRフィルターは、フィルターのコンピューター支援設計を行うのに役立ちます。例を見て、それがどのように機能するかを見てみましょう。以下に、必要なフィルターの図を示します。

コンピューターの設計を行う際に、連続グラフの数値全体を離散値に分割します。特定の制限内で、離散的な大きさを持つ64、256、または512(など)の数のパーツに分割します。
上記の例では、-πから+πまでの制限を採用しています。256の部分に分けました。ポイントは、H(0)、H(1)、…。最大H(256)として表すことができます。ここでは、IDFTアルゴリズムを適用します。これにより、線形位相特性が得られます。
場合によっては、特定のフィルターの順序に関心があることがあります。上記の設計を9次フィルターで実現したいとします。したがって、フィルター値をh0、h1、h2….h9とします。数学的には、以下のように表示できます。
$$H(e^{j\omega}) = h_0+h_1e^{-j\omega}+h_2e^{-2j\omega}+.....+h_9e^{-9j\omega}$$転位が多い場合は最大点を取ります。
たとえば、上の図では、ポイントBとCの間で急激な傾きの低下が見られます。したがって、このポイントではより離散的な値を取得しようとしますが、ポイントCとDの間には一定の勾配があります。離散値の数が少なくなります。
上記のフィルターを設計するために、次のように最小化プロセスを実行します。
$H(e^{j\omega1}) = h_0+h_1e^{-j\omega1}+h_2e^{-2j\omega1}+.....+h_9e^{-9j\omega1}$
$H(e^{j\omega2}) = h_0+h_1e^{-j\omega2}+h_2e^{-2j\omega2}+.....+h_9e^{-9j\omega2}$
同様に、
$(e^{j\omega1000}) = h_0+h_1eH^{-j\omega1000}h_2e^{-2j\omega1000}+.....+h_9+e^{-9j\omega1000}$
上記の方程式を行列形式で表すと、次のようになります。
$$\begin{bmatrix}H(e^{j\omega_1})\\.\\.\\H(e^{j\omega_{1000}}) \end{bmatrix} = \begin{bmatrix}e^{-j\omega_1} & ... & e^{-j9\omega_1} \\. & & . \\. & & . \\e^{-j\omega_{1000}} &... & e^{j9\omega_{1000}} \end{bmatrix}\begin{bmatrix}h_0\\.\\.\\h_9\end{bmatrix}$$1000×1行列をB、1000×9行列をA、9×1行列をAとしましょう。 $\hat{h}$。
したがって、上記の行列を解くために、次のように記述します。
$\hat{h} = [A^TA]^{-1}A^{T}B$
$= [A^{*T}A]^{-1}A^{*T}B$
ここで、A *は行列Aの複素共役を表します。