制御システム-ボード線図
ボード線図またはボード線図は、2つのプロットで構成されます-
- マグニチュードプロット
- 位相プロット
両方のプロットで、x軸は角周波数(対数目盛)を表します。一方、yaxisは、振幅プロットの開ループ伝達関数の大きさ(線形スケール)と、位相プロットの開ループ伝達関数の位相角(線形スケール)を表します。
ザ・ magnitude dB単位の開ループ伝達関数のは-
$$ M = 20 \:\ log | G(j \ omega)H(j \ omega)| $$
ザ・ phase angle 開ループ伝達関数の度数は-
$$ \ phi = \ angle G(j \ omega)H(j \ omega)$$
Note −対数の底は10です。
ボード線図の基本
次の表は、開ループ伝達関数に存在する項の傾き、大きさ、および位相角の値を示しています。このデータは、ボード線図を描くときに役立ちます。
| 用語の種類 | G(jω)H(jω) | スロープ(dB / dec) | マグニチュード(dB) | 位相角(度) |
|---|---|---|---|---|
絶え間ない |
$ K $ |
$ 0 $ |
$ 20 \ log K $ |
$ 0 $ |
原点ゼロ |
$ j \ omega $ |
$ 20 $ |
$ 20 \ log \ omega $ |
$ 90 $ |
原点の「n」ゼロ |
$(j \ omega)^ n $ |
$ 20 \:n $ |
$ 20 \:n \ log \ omega $ |
$ 90 \:n $ |
原点のポール |
$ \ frac {1} {j \ omega} $ |
$ -20 $ |
$ -20 \ log \ omega $ |
$ -90 \:または\:270 $ |
原点の「n」極 |
$ \ frac {1} {(j \ omega)^ n} $ |
$ -20 \:n $ |
$ -20 \:n \ log \ omega $ |
$ -90 \:n \:または\:270 \:n $ |
単純なゼロ |
$ 1 + j \ omega r $ |
$ 20 $ |
$ 0 \:for \:\ omega <\ frac {1} {r} $ $ 20 \:\ log \ omega r \:for \:\ omega> \ frac {1} {r} $ |
$ 0 \:for \:\ omega <\ frac {1} {r} $ $ 90 \:for \:\ omega> \ frac {1} {r} $ |
シンプルポール |
$ \ frac {1} {1 + j \ omega r} $ |
$ -20 $ |
$ 0 \:for \:\ omega <\ frac {1} {r} $ $ -20 \:\ log \ omega r \:for \:\ omega> \ frac {1} {r} $ |
$ 0 \:for \:\ omega <\ frac {1} {r} $ $ -90 \:または\:270 \:for \:\ omega> \ frac {1} {r} $ |
二次微分項 |
$ \ omega_n ^ 2 \ left(1- \ frac {\ omega ^ 2} {\ omega_n ^ 2} + \ frac {2j \ delta \ omega} {\ omega_n} \ right)$ |
$ 40 $ |
$ 40 \:\ log \:\ omega_n \:for \:\ omega <\ omega_n $ $ 20 \:\ log \ :( 2 \ delta \ omega_n ^ 2)\:for \:\ omega = \ omega_n $ $ 40 \:\ log \:\ omega \:for \:\ omega> \ omega_n $ |
$ 0 \:for \:\ omega <\ omega_n $ $ 90 \:for \:\ omega = \ omega_n $ $ 180 \:for \:\ omega> \ omega_n $ |
二次積分項 |
$ \ frac {1} {\ omega_n ^ 2 \ left(1- \ frac {\ omega ^ 2} {\ omega_n ^ 2} + \ frac {2j \ delta \ omega} {\ omega_n} \ right)} $ |
$ -40 $ |
$ -40 \:\ log \:\ omega_n \:for \:\ omega <\ omega_n $ $ -20 \:\ log \ :( 2 \ delta \ omega_n ^ 2)\:for \:\ omega = \ omega_n $ $ -40 \:\ log \:\ omega \:for \:\ omega> \ omega_n $ |
$ -0 \:for \:\ omega <\ omega_n $ $ -90 \:for \:\ omega = \ omega_n $ $ -180 \:for \:\ omega> \ omega_n $ |
開ループ伝達関数$ G(s)H(s)= K $について考えてみます。
マグニチュード$ M = 20 \:\ log K $ dB
位相角$ \ phi = 0 $度
$ K = 1 $の場合、大きさは0dBです。
$ K> 1 $の場合、大きさは正になります。
$ K <1 $の場合、大きさは負になります。
次の図は、対応するボード線図を示しています。
振幅プロットは、周波数に依存しない水平線です。Kの値が1の場合、0dBの線自体が振幅プロットです。Kの正の値の場合、水平線は0dB線より上に$ 20 \:\ log K $ dBシフトします。Kの負の値の場合、水平線は$ 20 \:\ log K $ dBを0dB線より下にシフトします。ゼロ度の線自体は、Kのすべての正の値の位相プロットです。
開ループ伝達関数$ G(s)H(s)= s $について考えてみます。
マグニチュード$ M = 20 \ log \ omega $ dB
位相角$ \ phi = 90 ^ 0 $
$ \ omega = 0.1 $ rad / secの場合、大きさは-20dBです。
$ \ omega = 1 $ rad / secの場合、大きさは0dBです。
$ \ omega = 10 $ rad / secの場合、大きさは20dBです。
次の図は、対応するボード線図を示しています。


振幅プロットは線であり、20 dB / decの傾きを持っています。この線は$ \ omega = 0.1 $ rad / secで始まり、大きさは-20 dBで、同じ勾配で続きます。$ \ omega = 1 $ラジアン/秒で0dBの線に触れています。この場合、位相プロットは、90である0行。
開ループ伝達関数$ G(s)H(s)= 1 + s \ tau $について考えてみます。
マグニチュード$ M = 20 \:log \ sqrt {1 + \ omega ^ 2 \ tau ^ 2} $ dB
位相角$ \ phi = \ tan ^ {-1} \ omega \ tau $度
$ω<\ frac {1} {\ tau} $の場合、大きさは0 dB、位相角は0度です。
$のための\オメガ> \ FRAC {1}は{\タウ} $は、大きさが$ 20 \である:\ログ\オメガ\タウ$デシベルと位相角が90である0。
次の図は、対応するボード線図を示しています。

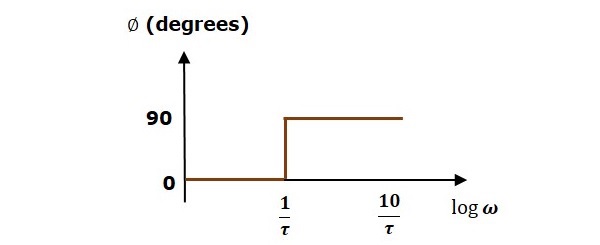
振幅プロットは、$ \ omega = \ frac {1} {\ tau} $ラジアン/秒まで0dBの振幅を持っています。$ \ omega = \ frac {1} {\ tau} $ rad / secから、20 dB / decの傾きがあります。この場合、位相プロットは$ \ omega = \ frac {1} {\ tau} $ rad / secまで0度の位相角を持ち、ここからは900の位相角を持ちます。このボード線図は、asymptotic Bode plot。
振幅と位相のプロットは直線で表されるため、正確なボード線図は漸近的なボード線図に似ています。唯一の違いは、正確なボード線図が直線ではなく単純な曲線を持つことです。
同様に、表に示されている開ループ伝達関数の他の項のボード線図を描くことができます。