DSP - Свойства Z-преобразования
В этой главе мы поймем основные свойства Z-преобразований.
Линейность
В нем говорится, что когда два или более отдельных дискретных сигнала умножаются на константы, их соответствующие Z-преобразования также будут умножены на те же константы.
Математически,
$$ a_1x_1 (n) + a_2x_2 (n) = a_1X_1 (z) + a_2X_2 (z) $$Proof - Мы это знаем,
$$ X (Z) = \ sum_ {n = - \ infty} ^ \ infty x (n) Z ^ {- n} $$$ = \ sum_ {n = - \ infty} ^ \ infty (a_1x_1 (n) + a_2x_2 (n)) Z ^ {- n} $
$ = a_1 \ sum_ {n = - \ infty} ^ \ infty x_1 (n) Z ^ {- n} + a_2 \ sum_ {n = - \ infty} ^ \ infty x_2 (n) Z ^ {- n} $
$ = a_1X_1 (z) + a_2X_2 (z) $ (Следовательно, доказано)
Здесь ROC - это $ ROC_1 \ bigcap ROC_2 $.
Временной сдвиг
Свойство сдвига во времени показывает, как изменение во временной области дискретного сигнала повлияет на Z-область, которую можно записать как;
$$ x (n-n_0) \ longleftrightarrow X (Z) Z ^ {- n} $$Или $ x (n-1) \ longleftrightarrow Z ^ {- 1} X (Z) $
Proof -
Пусть $ y (P) = X (PK) $
$ Y (z) = \ sum_ {p = - \ infty} ^ \ infty y (p) Z ^ {- p} $
$ = \ sum_ {p = - \ infty} ^ \ infty (x (pk)) Z ^ {- p} $
Пусть s = pk
$ = \ sum_ {s = - \ infty} ^ \ infty x (s) Z ^ {- (s + k)} $
$ = \ sum_ {s = - \ infty} ^ \ infty x (s) Z ^ {- s} Z ^ {- k} $
$ = Z ^ {- k} [\ sum_ {s = - \ infty} ^ \ infty x (m) Z ^ {- s}] $
$ = Z ^ {- k} X (Z) $ (Отсюда доказано)
Здесь ROC можно записать как Z = 0 (p> 0) или Z = ∞ (p <0)
пример
U (n) и U (n-1) могут быть построены следующим образом
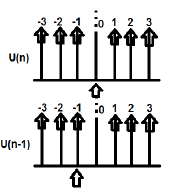
Z-преобразование U (n) cab можно записать как;
$ \ sum_ {n = - \ infty} ^ \ infty [U (n)] Z ^ {- n} = 1 $
Z-преобразование U (n-1) можно записать как;
$ \ sum_ {n = - \ infty} ^ \ infty [U (n-1)] Z ^ {- n} = Z ^ {- 1} $
Итак, здесь $ x (n-n_0) = Z ^ {- n_0} X (Z) $ (Следовательно, Доказано)
Масштабирование времени
Свойство Time Scaling сообщает нам, какой будет Z-домен сигнала, когда время масштабируется в его дискретной форме, которая может быть записана как;
$$ a ^ nx (n) \ longleftrightarrow X (a ^ {- 1} Z) $$Proof -
Пусть $ y (p) = a ^ {p} x (p) $
$ Y (P) = \ sum_ {p = - \ infty} ^ \ infty y (p) Z ^ {- p} $
$ = \ sum_ {p = - \ infty} ^ \ infty a ^ px (p) Z ^ {- p} $
$ = \ sum_ {p = - \ infty} ^ \ infty x (p) [a ^ {- 1} Z] ^ {- p} $
$ = X (a ^ {- 1} Z) $ (Отсюда доказано)
ROC: = Mod (ar1) <Mod (Z) <Mod (ar2), где Mod = модуль
пример
Давайте определим Z-преобразование $ x (n) = a ^ n \ cos \ omega n $, используя свойство масштабирования времени.
Solution -
Мы уже знаем, что Z-преобразование сигнала $ \ cos (\ omega n) $ определяется как -
$$ \ sum_ {n = - \ infty} ^ \ infty (\ cos \ omega n) Z ^ {- n} = (Z ^ 2-Z \ cos \ omega) / (Z ^ 2-2Z \ cos \ omega +1) $$
Теперь, применяя свойство масштабирования времени, Z-преобразование $ a ^ n \ cos \ omega n $ можно записать как;
$ \ sum_ {n = - \ infty} ^ \ infty (a ^ n \ cos \ omega n) Z ^ {- n} = X (a ^ {- 1} Z) $
$ = [(a ^ {- 1} Z) ^ 2- (a ^ {- 1} Z \ cos \ omega n)] / ((a ^ {- 1} Z) ^ 2-2 (a ^ {- 1} Z \ cos \ omega n) +1) $
$ = Z (Za \ cos \ omega) / (Z ^ 2-2az \ cos \ omega + a ^ 2) $
Последовательная дифференциация
Свойство последовательной дифференциации показывает, что Z-преобразование будет иметь место, когда мы дифференцируем дискретный сигнал во временной области относительно времени. Это показано ниже.
$$ \ frac {dx (n)} {dn} = (1-Z ^ {- 1}) X (Z) $$Proof -
Рассмотрим левую часть уравнения - $ \ frac {dx (n)} {dn} $
$$ = \ frac {[x (n) -x (n-1)]} {[n- (n-1)]} $$$ = x (n) -X (n-1) $
$ = x (Z) -Z ^ {- 1} x (Z) $
$ = (1-Z ^ {- 1}) x (Z) $ (Следовательно, доказано)
ROC: R1 <Mod (Z) <R2
пример
Найдем Z-преобразование сигнала по формуле $ x (n) = n ^ 2u (n) $
По свойству мы можем написать
$ Zz [nU (n)] = -Z \ frac {dZ [U (n)]} {dz} $
$ = -Z \ frac {d [\ frac {Z} {Z-1}]} {dZ} $
$ = Z / ((Z-1) ^ 2 $
$ = y (пусть) $
Теперь Z [ny] можно найти, снова применив свойство
$ Z (n, y) = -Z \ frac {dy} {dz} $
$ = -Z \ frac {d [Z / (Z-1) ^ 3]} {dz} $
$ = Z (Z + 1) / (Z-1) ^ 2 $
Свертка
Это отображает изменение в Z-области системы, когда свертка имеет место в форме дискретного сигнала, которую можно записать как -
$ x_1 (n) * x_2 (n) \ longleftrightarrow X_1 (Z) .X_2 (Z) $
Proof -
$ X (Z) = \ sum_ {n = - \ infty} ^ \ infty x (n) Z ^ {- n} $
$ = \ sum_ {n = - \ infty} ^ \ infty [\ sum_ {k = - \ infty} ^ \ infty x_1 (k) x_2 (nk)] Z ^ {- n} $
$ = \ sum_ {k = - \ infty} ^ \ infty x_1 (k) [\ sum_n ^ \ infty x_2 (nk) Z ^ {- n}] $
$ = \ sum_ {k = - \ infty} ^ \ infty x_1 (k) [\ sum_ {n = - \ infty} ^ \ infty x_2 (nk) Z ^ {- (nk)} Z ^ {- k}] $
Пусть nk = l, тогда приведенное выше уравнение cab записывается как -
$ X (Z) = \ sum_ {k = - \ infty} ^ \ infty x_1 (k) [Z ^ {- k} \ sum_ {l = - \ infty} ^ \ infty x_2 (l) Z ^ {- l }] $
$ = \ sum_ {k = - \ infty} ^ \ infty x_1 (k) X_2 (Z) Z ^ {- k} $
$ = X_2 (Z) \ sum_ {k = - \ infty} ^ \ infty x_1 (Z) Z ^ {- k} $
$ = X_1 (Z) .X_2 (Z) $ (Следовательно, доказано)
ROC: $ ROC \ bigcap ROC2 $
пример
Найдем свертку двух сигналов
$ x_1 (n) = \ lbrace 3, -2,2 \ rbrace $ ... (уравнение 1)
$ x_2 (n) = \ lbrace 2,0 \ leq 4 \ quad и \ quad 0 \ quad в другом месте \ rbrace $ ... (уравнение 2)
Z-преобразование первого уравнения можно записать как;
$ \ sum_ {n = - \ infty} ^ \ infty x_1 (n) Z ^ {- n} $
$ = 3-2Z ^ {- 1} + 2Z ^ {- 2} $
Z-преобразование второго сигнала можно записать как;
$ \ sum_ {n = - \ infty} ^ \ infty x_2 (n) Z ^ {- n} $
$ = 2 + 2Z ^ {- 1} + 2Z ^ {- 2} + 2Z ^ {- 3} + 2Z ^ {- 4} $
Итак, свертка двух вышеуказанных сигналов определяется следующим образом:
$ X (Z) = [x_1 (Z) ^ * x_2 (Z)] $
$ = [3-2Z ^ {- 1} + 2Z ^ {- 2}] \ times [2 + 2Z ^ {- 1} + 2Z ^ {- 2} + 2Z ^ {- 3} + 2Z ^ {- 4 }] $
$ = 6 + 2Z ^ {- 1} + 6Z ^ {- 2} + 6Z ^ {- 3} + ... \ quad ... \ quad ... $
Применяя обратное Z-преобразование, получаем,
$ x (n) = \ lbrace 6,2,6,6,6,0,4 \ rbrace $
Теорема о начальном значении
Если x (n) - причинная последовательность, Z-преобразование которой имеет вид X (z), то теорема о начальном значении может быть записана как;
$ X (n) (при \ quad n = 0) = \ lim_ {z \ to \ infty} X (z) $
Proof - Мы это знаем,
$ X (Z) = \ sum_ {n = 0} ^ \ infty x (n) Z ^ {- n} $
Расширяя вышеуказанный ряд, получаем:
$ = X (0) Z ^ 0 + X (1) Z ^ {- 1} + X (2) Z ^ {- 2} + ... \ quad ... $
$ = X (0) \ times 1 + X (1) Z ^ {- 1} + X (2) Z ^ {- 2} + ... \ quad ... $
В приведенном выше случае, если Z → ∞, то $ Z ^ {- n} \ rightarrow 0 $ (поскольку n> 0)
Следовательно, мы можем сказать;
$ \ lim_ {z \ to \ infty} X (z) = X (0) $ (Следовательно, доказано)
Теорема о конечном значении
Теорема о конечном значении утверждает, что если Z-преобразование сигнала представлено как X (Z) и все полюса находятся внутри круга, то его окончательное значение обозначается как x (n) или X (∞) и может быть записано как -
$ X (\ infty) = \ lim_ {n \ to \ infty} X (n) = \ lim_ {z \ to 1} [X (Z) (1-Z ^ {- 1})] $
Conditions -
- Это применимо только для причинных систем.
- $ X (Z) (1-Z ^ {- 1}) $ должен иметь полюса внутри единичной окружности в Z-плоскости.
Proof - Мы знаем, что
$ Z ^ + [x (n + 1) -x (n)] = \ lim_ {k \ to \ infty} \ sum_ {n = 0} ^ kZ ^ {- n} [x (n + 1) -x (n)] $
$ \ Rightarrow Z ^ + [x (n + 1)] - Z ^ + [x (n)] = \ lim_ {k \ to \ infty} \ sum_ {n = 0} ^ kZ ^ {- n} [x (n + 1) -x (n)] $
$ \ Rightarrow Z [X (Z) ^ + - x (0)] - X (Z) ^ + = \ lim_ {k \ to \ infty} \ sum_ {n = 0} ^ kZ ^ {- n} [x (n + 1) -x (n)] $
Здесь мы можем применить расширенное свойство одностороннего Z-преобразования. Итак, приведенное выше уравнение можно переписать как:
$ Z ^ + [x (n + 1)] = Z [X (2) ^ + - x (0) Z ^ 0] = Z [X (Z) ^ + - x (0)] $
Теперь положив z = 1 в приведенное выше уравнение, мы можем расширить приведенное выше уравнение -
$ \ lim_ {k \ to \ infty} {[x (1) -x (0) + x (6) -x (1) + x (3) -x (2) + ... \ quad ... \ quad ... + x (x + 1) -x (k)]} $
Это можно сформулировать так:
$ X (\ infty) = \ lim_ {n \ to \ infty} X (n) = \ lim_ {z \ to 1} [X (Z) (1-Z ^ {- 1})] $ (Следовательно, доказано)
пример
Найдем начальное и конечное значение x (n), сигнал которого задается формулой
$ X (Z) = 2 + 3Z ^ {- 1} + 4Z ^ {- 2} $
Solution - Давайте сначала найдем начальное значение сигнала, применив теорему
$ х (0) = \ lim_ {z \ to \ infty} X (Z) $
$ = \ lim_ {z \ to \ infty} [2 + 3Z ^ {- 1} + 4Z ^ {- 2}] $
$ = 2 + (\ frac {3} {\ infty}) + (\ frac {4} {\ infty}) = 2 $
Теперь найдем Конечное значение сигнала, применив теорему
$ x (\ infty) = \ lim_ {z \ to \ infty} [(1-Z ^ {- 1}) X (Z)] $
$ = \ lim_ {z \ to \ infty} [(1-Z ^ {- 1}) (2 + 3Z ^ {- 1} + 4Z ^ {- 2})] $
$ = \ lim_ {z \ to \ infty} [2 + Z ^ {- 1} + Z ^ {- 2} -4Z ^ {- 3}] $
$ = 2 + 1 + 1-4 = 0 $
Some other properties of Z-transform are listed below -
Дифференциация по частоте
Он дает изменение в Z-области сигнала, когда его дискретный сигнал дифференцируется по времени.
$ nx (n) \ longleftrightarrow -Z \ frac {dX (z)} {dz} $
Его ROC можно записать как;
$ r_2 <Mod (Z) <r_1 $
пример
Давайте найдем значение x (n) посредством дифференцирования по частоте, дискретный сигнал которого в Z-области задается как $ x (n) \ longleftrightarrow X (Z) = log (1 + aZ ^ {- 1}) $
По свойству мы можем написать, что
$ nx (n) \ longleftrightarrow -Z \ frac {dx (Z)} {dz} $
$ = -Z [\ frac {-aZ ^ {- 2}} {1 + aZ ^ {- 1}}] $
$ = (aZ ^ {- 1}) / (1 + aZ ^ {- 1}) $
$ = 1-1 / (1 + aZ ^ {- 1}) $
$ nx (n) = \ delta (n) - (- a) ^ nu (n) $
$ \ Rightarrow x (n) = 1 / n [\ delta (n) - (- a) ^ nu (n)] $
Умножение во времени
Он дает изменение в Z-области сигнала, когда умножение происходит на дискретном уровне сигнала.
$ x_1 (n) .x_2 (n) \ longleftrightarrow (\ frac {1} {2 \ Pi j}) [X1 (Z) * X2 (Z)] $
Спряжение во времени
Это изображает представление сопряженного дискретного сигнала в Z-области.
$ X ^ * (n) \ longleftrightarrow X ^ * (Z ^ *) $