제어 시스템-블록 다이어그램 감소
이전 장에서 논의 된 개념은 블록 다이어그램을 축소 (단순화)하는 데 유용합니다.
블록 다이어그램 축소 규칙
많은 블록, 합산 지점 및 이륙 지점이있는 블록 다이어그램을 단순화 (축소)하려면 다음 규칙을 따르십시오.
Rule 1 − 직렬로 연결된 블록을 확인하고 단순화합니다.
Rule 2 − 병렬로 연결된 블록을 확인하고 단순화합니다.
Rule 3 − 피드백 루프에 연결된 블록을 확인하고 단순화합니다.
Rule 4 − 단순화하면서 이륙 지점에 어려움이있을 경우 오른쪽으로 이동합니다.
Rule 5 − 단순화 중 포인트 합산에 어려움이있는 경우 왼쪽으로 이동합니다.
Rule 6 − 단순화 된 형태 (예 : 단일 블록)를 얻을 때까지 위 단계를 반복합니다.
Note −이 단일 블록에있는 전달 함수는 전체 블록 다이어그램의 전달 함수입니다.
예
다음 그림에 표시된 블록 다이어그램을 고려하십시오. 블록 다이어그램 축소 규칙을 사용하여이 블록 다이어그램을 단순화 (축소)합시다.

Step 1− 블록 $ G_1 $ 및 $ G_2 $에 대해 규칙 1을 사용합니다. 블록 $ G_3 $ 및 $ G_4 $에 대해 규칙 2를 사용하십시오. 수정 된 블록 다이어그램은 다음 그림과 같습니다.

Step 2− 블록 $ G_1G_2 $ 및 $ H_1 $에 대해 규칙 3을 사용합니다. $ G_5 $ 블록 이후 이륙 지점을 이동하려면 규칙 4를 사용하십시오. 수정 된 블록 다이어그램은 다음 그림과 같습니다.

Step 3− 블록 $ (G_3 + G_4) $ 및 $ G_5 $에 대해 규칙 1을 사용합니다. 수정 된 블록 다이어그램은 다음 그림과 같습니다.

Step 4− 블록 $ (G_3 + G_4) G_5 $ 및 $ H_3 $에 대해 규칙 3을 사용합니다. 수정 된 블록 다이어그램은 다음 그림과 같습니다.

Step 5− 직렬로 연결된 블록에는 규칙 1을 사용하십시오. 수정 된 블록 다이어그램은 다음 그림과 같습니다.

Step 6− 피드백 루프에 연결된 블록에는 규칙 3을 사용하십시오. 수정 된 블록 다이어그램은 다음 그림과 같습니다. 이것은 단순화 된 블록 다이어그램입니다.
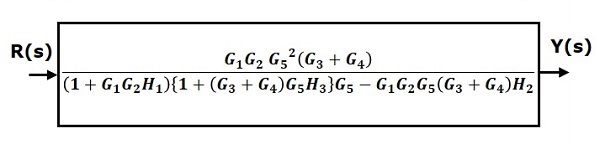
따라서 시스템의 전달 함수는
$$ \ frac {Y (s)} {R (s)} = \ frac {G_1G_2G_5 ^ 2 (G_3 + G_4)} {(1 + G_1G_2H_1) \ lbrace 1+ (G_3 + G_4) G_5H_3 \ rbrace G_5-G_1G_2G_5 (G_3 + G_4) H_2} $$
Note − 여러 입력이있는 블록 다이어그램의 전달 함수를 계산하려면 다음 단계를 따르십시오.
Step 1 − 한 번에 하나의 입력을 고려하여 블록 다이어그램의 전달 함수를 찾고 나머지 입력을 0으로 만듭니다.
Step 2 − 나머지 입력에 대해 1 단계를 반복합니다.
Step 3 − 모든 전달 함수를 추가하여 전체 전달 함수를 얻습니다.
블록 다이어그램 축소 프로세스는 복잡한 시스템의 경우 더 많은 시간이 걸립니다. 왜냐하면 각 단계 후에 (부분적으로 단순화 된) 블록 다이어그램을 그려야하기 때문입니다. 따라서이 단점을 극복하려면 신호 흐름 그래프 (표현)를 사용하십시오.
다음 두 장에서는 신호 흐름 그래프와 관련된 개념, 즉 주어진 블록 다이어그램에서 신호 흐름 그래프를 표현하는 방법과 감소 프로세스를 수행하지 않고 게인 공식을 사용하여 전달 함수를 계산하는 방법에 대해 설명합니다.