การประมวลผลสัญญาณดิจิทัล - คู่มือฉบับย่อ
คำจำกัดความ
สิ่งใดก็ตามที่มีข้อมูลสามารถเรียกได้ว่าเป็นสัญญาณ นอกจากนี้ยังสามารถกำหนดเป็นปริมาณทางกายภาพที่แตกต่างกันไปตามเวลาอุณหภูมิความดันหรือตัวแปรอิสระเช่นสัญญาณเสียงพูดหรือสัญญาณวิดีโอ
กระบวนการทำงานที่ลักษณะของสัญญาณ (แอมพลิจูดรูปร่างเฟสความถี่ ฯลฯ ) มีการเปลี่ยนแปลงเรียกว่าการประมวลผลสัญญาณ
Note- สัญญาณที่ไม่ต้องการรบกวนสัญญาณหลักเรียกว่าสัญญาณรบกวน ดังนั้นสัญญาณรบกวนก็เป็นสัญญาณเช่นกัน แต่ไม่ต้องการ
ตามการนำเสนอและการประมวลผลสัญญาณสามารถแบ่งออกเป็นหมวดหมู่ต่างๆโดยละเอียดซึ่งจะกล่าวถึงด้านล่าง
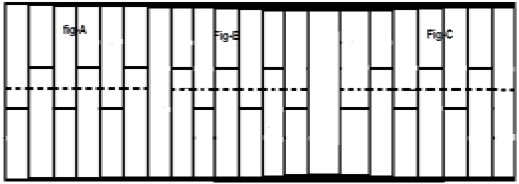
สัญญาณเวลาต่อเนื่อง
สัญญาณเวลาต่อเนื่องถูกกำหนดตามช่วงเวลาต่อเนื่องและแสดงด้วยตัวแปรอิสระต่อเนื่อง สัญญาณเวลาต่อเนื่องมักเรียกว่าสัญญาณอนาล็อก
สัญญาณประเภทนี้แสดงความต่อเนื่องทั้งในแอมพลิจูดและเวลา สิ่งเหล่านี้จะมีค่าในแต่ละช่วงเวลา ฟังก์ชันไซน์และโคไซน์เป็นตัวอย่างที่ดีที่สุดของสัญญาณบอกเวลาต่อเนื่อง
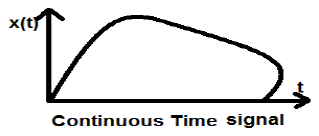
สัญญาณที่แสดงด้านบนเป็นตัวอย่างของสัญญาณเวลาต่อเนื่องเนื่องจากเราสามารถรับค่าของสัญญาณได้ในแต่ละช่วงเวลา
สัญญาณเวลาไม่ต่อเนื่อง
สัญญาณซึ่งกำหนดในเวลาที่ไม่ต่อเนื่องเรียกว่าสัญญาณไม่ต่อเนื่อง ดังนั้นตัวแปรอิสระทุกตัวจึงมีค่าที่แตกต่างกัน ดังนั้นจึงแสดงเป็นลำดับของตัวเลข
แม้ว่าสัญญาณเสียงพูดและวิดีโอจะมีสิทธิพิเศษในการแสดงทั้งในรูปแบบเวลาต่อเนื่องและไม่ต่อเนื่อง ภายใต้สถานการณ์บางอย่างมันเหมือนกัน แอมพลิจูดยังแสดงลักษณะที่ไม่ต่อเนื่อง ตัวอย่างที่สมบูรณ์แบบคือสัญญาณดิจิตอล ซึ่งแอมพลิจูดและเวลาทั้งสองไม่ต่อเนื่อง
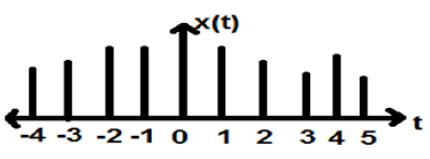
รูปด้านบนแสดงลักษณะแอมพลิจูดแบบไม่ต่อเนื่องของสัญญาณที่ไม่ต่อเนื่องในช่วงเวลาหนึ่ง ในทางคณิตศาสตร์สัญญาณประเภทนี้สามารถจัดรูปแบบเป็น;
$$x = \left \{ x\left [ n \right ] \right \},\quad -\infty < n< \infty$$โดยที่nคือจำนวนเต็ม
มันเป็นลำดับของตัวเลข x ที่ n THตัวเลขในลำดับจะแสดงเป็น x [N]
ในการทดสอบระบบโดยทั่วไปจะใช้สัญญาณมาตรฐานหรือสัญญาณพื้นฐาน สัญญาณเหล่านี้เป็นส่วนประกอบพื้นฐานสำหรับสัญญาณที่ซับซ้อนจำนวนมาก ดังนั้นจึงมีบทบาทสำคัญมากในการศึกษาสัญญาณและระบบ
Unit Impulse หรือ Delta Function
สัญญาณที่ตรงตามเงื่อนไข $\delta(t) = \lim_{\epsilon \to \infty} x(t)$เรียกว่าสัญญาณอิมพัลส์ของหน่วย สัญญาณนี้มีแนวโน้มที่จะไม่มีที่สิ้นสุดเมื่อ t = 0 และมีแนวโน้มที่จะเป็นศูนย์เมื่อ t ≠ 0 เช่นนั้นพื้นที่ใต้เส้นโค้งจะเท่ากับหนึ่งเสมอ ฟังก์ชันเดลต้ามีแอมพลิจูดเป็นศูนย์ทุกที่ excunit_impulse.jpgept ที่ t = 0

คุณสมบัติของสัญญาณอิมพัลส์ยูนิต
- δ (t) เป็นสัญญาณคู่
- δ (t) เป็นตัวอย่างของสัญญาณพลังงานหรือพลังงาน (NENP)
- พื้นที่ของสัญญาณอิมพัลส์ของหน่วยสามารถเขียนเป็น; $$A = \int_{-\infty}^{\infty} \delta (t)dt = \int_{-\infty}^{\infty} \lim_{\epsilon \to 0} x(t) dt = \lim_{\epsilon \to 0} \int_{-\infty}^{\infty} [x(t)dt] = 1$$
- น้ำหนักหรือความแรงของสัญญาณสามารถเขียนเป็น; $$y(t) = A\delta (t)$$
- พื้นที่ของสัญญาณอิมพัลส์ถ่วงน้ำหนักสามารถเขียนเป็น - $$y (t) = \int_{-\infty}^{\infty} y (t)dt = \int_{-\infty}^{\infty} A\delta (t) = A[\int_{-\infty}^{\infty} \delta (t)dt ] = A = 1 = Wigthedimpulse$$
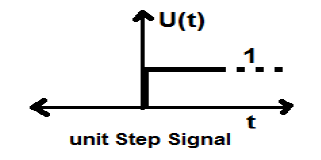
สัญญาณขั้นตอนของหน่วย
สัญญาณซึ่งเป็นไปตามเงื่อนไขสองข้อต่อไปนี้ -
- $U(t) = 1(when\quad t \geq 0 )and$
- $U(t) = 0 (when\quad t < 0 )$
เรียกว่าสัญญาณขั้นตอนของหน่วย
มีคุณสมบัติในการแสดงความไม่ต่อเนื่องที่ t = 0 ณ จุดที่ไม่ต่อเนื่องค่าสัญญาณจะถูกกำหนดโดยค่าเฉลี่ยของค่าสัญญาณ สัญญาณนี้เกิดขึ้นก่อนและหลังจุดที่ไม่ต่อเนื่อง (ตามปรากฏการณ์ของกิบบ์)
หากเราเพิ่มสัญญาณขั้นตอนลงในสัญญาณขั้นตอนอื่นที่มีการปรับขนาดเวลาผลลัพธ์จะเป็นเอกภาพ เป็นสัญญาณประเภทกำลังและค่าของกำลัง 0.5 ค่า RMS (รูทเฉลี่ยกำลังสอง) คือ 0.707 และค่าเฉลี่ยคือ 0.5
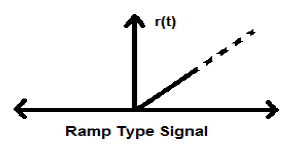
สัญญาณทางลาด
การรวมสัญญาณขั้นตอนส่งผลให้เกิดสัญญาณทางลาด มันแสดงด้วย r (t) สัญญาณทางลาดยังเป็นไปตามเงื่อนไข$r(t) = \int_{-\infty}^{t} U(t)dt = tU(t)$. ไม่ใช่สัญญาณประเภทพลังงานหรือพลังงาน (NENP)
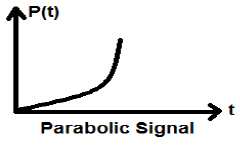
สัญญาณพาราโบลา
การรวมสัญญาณ Ramp นำไปสู่สัญญาณพาราโบลา มันแสดงด้วย p (t) สัญญาณพาราโบลายังเป็นไปตามเงื่อนไขของเขา$p(t) = \int_{-\infty}^{t} r(t)dt = (t^{2}/2)U(t)$. ไม่ใช่สัญญาณประเภทพลังงานหรือพลังงาน (NENP)
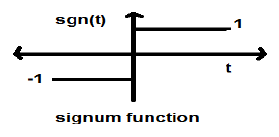
ฟังก์ชัน Signum
ฟังก์ชันนี้แสดงเป็น
$$sgn(t) = \begin{cases}1 & for\quad t >0\\-1 & for\quad t<0\end{cases}$$มันเป็นสัญญาณประเภทพลังงาน ค่ากำลังและค่า RMS (ค่าเฉลี่ยกำลังสอง) ทั้งสองคือ 1 ค่าเฉลี่ยของฟังก์ชันเครื่องหมายเป็นศูนย์
ฟังก์ชัน Sinc
นอกจากนี้ยังเป็นฟังก์ชันของไซน์และเขียนเป็น -
$$SinC(t) = \frac{Sin\Pi t}{\Pi T} = Sa(\Pi t)$$คุณสมบัติของฟังก์ชัน Sinc
มันเป็นสัญญาณประเภทพลังงาน
$Sinc(0) = \lim_{t \to 0}\frac{\sin \Pi t}{\Pi t} = 1$
$Sinc(\infty) = \lim_{t \to \infty}\frac{\sin \Pi \infty}{\Pi \infty} = 0$ (ช่วงของsinπ∞แตกต่างกันไประหว่าง -1 ถึง +1 แต่อะไรก็ตามที่หารด้วยอินฟินิตี้จะเท่ากับศูนย์)
-
ถ้า $ \sin c(t) = 0 => \sin \Pi t = 0$
$\Rightarrow \Pi t = n\Pi$
$\Rightarrow t = n (n \neq 0)$
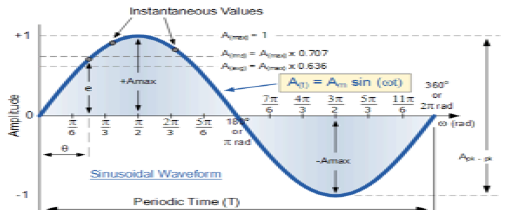
สัญญาณไซน์
สัญญาณซึ่งมีลักษณะต่อเนื่องเรียกว่าสัญญาณต่อเนื่อง รูปแบบทั่วไปของสัญญาณไซน์คือ
$$x(t) = A\sin (\omega t + \phi )$$ที่นี่
A = แอมพลิจูดของสัญญาณ
ω = ความถี่เชิงมุมของสัญญาณ (วัดเป็นเรเดียน)
φ = มุมเฟสของสัญญาณ (วัดเป็นเรเดียน)
แนวโน้มของสัญญาณนี้คือการเกิดซ้ำหลังจากช่วงเวลาหนึ่งดังนั้นจึงเรียกว่าสัญญาณเป็นระยะ ช่วงเวลาของสัญญาณกำหนดเป็น;
$$T = \frac{2\pi }{\omega }$$มุมมองแผนภาพของสัญญาณไซน์แสดงไว้ด้านล่าง
ฟังก์ชันสี่เหลี่ยม
สัญญาณจะบอกว่าเป็นประเภทฟังก์ชันสี่เหลี่ยมหากเป็นไปตามเงื่อนไขต่อไปนี้ -
$$\pi(\frac{t}{\tau}) = \begin{cases}1, & for\quad t\leq \frac{\tau}{2}\\0, & Otherwise\end{cases}$$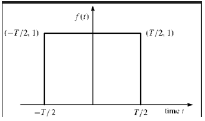
ด้วยความสมมาตรเกี่ยวกับแกน Y สัญญาณนี้จึงเรียกว่าสัญญาณคู่
สัญญาณพัลส์สามเหลี่ยม
สัญญาณใด ๆ ที่เป็นไปตามเงื่อนไขต่อไปนี้เรียกว่าสัญญาณสามเหลี่ยม
$$\Delta(\frac{t}{\tau}) = \begin{cases}1-(\frac{2|t|}{\tau}) & for|t|<\frac{\tau}{2}\\0 & for|t|>\frac{\tau}{2}\end{cases}$$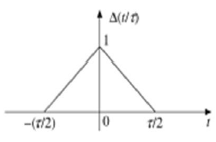
สัญญาณนี้สมมาตรเกี่ยวกับแกน Y ดังนั้นจึงเรียกได้ว่าเป็นสัญญาณคู่
เราได้เห็นว่าสัญญาณพื้นฐานสามารถแสดงในโดเมนเวลาต่อเนื่องได้อย่างไร ให้เราดูว่าสัญญาณพื้นฐานสามารถแสดงใน Discrete Time Domain ได้อย่างไร
ลำดับอิมพัลส์หน่วย
แสดงเป็นδ (n) ในโดเมนเวลาไม่ต่อเนื่องและสามารถกำหนดเป็น;
$$\delta(n)=\begin{cases}1, & for \quad n=0\\0, & Otherwise\end{cases}$$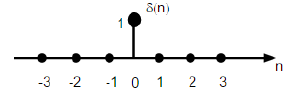
สัญญาณขั้นตอนของหน่วย
สัญญาณขั้นตอนหน่วยเวลาไม่ต่อเนื่องถูกกำหนดให้เป็น;
$$U(n)=\begin{cases}1, & for \quad n\geq0\\0, & for \quad n<0\end{cases}$$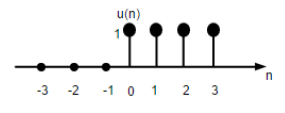
รูปด้านบนแสดงการแสดงกราฟิกของฟังก์ชันขั้นตอนที่ไม่ต่อเนื่อง
ฟังก์ชัน Unit Ramp
ฟังก์ชันทางลาดหน่วยแยกสามารถกำหนดเป็น -
$$r(n)=\begin{cases}n, & for \quad n\geq0\\0, & for \quad n<0\end{cases}$$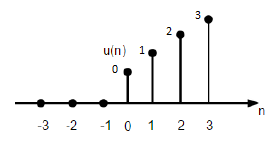
รูปที่ระบุด้านบนแสดงการแสดงกราฟิกของสัญญาณทางลาดที่ไม่ต่อเนื่อง
ฟังก์ชันพาราโบลา
ฟังก์ชันพาราโบลาของหน่วยไม่ต่อเนื่องแสดงเป็น p (n) และสามารถกำหนดเป็น;
$$p(n) = \begin{cases}\frac{n^{2}}{2} ,& for \quad n\geq0\\0, & for \quad n<0\end{cases}$$ในแง่ของฟังก์ชันขั้นตอนหน่วยสามารถเขียนเป็น;
$$P(n) = \frac{n^{2}}{2}U(n)$$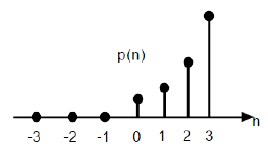
รูปที่ให้ไว้ด้านบนแสดงการแสดงกราฟิกของลำดับพาราโบลา
สัญญาณไซน์
สัญญาณเวลาต่อเนื่องทั้งหมดเป็นระยะ ลำดับไซน์ไทม์ที่ไม่ต่อเนื่องอาจเป็นระยะหรือไม่ก็ได้ ขึ้นอยู่กับค่าของω เพื่อให้สัญญาณเวลาไม่ต่อเนื่องเป็นคาบความถี่เชิงมุมωต้องเป็นผลคูณที่มีเหตุผลของ2π
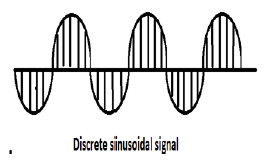
สัญญาณไซน์ที่ไม่ต่อเนื่องแสดงในรูปด้านบน
รูปแบบที่ไม่ต่อเนื่องของสัญญาณไซน์สามารถแสดงในรูปแบบ -
$$x(n) = A\sin(\omega n + \phi)$$ที่นี่ A, ωและφมีความหมายตามปกติและ n คือจำนวนเต็ม ช่วงเวลาของสัญญาณไซน์ไม่ต่อเนื่องกำหนดโดย -
$$N =\frac{2\pi m}{\omega}$$โดยที่ N และ m เป็นจำนวนเต็ม
สัญญาณเวลาต่อเนื่องสามารถจำแนกได้ตามเงื่อนไขหรือการดำเนินการที่แตกต่างกันของสัญญาณ
สัญญาณคู่และคี่
แม้แต่สัญญาณ
สัญญาณบอกว่าเป็นไปตามเงื่อนไขต่อไปนี้
$$x(-t) = x(t)$$การย้อนเวลาของสัญญาณไม่ได้หมายความถึงการเปลี่ยนแปลงใด ๆ ของแอมพลิจูดที่นี่ ตัวอย่างเช่นพิจารณาคลื่นสามเหลี่ยมที่แสดงด้านล่าง
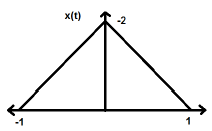
สัญญาณสามเหลี่ยมคือสัญญาณคู่ เนื่องจากมันสมมาตรเกี่ยวกับแกน Y เราสามารถพูดได้ว่าเป็นภาพสะท้อนเกี่ยวกับแกน Y
พิจารณาสัญญาณอื่นดังแสดงในรูปด้านล่าง
เราจะเห็นว่าสัญญาณข้างบนนั้นมีความสมมาตรเกี่ยวกับแกน Y
สัญญาณแปลก
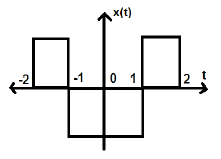
สัญญาณจะบอกว่าเป็นเลขคี่หากเป็นไปตามเงื่อนไขต่อไปนี้
$$x(-t) = -x(t)$$ที่นี่ทั้งการย้อนเวลาและการเปลี่ยนแปลงแอมพลิจูดจะเกิดขึ้นพร้อมกัน
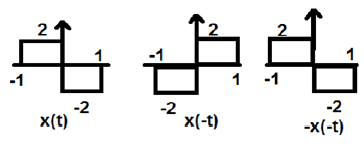
ในรูปด้านบนเราจะเห็นสัญญาณขั้นตอน x (t) ในการทดสอบว่าเป็นสัญญาณคี่หรือไม่อันดับแรกเราทำการย้อนเวลาเช่น x (-t) และผลลัพธ์จะเป็นดังที่แสดงในรูป จากนั้นเรากลับแอมพลิจูดของสัญญาณผลลัพธ์คือ –x (-t) และเราจะได้ผลลัพธ์ดังแสดงในรูป
ถ้าเราเปรียบเทียบรูปคลื่นแรกและรูปที่สามเราจะเห็นว่ามันเหมือนกันนั่นคือ x (t) = -x (-t) ซึ่งตรงตามเกณฑ์ของเรา ดังนั้นสัญญาณข้างต้นจึงเป็นสัญญาณคี่
ผลลัพธ์ที่สำคัญบางประการที่เกี่ยวข้องกับสัญญาณคู่และคี่มีให้ด้านล่าง
- Even × Even = คู่
- คี่×คี่ = คู่
- Even × Odd = คี่
- Even ± Even = Even
- คี่±คี่ = คี่
- Even ± Odd = ทั้งคู่หรือคี่
การแสดงสัญญาณใด ๆ ในรูปแบบคู่หรือคี่
สัญญาณบางอย่างไม่สามารถจำแนกเป็นประเภทคู่หรือคี่ได้โดยตรง สิ่งเหล่านี้แสดงเป็นการรวมกันของทั้งสัญญาณคู่และคี่
$$x(t)\rightarrow x_{e}(t)+x_{0}(t)$$โดยที่ x e (t) แทนสัญญาณคู่และ x o (t) แทนสัญญาณคี่
$$x_{e}(t)=\frac{[x(t)+x(-t)]}{2}$$และ
$$x_{0}(t)=\frac{[x(t)-x(-t)]}{2}$$ตัวอย่าง
ค้นหาส่วนคู่และคี่ของสัญญาณ $x(n) = t+t^{2}+t^{3}$
Solution - จากการย้อนกลับ x (n) เราจะได้
$$x(-n) = -t+t^{2}-t^{3}$$
ตอนนี้ตามสูตรส่วนคู่
$$x_{e}(t) = \frac{x(t)+x(-t)}{2}$$
$$= \frac{[(t+t^{2}+t^{3})+(-t+t^{2}-t^{3})]}{2}$$
$$= t^{2}$$
ในทำนองเดียวกันตามสูตรส่วนที่แปลกคือ
$$x_{0}(t)=\frac{[x(t)-x(-t)]}{2}$$
$$= \frac{[(t+t^{2}+t^{3})-(-t+t^{2}-t^{3})]}{2}$$
$$= t+t^{3}$$
สัญญาณเป็นระยะและไม่เป็นระยะ
สัญญาณเป็นระยะ
สัญญาณเป็นระยะจะทำซ้ำตัวเองหลังจากช่วงเวลาหนึ่ง เราสามารถแสดงสิ่งนี้ในรูปสมการเป็น -
$$x(t) = x(t)\pm nT$$โดยที่ n = จำนวนเต็ม (1,2,3 ……)
T = ช่วงเวลาพื้นฐาน (FTP) ≠ 0 และ≠∞
ช่วงเวลาพื้นฐาน (FTP) เป็นค่าบวกและค่าคงที่ที่เล็กที่สุดของเวลาที่สัญญาณเป็นระยะ
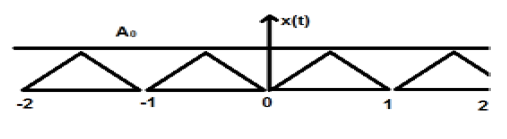
สัญญาณสามเหลี่ยมแสดงในรูปด้านบนของแอมพลิจูด A ที่นี่สัญญาณจะเกิดซ้ำทุก 1 วินาที ดังนั้นเราสามารถพูดได้ว่าสัญญาณเป็นระยะและ FTP คือ 1 วินาที
สัญญาณที่ไม่เป็นระยะ
เราสามารถพูดได้ง่ายๆว่าสัญญาณที่ไม่เป็นระยะนั้นไม่มีลักษณะเป็นช่วง ๆ เห็นได้ชัดว่าสัญญาณเหล่านี้จะไม่เกิดซ้ำหลังจากช่วงเวลาใด ๆ
สัญญาณที่ไม่เป็นระยะไม่เป็นไปตามรูปแบบที่แน่นอน ดังนั้นจึงไม่มีสมการทางคณิตศาสตร์ที่เฉพาะเจาะจงสามารถอธิบายได้
สัญญาณพลังงานและพลังงาน
สัญญาณกล่าวว่าเป็นสัญญาณพลังงานหากและเฉพาะในกรณีที่พลังงานทั้งหมดที่มีอยู่นั้น จำกัด และไม่ใช่ศูนย์ (0 <E <∞) ดังนั้นสำหรับสัญญาณประเภทพลังงานใด ๆ สัญญาณปกติทั้งหมดจะ จำกัด และไม่เป็นศูนย์
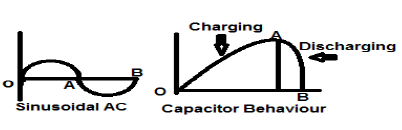
สัญญาณกระแสไฟฟ้ากระแสสลับไซน์เป็นตัวอย่างที่สมบูรณ์แบบของสัญญาณประเภทพลังงานเนื่องจากอยู่ในครึ่งรอบที่เป็นบวกในกรณีหนึ่งจากนั้นเป็นค่าลบในครึ่งรอบถัดไป ดังนั้นกำลังเฉลี่ยจึงกลายเป็นศูนย์
ตัวเก็บประจุแบบไม่สูญเสียเป็นตัวอย่างที่สมบูรณ์แบบของสัญญาณประเภทพลังงานเนื่องจากเมื่อเชื่อมต่อกับแหล่งที่มามันจะชาร์จได้ถึงระดับที่เหมาะสมและเมื่อถอดแหล่งที่มาตัวเก็บประจุจะกระจายพลังงานจำนวนเท่ากันผ่านโหลดและทำให้พลังงานเฉลี่ย ศูนย์.
สำหรับสัญญาณ จำกัด ใด ๆ x (t) พลังงานสามารถเป็นสัญลักษณ์เป็น E และเขียนเป็น;
$$E = \int_{-\infty}^{+\infty} x^{2}(t)dt$$ความหนาแน่นสเปกตรัมของสัญญาณประเภทพลังงานให้ปริมาณพลังงานที่กระจายในระดับความถี่ต่างๆ
สัญญาณประเภทพลังงาน
สัญญาณกล่าวว่าเป็นสัญญาณประเภทพลังงานถ้าและเฉพาะในกรณีที่กำลังเฉลี่ยปกติจะ จำกัด และไม่ใช่ศูนย์เช่น (0 <p <∞) สำหรับสัญญาณประเภทพลังงานกำลังเฉลี่ยปกติจะ จำกัด และไม่เป็นศูนย์ สัญญาณประจำงวดเกือบทั้งหมดเป็นสัญญาณกำลังและกำลังเฉลี่ยของพวกเขานั้น จำกัด และไม่เป็นศูนย์
ในรูปแบบทางคณิตศาสตร์กำลังของสัญญาณ x (t) สามารถเขียนเป็น;
$$P = \lim_{T \rightarrow \infty}1/T\int_{-T/2}^{+T/2} x^{2}(t)dt$$ความแตกต่างระหว่างสัญญาณพลังงานและพลังงาน
ตารางต่อไปนี้สรุปความแตกต่างของสัญญาณพลังงานและพลังงาน
| สัญญาณไฟ | สัญญาณพลังงาน |
|---|---|
| สัญญาณระยะปฏิบัติเป็นสัญญาณกำลัง | สัญญาณที่ไม่เป็นระยะคือสัญญาณพลังงาน |
| ที่นี่กำลังเฉลี่ยปกตินั้น จำกัด และไม่เป็นศูนย์ | ที่นี่พลังงานที่ปรับให้เป็นมาตรฐานทั้งหมดมีค่า จำกัด และไม่เป็นศูนย์ |
| ในทางคณิตศาสตร์ $$P = \lim_{T \rightarrow \infty}1/T\int_{-T/2}^{+T/2} x^{2}(t)dt$$ |
ในทางคณิตศาสตร์ $$E = \int_{-\infty}^{+\infty} x^{2}(t)dt$$ |
| การมีอยู่ของสัญญาณเหล่านี้ไม่มีที่สิ้นสุดเมื่อเวลาผ่านไป | สัญญาณเหล่านี้มีอยู่ในช่วงเวลา จำกัด |
| พลังงานของสัญญาณกำลังไม่มีที่สิ้นสุดในช่วงเวลาที่ไม่มีที่สิ้นสุด | พลังของสัญญาณพลังงานเป็นศูนย์ในช่วงเวลาที่ไม่มีที่สิ้นสุด |
ตัวอย่างที่แก้ไข
Example 1 - ค้นหาพลังของสัญญาณ $z(t) = 2\cos(3\Pi t+30^{o})+4\sin(3\Pi +30^{o})$
Solution- สัญญาณทั้งสองข้างต้นมีมุมฉากซึ่งกันและกันเนื่องจากคำศัพท์ความถี่เหมือนกันและมีความแตกต่างเฟสเดียวกัน ดังนั้นพลังทั้งหมดจะเป็นการรวมพลังของแต่ละบุคคล
ปล่อย $z(t) = x(t)+y(t)$
ที่ไหน $x(t) = 2\cos (3\Pi t+30^{o})$ และ $y(t) = 4\sin(3\Pi +30^{o})$
พลังของ $x(t) = \frac{2^{2}}{2} = 2$
พลังของ $y(t) = \frac{4^{2}}{2} = 8$
ดังนั้น, $P(z) = p(x)+p(y) = 2+8 = 10$…ตอบ
Example 2 - ทดสอบว่าได้รับสัญญาณหรือไม่ $x(t) = t^{2}+j\sin t$ คอนจูเกตหรือไม่?
Solution- ตรงนี้ส่วนที่แท้จริงของ t 2คือส่วนที่เป็นคู่และส่วนที่แปลก (ในจินตนาการ)$\sin t$เป็นเรื่องแปลก ดังนั้นสัญญาณข้างต้นจึงเป็นสัญญาณ Conjugate
Example 3 - ตรวจสอบว่า $X(t)= \sin \omega t$ เป็นสัญญาณคี่หรือสัญญาณคู่
Solution - ให้ $X(t) = \sin \omega t$
โดยการย้อนเวลาเราจะได้ $\sin (-\omega t)$
แต่เรารู้ดีว่า $\sin(-\phi) = -\sin \phi$.
ดังนั้น,
$$\sin (-\omega t) = -\sin \omega t$$นี่เป็นเงื่อนไขที่ทำให้สัญญาณเป็นคี่ ดังนั้น,$\sin \omega t$ เป็นสัญญาณคี่
เช่นเดียวกับสัญญาณเวลาแบบต่อเนื่องสัญญาณเวลาแบบไม่ต่อเนื่องสามารถจำแนกได้ตามเงื่อนไขหรือการดำเนินการของสัญญาณ
สัญญาณคู่และคี่
แม้แต่สัญญาณ
สัญญาณจะบอกว่าสม่ำเสมอหรือสมมาตรหากเป็นไปตามเงื่อนไขต่อไปนี้
$$x(-n) = x(n)$$
ที่นี่เราจะเห็นว่า x (-1) = x (1), x (-2) = x (2) และ x (-n) = x (n) ดังนั้นจึงเป็นสัญญาณคู่
สัญญาณแปลก
สัญญาณจะบอกว่าเป็นเลขคี่หากเป็นไปตามเงื่อนไขต่อไปนี้
$$x(-n) = -x(n)$$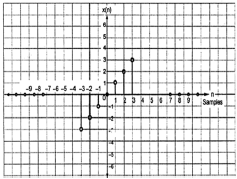
จากรูปจะเห็นว่า x (1) = -x (-1), x (2) = -x (2) และ x (n) = -x (-n) ดังนั้นจึงเป็นสัญญาณที่แปลกและต่อต้านสมมาตร
สัญญาณเป็นระยะและไม่เป็นระยะ
สัญญาณบอกเวลาที่ไม่ต่อเนื่องเป็นช่วง ๆ หากเป็นไปตามเงื่อนไขต่อไปนี้ -
$$x(n+N) = x(n)$$ที่นี่สัญญาณ x (n) ซ้ำตัวเองหลังจากช่วงเวลา N สิ่งนี้สามารถเข้าใจได้ดีที่สุดโดยพิจารณาจากสัญญาณโคไซน์ -
$$x(n) = A \cos(2\pi f_{0}n+\theta)$$ $$x(n+N) = A\cos(2\pi f_{0}(n+N)+\theta) = A\cos(2\pi f_{0}n+2\pi f_{0}N+\theta)$$ $$= A\cos(2\pi f_{0}n+2\pi f_{0}N+\theta)$$เพื่อให้สัญญาณเป็นระยะควรปฏิบัติตามเงื่อนไขต่อไปนี้
$$x(n+N) = x(n)$$ $$\Rightarrow A\cos(2\pi f_{0}n+2\pi f_{0}N+\theta) = A \cos(2\pi f_{0}n+\theta)$$กล่าวคือ $2\pi f_{0}N$ เป็นผลคูณเชิงปริพันธ์ของ $2\pi$
$$2\pi f_{0}N = 2\pi K$$ $$\Rightarrow N = \frac{K}{f_{0}}$$ความถี่ของสัญญาณไซน์ที่ไม่ต่อเนื่องถูกคั่นด้วยอินทิกรัลพหุคูณของ $2\pi$.
สัญญาณพลังงานและพลังงาน
สัญญาณพลังงาน
พลังงานของสัญญาณเวลาไม่ต่อเนื่องแสดงเป็น E ในทางคณิตศาสตร์สามารถเขียนเป็น;
$$E = \displaystyle \sum\limits_{n=-\infty}^{+\infty}|x(n)|^2$$หากแต่ละค่าของ $x(n)$กำลังสองและเพิ่มเราได้รับสัญญาณพลังงาน ที่นี่$x(n)$ คือสัญญาณพลังงานและพลังงานของมันมี จำกัด เมื่อเวลาผ่านไปคือ $ 0 <E <\ infty $
สัญญาณไฟ
กำลังเฉลี่ยของสัญญาณที่ไม่ต่อเนื่องแสดงเป็น P. ในทางคณิตศาสตร์ซึ่งสามารถเขียนเป็น;
$$P = \lim_{N \to \infty} \frac{1}{2N+1}\displaystyle\sum\limits_{n=-N}^{+N} |x(n)|^2$$ที่นี่อำนาจ จำกัด คือ 0 <P <∞ อย่างไรก็ตามมีสัญญาณบางอย่างที่ไม่ใช่สัญญาณประเภทพลังงานหรือพลังงาน
มีสัญญาณอื่น ๆ ซึ่งเป็นผลมาจากการดำเนินการกับพวกเขา สัญญาณทั่วไปบางประเภทจะกล่าวถึงด้านล่าง
สัญญาณผัน
สัญญาณซึ่งเป็นไปตามเงื่อนไข $x(t) = x*(-t)$ เรียกว่าสัญญาณคอนจูเกต
ปล่อย $x(t) = a(t)+jb(t)$... eqn. 1
ดังนั้น, $x(-t) = a(-t)+jb(-t)$
และ $x*(-t) = a(-t)-jb(-t)$... eqn. 2
ตามเงื่อนไข $x(t) = x*(-t)$
หากเราเปรียบเทียบทั้งสมการที่ได้มา 1 และ 2 เราจะเห็นว่าส่วนจริงเป็นเลขคู่ในขณะที่ส่วนจินตภาพเป็นเลขคี่ นี่คือเงื่อนไขสำหรับสัญญาณที่จะเป็นประเภทคอนจูเกต
Conjugate Anti-Symmetric Signals
สัญญาณซึ่งเป็นไปตามเงื่อนไข $x(t) = -x*(-t)$ เรียกว่าสัญญาณต่อต้านสมมาตรคอนจูเกต
ปล่อย $x(t) = a(t)+jb(t)$... eqn. 1
ดังนั้น $x(-t) = a(-t)+jb(-t)$
และ $x*(-t) = a(-t)-jb(-t)$
$-x*(-t) = -a(-t)+jb(-t)$... eqn. 2
ตามเงื่อนไข $x(t) = -x*(-t)$
ทีนี้ลองเปรียบเทียบอีกครั้งทั้งสมการเหมือนกับที่เราทำกับสัญญาณคอนจูเกต ที่นี่เราจะพบว่าส่วนจริงเป็นเลขคี่และส่วนจินตภาพเป็นเลขคู่ นี่เป็นเงื่อนไขสำหรับสัญญาณที่จะกลายเป็นประเภทต่อต้านสมมาตรที่ผันแปร
ตัวอย่าง
ให้สัญญาณที่กำหนด $x(t) = \sin t+jt^{2}$.
นี่คือส่วนที่แท้จริง $\sin t$ เป็นเรื่องแปลกและเป็นส่วนในจินตนาการ $t^2$เป็นคู่ ดังนั้นสัญญาณนี้จึงสามารถจัดเป็นสัญญาณต่อต้านสมมาตรแบบคอนจูเกต
ฟังก์ชันใด ๆ สามารถแบ่งออกเป็นสองส่วน ส่วนหนึ่งเป็นสมมาตรคอนจูเกตและส่วนอื่น ๆ ที่เป็นคอนจูเกตต่อต้านสมมาตร ดังนั้นสัญญาณ x (t) ใด ๆ จึงสามารถเขียนเป็น
$$x(t) = xcs(t)+xcas(t)$$ที่ไหน $xcs(t)$ คือผันสัญญาณสมมาตรและ $xcas(t)$ คือการผันสัญญาณต่อต้านสมมาตร
$$xcs(t) = \frac{[x(t)+x*(-t)]}{2}$$และ
$$xcas(t) = \frac{[x(t)-x*(-t)]}{2}$$สัญญาณสมมาตรครึ่งคลื่น
เมื่อสัญญาณตรงตามเงื่อนไข $cx(t) = -x(t\pm (\frac{T_{0}}{2}))$เรียกว่าสัญญาณสมมาตรครึ่งคลื่น ที่นี่การย้อนกลับแอมพลิจูดและการเปลี่ยนเวลาของสัญญาณจะเกิดขึ้นครึ่งเวลา สำหรับสัญญาณสมมาตรครึ่งคลื่นค่าเฉลี่ยจะเป็นศูนย์ แต่ไม่ใช่กรณีนี้เมื่อสถานการณ์กลับกัน
พิจารณาสัญญาณ x (t) ดังแสดงในรูป A ด้านบน ขั้นตอนแรกคือการเปลี่ยนเวลาของสัญญาณและทำให้มัน$x[t-(\frac{T}{2})]$. ดังนั้นสัญญาณใหม่จึงเปลี่ยนไปดังแสดงในรูป B ถัดไปเรากลับแอมพลิจูดของสัญญาณนั่นคือทำให้มัน$-x[t-(\frac{T}{2})]$ ดังแสดงในรูป C. เนื่องจากสัญญาณนี้จะเกิดขึ้นซ้ำ ๆ หลังจากการขยับครึ่งเวลาและการกลับแอมพลิจูดซึ่งเป็นสัญญาณสมมาตรครึ่งคลื่น
สัญญาณมุมฉาก
สัญญาณสองตัว x (t) และ y (t) ถูกกล่าวว่าตั้งฉากกันหากเป็นไปตามเงื่อนไขสองข้อต่อไปนี้
Condition 1 - $\int_{-\infty}^{\infty}x(t)y(t) = 0$ [สำหรับสัญญาณที่ไม่เป็นระยะ]
Condition 2 - $\int x(t)y(t) = 0$ [สำหรับสัญญาณเป็นระยะ]
สัญญาณซึ่งมีฮาร์มอนิกแปลก ๆ (3 rd , 5 th , 7 th ... ฯลฯ ) และมีความถี่ที่แตกต่างกันมีมุมฉากซึ่งกันและกัน
ในสัญญาณประเภทตรีโกณมิติฟังก์ชันไซน์และฟังก์ชันโคไซน์จะตั้งฉากกันด้วยเช่นกัน หากมีความถี่เท่ากันและอยู่ในเฟสเดียวกัน ในลักษณะเดียวกันสัญญาณ DC (สัญญาณกระแสตรง) และสัญญาณไซน์จะตั้งฉากกัน ถ้า x (t) และ y (t) เป็นสองสัญญาณที่ตั้งฉากกันและ$z(t) = x(t)+y(t)$ จากนั้นกำลังและพลังงานของ z (t) สามารถเขียนเป็น;
$$P(z) = p(x)+p(y)$$ $$E(z) = E(x)+E(y)$$ตัวอย่าง
วิเคราะห์สัญญาณ: $z(t) = 3+4\sin(2\pi t+30^0)$
ในที่นี้สัญญาณประกอบด้วยสัญญาณ DC (3) และฟังก์ชันไซน์หนึ่งฟังก์ชัน ดังนั้นโดยคุณสมบัติสัญญาณนี้จึงเป็นสัญญาณมุมฉากและสัญญาณย่อยทั้งสองในนั้นมีมุมฉากซึ่งกันและกัน
การขยับหมายถึงการเคลื่อนที่ของสัญญาณทั้งในโดเมนเวลา (รอบแกน Y) หรือในโดเมนแอมพลิจูด (รอบแกน X) ดังนั้นเราสามารถแบ่งประเภทของการขยับออกเป็นสองประเภทที่เรียกว่าการเปลี่ยนเวลาและการขยับแอมพลิจูดซึ่งจะกล่าวถึงต่อไปด้านล่าง
การเปลี่ยนเวลา
การเปลี่ยนเวลาหมายถึงการเปลี่ยนสัญญาณในโดเมนเวลา ในทางคณิตศาสตร์สามารถเขียนเป็น
$$x(t) \rightarrow y(t+k)$$ค่า K นี้อาจเป็นบวกหรืออาจเป็นลบ ตามสัญลักษณ์ของค่า k เรามีการขยับสองประเภทที่เรียกว่าการขยับขวาและการขยับซ้าย
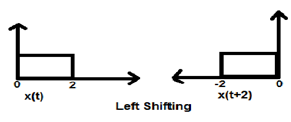
กรณีที่ 1 (K> 0)
เมื่อ K มากกว่าศูนย์การขยับของสัญญาณจะเกิดขึ้นไปทาง "ซ้าย" ในโดเมนเวลา ดังนั้นการเปลี่ยนประเภทนี้จึงเรียกว่าการขยับซ้ายของสัญญาณ
Example
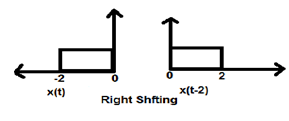
กรณีที่ 2 (K <0)
เมื่อ K น้อยกว่าศูนย์การเปลี่ยนสัญญาณจะเกิดขึ้นไปทางขวาในโดเมนเวลา ดังนั้นการเปลี่ยนประเภทนี้จึงเรียกว่าการขยับขวา
Example
รูปด้านล่างแสดงการเปลี่ยนสัญญาณอย่างถูกต้องโดย 2
การขยับแอมพลิจูด
การเปลี่ยนแอมพลิจูดหมายถึงการเปลี่ยนสัญญาณในโดเมนแอมพลิจูด (รอบแกน X) ในทางคณิตศาสตร์สามารถแสดงเป็น -
$$x(t) \rightarrow x(t)+K$$ค่า K นี้อาจเป็นบวกหรือลบ ดังนั้นเราจึงมีการเปลี่ยนแอมพลิจูดสองประเภทซึ่งจะกล่าวถึงต่อไปด้านล่าง
กรณีที่ 1 (K> 0)
เมื่อ K มีค่ามากกว่าศูนย์การขยับของสัญญาณจะเกิดขึ้นในแกน x ดังนั้นการขยับประเภทนี้จึงเรียกว่าการขยับขึ้น
Example
ให้เราพิจารณาสัญญาณ x (t) ซึ่งได้รับเป็น;
$$x = \begin{cases}0, & t < 0\\1, & 0\leq t\leq 2\\ 0, & t>0\end{cases}$$ให้เรานำ K = + 1 เพื่อให้สัญญาณใหม่สามารถเขียนเป็น -
$y(t) \rightarrow x(t)+1$ ดังนั้นในที่สุด y (t) สามารถเขียนเป็น;
$$x(t) = \begin{cases}1, & t < 0\\2, & 0\leq t\leq 2\\ 1, & t>0\end{cases}$$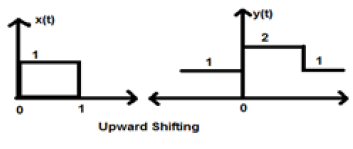
กรณีที่ 2 (K <0)
เมื่อ K น้อยกว่าศูนย์การขยับของสัญญาณจะเกิดขึ้นไปด้านล่างในแกน X- ดังนั้นจึงเรียกว่าการขยับลงของสัญญาณ
Example
ให้เราพิจารณาสัญญาณ x (t) ซึ่งได้รับเป็น;
$$x(t) = \begin{cases}0, & t < 0\\1, & 0\leq t\leq 2\\ 0, & t>0\end{cases}$$ให้เรานำ K = -1 เพื่อให้สัญญาณใหม่สามารถเขียนเป็น;
$y(t)\rightarrow x(t)-1$ ดังนั้นในที่สุด y (t) สามารถเขียนเป็น;
$$y(t) = \begin{cases}-1, & t < 0\\0, & 0\leq t\leq 2\\ -1, & t>0\end{cases}$$
การสเกลของสัญญาณหมายถึงค่าคงที่จะคูณกับเวลาหรือแอมพลิจูดของสัญญาณ
การปรับเวลา
ถ้าค่าคงที่คูณกับแกนเวลาจะเรียกว่าการปรับเวลา สิ่งนี้สามารถแทนค่าทางคณิตศาสตร์เป็น;
$x(t) \rightarrow y(t) = x(\alpha t)$ หรือ $x(\frac{t}{\alpha})$; โดยที่α≠ 0
ดังนั้นแกน y เหมือนกันขนาดแกน x จะลดลงหรือเพิ่มขึ้นตามสัญลักษณ์ของค่าคงที่ (ไม่ว่าจะเป็นบวกหรือลบ) ดังนั้นการปรับขนาดจึงสามารถแบ่งออกเป็นสองประเภทตามที่กล่าวไว้ด้านล่าง
การบีบอัดเวลา
เมื่อใดก็ตามที่อัลฟามีค่ามากกว่าศูนย์แอมพลิจูดของสัญญาณจะถูกหารด้วยอัลฟาในขณะที่ค่าของแกน Y ยังคงเท่าเดิม ซึ่งเรียกว่าการบีบอัดเวลา
Example
ให้เราพิจารณาสัญญาณ x (t) ซึ่งแสดงดังรูปด้านล่าง ให้เราหาค่าของอัลฟ่าเป็น 2 ดังนั้น y (t) จะเป็น x (2t) ซึ่งแสดงในรูปที่กำหนด

เห็นได้ชัดจากตัวเลขด้านบนว่าขนาดเวลาในแกน y ยังคงเท่าเดิม แต่แอมพลิจูดในแกน x ลดลงจาก 4 เป็น 2 ดังนั้นจึงเป็นกรณีของการบีบอัดเวลา
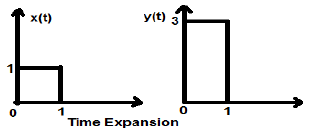
การขยายเวลา
เมื่อเวลาถูกหารด้วยอัลฟ่าคงที่ขนาดแกน Y ของสัญญาณจะได้รับคูณอัลฟาคูณโดยรักษาขนาดแกน X ตามที่เป็นอยู่ ดังนั้นจึงเรียกว่าสัญญาณประเภทการขยายเวลา
Example
ให้เราพิจารณาสัญญาณกำลังสอง x (t) ขนาด 1 เมื่อเราปรับขนาดมันด้วยค่าคงที่ 3 เช่นนั้น $x(t) \rightarrow y(t) \rightarrow x(\frac{t}{3})$จากนั้นแอมพลิจูดของสัญญาณจะถูกแก้ไข 3 ครั้งซึ่งแสดงในรูปด้านล่าง
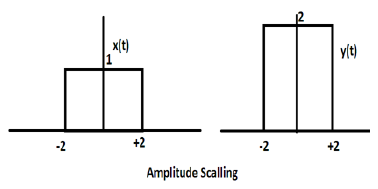
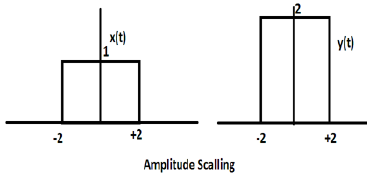
การปรับขนาดความกว้าง
การคูณค่าคงที่ด้วยแอมพลิจูดของสัญญาณทำให้เกิดการปรับขนาดแอมพลิจูด ขึ้นอยู่กับสัญลักษณ์ของค่าคงที่อาจเป็นได้ทั้งการปรับขนาดแอมพลิจูดหรือการลดทอน ให้เราพิจารณาสัญญาณคลื่นสี่เหลี่ยม x (t) = Π (t / 4)
สมมติว่าเรากำหนดฟังก์ชันอื่น y (t) = 2 Π (t / 4) ในกรณีนี้ค่าของแกน y จะเพิ่มเป็นสองเท่าโดยคงค่าแกนเวลาไว้ตามเดิม ดังแสดงในรูปด้านล่าง
พิจารณาฟังก์ชันคลื่นสี่เหลี่ยมอื่นที่กำหนดเป็น z (t) โดยที่ z (t) = 0.5 Π (t / 4) ในที่นี้แอมพลิจูดของฟังก์ชัน z (t) จะเป็นครึ่งหนึ่งของ x (t) คือแกนเวลายังคงเท่าเดิมแกนแอมพลิจูดจะลดลงครึ่งหนึ่ง นี่คือภาพประกอบที่แสดงด้านล่าง
เมื่อใดก็ตามที่เวลาในสัญญาณคูณด้วย -1 สัญญาณจะกลับกัน สร้างภาพสะท้อนเกี่ยวกับแกน Y หรือ X สิ่งนี้เรียกว่าการกลับรายการของสัญญาณ
การกลับรายการสามารถแบ่งออกเป็นสองประเภทตามเงื่อนไขว่าเวลาหรือแอมพลิจูดของสัญญาณจะคูณด้วย -1
การย้อนเวลา
เมื่อใดก็ตามที่เวลาของสัญญาณคูณด้วย -1 จะเรียกว่าการย้อนเวลาของสัญญาณ ในกรณีนี้สัญญาณจะสร้างภาพสะท้อนเกี่ยวกับแกน Y ในทางคณิตศาสตร์สามารถเขียนเป็น;
$$x(t) \rightarrow y(t) \rightarrow x(-t)$$สิ่งนี้สามารถเข้าใจได้ดีที่สุดจากตัวอย่างต่อไปนี้

จากตัวอย่างข้างต้นเราจะเห็นได้อย่างชัดเจนว่าสัญญาณกลับกันเกี่ยวกับแกน Y ดังนั้นจึงเป็นการปรับเวลาแบบหนึ่งเช่นกัน แต่ที่นี่ปริมาณมาตราส่วนคือ (-1) เสมอ
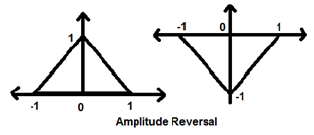
การกลับแอมพลิจูด
เมื่อใดก็ตามที่ความกว้างของสัญญาณคูณด้วย -1 จะเรียกว่าการกลับกันของแอมพลิจูด ในกรณีนี้สัญญาณจะสร้างภาพสะท้อนเกี่ยวกับแกน X ในทางคณิตศาสตร์สามารถเขียนเป็น;
$$x(t)\rightarrow y(t)\rightarrow -x(t)$$ลองพิจารณาตัวอย่างต่อไปนี้ การกลับแอมพลิจูดสามารถมองเห็นได้ชัดเจน
การดำเนินการที่สำคัญสองอย่างที่ดำเนินการกับสัญญาณคือการสร้างความแตกต่างและการรวม
ความแตกต่าง
ความแตกต่างของสัญญาณใด ๆ x (t) หมายถึงการแสดงความชันของสัญญาณนั้นตามเวลา ในทางคณิตศาสตร์จะแสดงเป็น;
$$x(t)\rightarrow \frac{dx(t)}{dt}$$ในกรณีของการสร้างความแตกต่างของ OPAMP วิธีการนี้มีประโยชน์มาก เราสามารถแยกความแตกต่างของสัญญาณในรูปแบบกราฟิกได้อย่างง่ายดายแทนที่จะใช้สูตร อย่างไรก็ตามเงื่อนไขคือสัญญาณต้องเป็นแบบสี่เหลี่ยมหรือสามเหลี่ยมซึ่งส่วนใหญ่จะเกิดขึ้น
| สัญญาณดั้งเดิม | สัญญาณที่แตกต่าง |
|---|---|
| ทางลาด | ขั้นตอน |
| ขั้นตอน | แรงกระตุ้น |
| แรงกระตุ้น | 1 |
ตารางด้านบนแสดงให้เห็นถึงสภาพของสัญญาณหลังจากที่มีความแตกต่าง ตัวอย่างเช่นสัญญาณทางลาดจะแปลงเป็นสัญญาณขั้นตอนหลังจากการแยกความแตกต่าง ในทำนองเดียวกันสัญญาณขั้นตอนของหน่วยจะกลายเป็นสัญญาณอิมพัลส์
ตัวอย่าง
ให้สัญญาณที่ให้กับเราเป็น $x(t) = 4[r(t)-r(t-2)]$. เมื่อมีการลงจุดสัญญาณนี้จะมีลักษณะเหมือนสัญญาณทางด้านซ้ายของรูปด้านล่าง ตอนนี้เป้าหมายของเราคือการแยกสัญญาณที่กำหนด
เริ่มต้นด้วยเราจะเริ่มแยกความแตกต่างของสมการที่กำหนด เรารู้ว่าสัญญาณทางลาดหลังจากการแยกความแตกต่างให้สัญญาณขั้นตอนของหน่วย
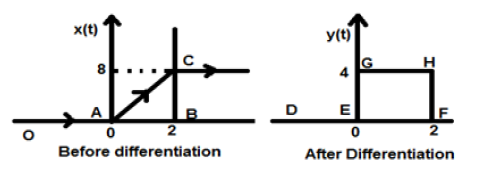
ดังนั้นสัญญาณผลลัพธ์ของเรา y (t) สามารถเขียนเป็น;
$y(t) = \frac{dx(t)}{dt}$
$= \frac{d4[r(t)-r(t-2)]}{dt}$
$= 4[u(t)-u(t-2)]$
ตอนนี้สัญญาณนี้ถูกพล็อตในที่สุดซึ่งแสดงไว้ที่ด้านขวามือของรูปด้านบน
การรวมสัญญาณใด ๆ หมายถึงการรวมของสัญญาณนั้นภายใต้โดเมนเวลาเฉพาะเพื่อให้ได้สัญญาณที่แก้ไข ในทางคณิตศาสตร์สามารถแสดงเป็น -
$$x(t)\rightarrow y(t) = \int_{-\infty}^{t}x(t)dt$$นอกจากนี้ในกรณีส่วนใหญ่เราสามารถทำการรวมทางคณิตศาสตร์และค้นหาสัญญาณที่ได้ แต่การรวมโดยตรงแบบต่อเนื่องอย่างรวดเร็วเป็นไปได้สำหรับสัญญาณที่แสดงในรูปแบบกราฟิกสี่เหลี่ยม เช่นเดียวกับการสร้างความแตกต่างที่นี่เราจะอ้างอิงตารางเพื่อให้ได้ผลลัพธ์อย่างรวดเร็ว
| สัญญาณดั้งเดิม | สัญญาณรวม |
|---|---|
| 1 | แรงกระตุ้น |
| แรงกระตุ้น | ขั้นตอน |
| ขั้นตอน | ทางลาด |
ตัวอย่าง
ให้เราพิจารณาสัญญาณ $x(t) = u(t)-u(t-3)$. ดังแสดงในรูปที่ 1 ด้านล่าง ชัดเจนเราจะเห็นว่ามันเป็นสัญญาณขั้นตอน ตอนนี้เราจะรวมเข้าด้วยกัน จากตารางเราทราบว่าการรวมสัญญาณขั้นตอนทำให้เกิดสัญญาณทางลาด
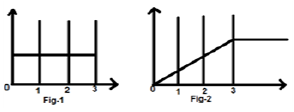
อย่างไรก็ตามเราจะคำนวณทางคณิตศาสตร์
$y(t) = \int_{-\infty}^{t}x(t)dt$
$= \int_{-\infty}^{t}[u(t)-u(t-3)]dt$
$= \int_{-\infty}^{t}u(t)dt-\int_{-\infty}^{t}u(t-3)dt$
$= r(t)-r(t-3)$
พล็อตเช่นเดียวกันดังแสดงในรูปที่ 2
การแปลงสัญญาณสองสัญญาณในโดเมนเวลาเทียบเท่ากับการคูณของการแทนค่าในโดเมนความถี่ ในทางคณิตศาสตร์เราสามารถเขียนการแปลงสัญญาณสองสัญญาณเป็น
$$y(t) = x_{1}(t)*x_{2}(t)$$ $$= \int_{-\infty}^{\infty}x_{1}(p).x_{2}(t-p)dp$$ขั้นตอนในการ Convolution
- รับสัญญาณ x 1 (t) และใส่ t = p ที่นั่นเพื่อให้เป็น x 1 (p)
- รับสัญญาณ x 2 (t) และทำขั้นตอนที่ 1 และทำให้เป็น x 2 (p)
- ทำการพับสัญญาณคือ x 2 (-p)
- ทำการเปลี่ยนเวลาของสัญญาณข้างต้น x 2 [- (pt)]
- จากนั้นทำการคูณของสัญญาณทั้งสอง กล่าวคือ$x_{1}(p).x_{2}[−(p−t)]$
ตัวอย่าง
ให้เราทำการแปลงสัญญาณขั้นตอน u (t) ด้วยชนิดของมันเอง
$y(t) = u(t)*u(t)$
$= \int_{-\infty}^{\infty}[u(p).u[-(p-t)]dp$
ตอนนี้ t นี้สามารถมากกว่าหรือน้อยกว่าศูนย์ซึ่งแสดงในรูปด้านล่าง
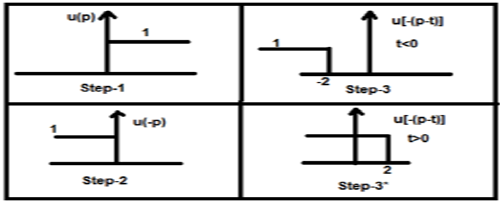
ดังนั้นจากกรณีข้างต้นผลลัพธ์จึงเกิดขึ้นตามความเป็นไปได้ดังต่อไปนี้
$y(t) = \begin{cases}0, & if\quad t<0\\\int_{0}^{t}1dt, & for\quad t>0\end{cases}$
$= \begin{cases}0, & if\quad t<0\\t, & t>0\end{cases} = r(t)$
คุณสมบัติของ Convolution
สับเปลี่ยน
มันระบุว่าลำดับการแปลงไม่สำคัญซึ่งสามารถแสดงทางคณิตศาสตร์เป็น
$$x_{1}(t)*x_{2}(t) = x_{2}(t)*x_{1}(t)$$Associative
มันระบุว่าลำดับของการสนทนาที่เกี่ยวข้องกับสัญญาณสามอย่างอาจเป็นอะไรก็ได้ ในทางคณิตศาสตร์สามารถแสดงเป็น;
$$x_{1}(t)*[x_{2}(t)*x_{3}(t)] = [x_{1}(t)*x_{2}(t)]*x_{3}(t)$$แจกจ่าย
สามารถเพิ่มสัญญาณสองสัญญาณก่อนจากนั้นจึงสามารถแปลงสัญญาณเป็นสัญญาณที่สามได้ สิ่งนี้เทียบเท่ากับการแปลงสัญญาณสองสัญญาณทีละสัญญาณกับสัญญาณที่สามและเพิ่มในที่สุด ในทางคณิตศาสตร์สามารถเขียนเป็น;
$$x_{1}(t)*[x_{2}(t)+x_{3}(t)] = [x_{1}(t)*x_{2}(t)+x_{1}(t)*x_{3}(t)]$$พื้นที่
หากสัญญาณเป็นผลมาจากการแปลงสัญญาณสองสัญญาณพื้นที่ของสัญญาณจะเป็นการคูณของสัญญาณแต่ละตัว ในทางคณิตศาสตร์สามารถเขียนได้
ถ้า $y(t) = x_{1}*x_{2}(t)$
จากนั้นพื้นที่ของ y (t) = พื้นที่ของ x 1 (t) X พื้นที่ของ x 2 (t)
การปรับขนาด
หากสัญญาณสองสัญญาณถูกปรับขนาดเป็นค่าคงที่ที่ไม่รู้จัก“ a” และการ Convolution เสร็จสิ้นสัญญาณผลลัพธ์จะถูกแปลงเป็นค่าคงที่“ a” เดียวกันและจะถูกหารด้วยปริมาณดังที่แสดงด้านล่าง
ถ้า, $x_{1}(t)*x_{2}(t) = y(t)$
จากนั้น $x_{1}(at)*x_{2}(at) = \frac{y(at)}{a}, a \ne 0$
ล่าช้า
สมมติว่าสัญญาณ y (t) เป็นผลมาจากการแปลงสัญญาณสองสัญญาณ x1 (t) และ x2 (t) หากสัญญาณทั้งสองล่าช้าตามเวลา t1 และ t2 ตามลำดับสัญญาณผลลัพธ์ y (t) จะล่าช้าโดย (t1 + t2) ในทางคณิตศาสตร์สามารถเขียนเป็น -
ถ้า, $x_{1}(t)*x_{2}(t) = y(t)$
จากนั้น $x_{1}(t-t_{1})*x_{2}(t-t_{2}) = y[t-(t_{1}+t_{2})]$
ตัวอย่างที่แก้ไข
Example 1 - ค้นหาการแปลงสัญญาณ u (t-1) และ u (t-2)
Solution- สัญญาณที่ให้คือ u (t-1) และ u (t-2) การสนทนาของพวกเขาสามารถทำได้ดังที่แสดงด้านล่าง -
$y(t) = u(t-1)*u(t-2)$
$y(t) = \int_{-\infty}^{+\infty}[u(t-1).u(t-2)]dt$
$= r(t-1)+r(t-2)$
$= r(t-3)$
Example 2 - ค้นหาการแปลงสัญญาณสองสัญญาณที่กำหนดโดย
$x_{1}(n) = \lbrace 3,-2, 2\rbrace $
$x_{2}(n) = \begin{cases}2, & 0\leq n\leq 4\\0, & x > elsewhere\end{cases}$
Solution -
x 2 (n) สามารถถอดรหัสเป็น$x_{2}(n) = \lbrace 2,2,2,2,2\rbrace Originalfirst$
ให้ x 1 (n) ก่อนหน้านี้$= \lbrace 3,-2,3\rbrace = 3-2Z^{-1}+2Z^{-2}$
ในทำนองเดียวกัน $x_{2}(z) = 2+2Z^{-1}+2Z^{-2}+2Z^{-3}+2Z^{-4}$
สัญญาณผลลัพธ์
$X(Z) = X_{1}(Z)X_{2}(z)$
$= \lbrace 3-2Z^{-1}+2Z^{-2}\rbrace \times \lbrace 2+2Z^{-1}+2Z^{-2}+2Z^{-3}+2Z^{-4}\rbrace$
$= 6+2Z^{-1}+6Z^{-2}+6Z^{-3}+6Z^{-4}+6Z^{-5}$
การแปลง Z แบบผกผันข้างต้นเราจะได้รับสัญญาณผลลัพธ์เป็น
$x(n) = \lbrace 6,2,6,6,6,0,4\rbrace$ ต้นกำเนิดที่หนึ่ง
Example 3 - กำหนด Convolution ของ 2 สัญญาณต่อไปนี้ -
$x(n) = \lbrace 2,1,0,1\rbrace$
$h(n) = \lbrace 1,2,3,1\rbrace$
Solution -
เราได้รับการแปลงสัญญาณ Z
$x(z) = 2+2Z^{-1}+2Z^{-3}$
และ $h(n) = 1+2Z^{-1}+3Z^{-2}+Z^{-3}$
ตอนนี้การแปลงสัญญาณสองสัญญาณหมายถึงการคูณการแปลง Z ของพวกเขา
นั่นคือ $Y(Z) = X(Z) \times h(Z)$
$= \lbrace 2+2Z^{-1}+2Z^{-3}\rbrace \times \lbrace 1+2Z^{-1}+3Z^{-2}+Z^{-3}\rbrace$
$= \lbrace 2+5Z^{-1}+8Z^{-2}+6Z^{-3}+3Z^{-4}+3Z^{-5}+Z^{-6}\rbrace$
การแปลง Z แบบผกผันสัญญาณผลลัพธ์สามารถเขียนเป็น;
$y(n) = \lbrace 2,5,8,6,6,1 \rbrace Originalfirst$
บางระบบมีข้อเสนอแนะและบางระบบไม่มี สิ่งเหล่านี้ซึ่งไม่มีระบบป้อนกลับผลลัพธ์จะขึ้นอยู่กับค่าปัจจุบันของอินพุตเท่านั้น ไม่มีมูลค่าในอดีตของข้อมูลในขณะนั้น ระบบประเภทนี้เรียกว่าระบบคงที่ มันไม่ได้ขึ้นอยู่กับมูลค่าในอนาคตด้วย
เนื่องจากระบบเหล่านี้ไม่มีการบันทึกในอดีตดังนั้นจึงไม่มีหน่วยความจำใด ๆ ดังนั้นเราจึงกล่าวว่าระบบคงที่ทั้งหมดเป็นระบบที่ไม่มีหน่วยความจำ ให้เราเป็นตัวอย่างเพื่อทำความเข้าใจแนวคิดนี้ให้ดียิ่งขึ้น
ตัวอย่าง
ให้เราตรวจสอบว่าระบบต่อไปนี้เป็นระบบคงที่หรือไม่
- $y(t) = x(t)+x(t-1)$
- $y(t) = x(2t)$
- $y(t) = x = \sin [x(t)]$
ก) $y(t) = x(t)+x(t-1)$
ในที่นี้ x (t) คือมูลค่าปัจจุบัน ไม่มีความสัมพันธ์กับค่าที่ผ่านมาของเวลา ดังนั้นจึงเป็นระบบคงที่ อย่างไรก็ตามในกรณีของ x (t-1) ถ้าเราใส่ t = 0 มันจะลดเป็น x (-1) ซึ่งขึ้นอยู่กับค่าที่ผ่านมา ดังนั้นจึงไม่คงที่ ดังนั้นที่นี่ y (t) ไม่ใช่ระบบคงที่
ข) $y(t) = x(2t)$
ถ้าเราแทนที่ t = 2 ผลลัพธ์จะเป็น y (t) = x (4) อีกครั้งขึ้นอยู่กับมูลค่าในอนาคต ดังนั้นจึงไม่ใช่ระบบคงที่
ค) $y(t) = x = \sin [x(t)]$
ในนิพจน์นี้เรากำลังจัดการกับฟังก์ชันไซน์ ช่วงของฟังก์ชันไซน์อยู่ระหว่าง -1 ถึง +1 ดังนั้นค่าใดก็ตามที่เราแทนที่ด้วย x (t) เราจะได้ระหว่าง -1 ถึง +1 ดังนั้นเราสามารถพูดได้ว่ามันไม่ได้ขึ้นอยู่กับคุณค่าในอดีตหรืออนาคตใด ๆ ดังนั้นจึงเป็นระบบคงที่
จากตัวอย่างข้างต้นเราสามารถสรุปได้ดังนี้ -
- ระบบใด ๆ ที่มีการเปลี่ยนเวลาไม่คงที่
- ระบบใด ๆ ที่มีการเปลี่ยนแอมพลิจูดก็ไม่คงที่เช่นกัน
- กรณีการรวมและการสร้างความแตกต่างก็ไม่คงที่เช่นกัน
หากระบบขึ้นอยู่กับค่าในอดีตและอนาคตของสัญญาณในช่วงเวลาใดเวลาหนึ่งระบบจะเรียกว่าระบบไดนามิก ซึ่งแตกต่างจากระบบคงที่สิ่งเหล่านี้ไม่ใช่ระบบที่มีหน่วยความจำน้อยกว่า พวกเขาเก็บค่าในอดีตและอนาคต ดังนั้นพวกเขาต้องการหน่วยความจำบางอย่าง ให้เราเข้าใจทฤษฎีนี้ดีขึ้นผ่านตัวอย่างบางส่วน
ตัวอย่าง
ค้นหาว่าระบบต่อไปนี้เป็นแบบไดนามิกหรือไม่
a) $y(t) = x(t+1)$
ในกรณีนี้ถ้าเราใส่ t = 1 ในสมการมันจะถูกแปลงเป็น x (2) ซึ่งเป็นค่าตามอนาคต เนื่องจากที่นี่เราให้อินพุตเป็น 1 แต่กำลังแสดงค่าสำหรับ x (2) เนื่องจากเป็นสัญญาณที่ต้องพึ่งพาในอนาคตจึงเห็นได้ชัดว่าเป็นระบบไดนามิก
b) $y(t) = Real[x(t)]$
$$= \frac{[x(t)+x(t)^*]}{2}$$ในกรณีนี้ค่าใดก็ตามที่เราใส่ไว้จะแสดงสัญญาณมูลค่าจริงตามเวลานั้น ไม่มีการพึ่งพาคุณค่าในอนาคตหรือในอดีต ดังนั้นจึงไม่ใช่ระบบไดนามิก แต่เป็นระบบคงที่
c) $y(t) = Even[x(t)]$
$$= \frac{[x(t)+x(-t)]}{2}$$ที่นี่ถ้าเราจะแทนที่ t = 1 สัญญาณหนึ่งจะแสดง x (1) และอีกสัญญาณหนึ่งจะแสดง x (-1) ซึ่งเป็นค่าที่ผ่านมา ในทำนองเดียวกันถ้าเราใส่ t = -1 สัญญาณหนึ่งจะแสดง x (-1) และอีกสัญญาณหนึ่งจะแสดง x (1) ซึ่งเป็นค่าในอนาคต ดังนั้นชัดเจนว่าเป็นกรณีของระบบไดนามิก
d) $y(t) = \cos [x(t)]$
ในกรณีนี้เนื่องจากระบบเป็นฟังก์ชันโคไซน์จึงมีโดเมนค่าหนึ่งซึ่งอยู่ระหว่าง -1 ถึง +1 ดังนั้นค่าใดก็ตามที่เราใส่เราจะได้ผลลัพธ์ภายในขีด จำกัด ที่กำหนด ดังนั้นจึงเป็นระบบคงที่
จากตัวอย่างข้างต้นเราสามารถสรุปได้ดังนี้ -
- สัญญาณกรณีการเปลี่ยนเวลาทั้งหมดเป็นสัญญาณแบบไดนามิก
- ในกรณีของการปรับขนาดเวลาสัญญาณทั้งหมดเป็นสัญญาณไดนามิก
- สัญญาณกรณีการรวมเป็นสัญญาณแบบไดนามิก
ก่อนหน้านี้เราเห็นว่าระบบจำเป็นต้องเป็นอิสระจากอนาคตและค่าในอดีตเพื่อให้เป็นแบบคงที่ ในกรณีนี้สภาพเกือบจะเหมือนเดิมโดยมีการปรับเปลี่ยนเพียงเล็กน้อย ที่นี่เพื่อให้ระบบเป็นเหตุเป็นผลควรเป็นอิสระจากค่าในอนาคตเท่านั้น นั่นหมายความว่าการพึ่งพาในอดีตจะทำให้ระบบไม่กลายเป็นสาเหตุ
ระบบสาเหตุเป็นระบบที่สามารถทำได้จริงหรือในทางกายภาพ ให้เราพิจารณาตัวอย่างบางส่วนเพื่อทำความเข้าใจสิ่งนี้ให้ดีขึ้น
ตัวอย่าง
ให้เราพิจารณาสัญญาณต่อไปนี้
a) $y(t) = x(t)$
ที่นี่สัญญาณขึ้นอยู่กับค่าปัจจุบันของ x เท่านั้น ตัวอย่างเช่นถ้าเราแทนที่ t = 3 ผลลัพธ์จะแสดงเฉพาะช่วงเวลานั้นเท่านั้น ดังนั้นเนื่องจากไม่มีการพึ่งพามูลค่าในอนาคตเราจึงเรียกมันว่าระบบสาเหตุ
b) $y(t) = x(t-1)$
ที่นี่ระบบขึ้นอยู่กับค่าในอดีต ตัวอย่างเช่นถ้าเราแทนที่ t = 3 นิพจน์จะลดเป็น x (2) ซึ่งเป็นค่าที่ผ่านมาเทียบกับอินพุตของเรา ไม่ว่าจะขึ้นอยู่กับมูลค่าในอนาคต ดังนั้นระบบนี้จึงเป็นระบบเชิงสาเหตุด้วย
c) $y(t) = x(t)+x(t+1)$
ในกรณีนี้ระบบมีสองส่วน ส่วน x (t) ตามที่เราได้กล่าวไปก่อนหน้านี้ขึ้นอยู่กับค่าปัจจุบันเท่านั้น ดังนั้นไม่มีปัญหากับมัน อย่างไรก็ตามถ้าเราใช้กรณีของ x (t + 1) มันขึ้นอยู่กับค่าในอนาคตอย่างชัดเจนเพราะถ้าเราใส่ t = 1 นิพจน์จะลดเป็น x (2) ซึ่งเป็นค่าในอนาคต ดังนั้นจึงไม่ใช่สาเหตุ
ระบบที่ไม่ใช่สาเหตุนั้นตรงข้ามกับระบบสาเหตุ หากระบบขึ้นอยู่กับค่าในอนาคตของอินพุตในช่วงเวลาใดเวลาหนึ่งระบบจะกล่าวว่าเป็นระบบที่ไม่ใช่สาเหตุ
ตัวอย่าง
ให้เราใช้ตัวอย่างและพยายามทำความเข้าใจในทางที่ดีขึ้น
a) $y(t) = x(t+1)$
เราได้พูดถึงระบบนี้แล้วในระบบเชิงสาเหตุด้วย สำหรับอินพุตใด ๆ ระบบจะลดมูลค่าของระบบในอนาคต ตัวอย่างเช่นถ้าเราใส่ t = 2 มันจะลดเป็น x (3) ซึ่งเป็นค่าในอนาคต ดังนั้นระบบจึงไม่ใช่สาเหตุ
b) $y(t) = x(t)+x(t+2)$
ในกรณีนี้ x (t) เป็นฟังก์ชันที่ขึ้นกับมูลค่าปัจจุบันเท่านั้น เราได้พูดคุยกันแล้วว่าฟังก์ชัน x (t + 2) ขึ้นอยู่กับอนาคตเพราะสำหรับ t = 3 จะให้ค่าสำหรับ x (5) ดังนั้นจึงไม่ใช่สาเหตุ
c) $y(t) = x(t-1)+x(t)$
ในระบบนี้ขึ้นอยู่กับค่าปัจจุบันและในอดีตของอินพุตที่กำหนด ไม่ว่าเราจะทดแทนค่าอะไรก็ตามมันจะไม่แสดงการพึ่งพาในอนาคต เห็นได้ชัดว่ามันไม่ใช่ระบบที่ไม่ใช่สาเหตุ ค่อนข้างเป็นระบบสาเหตุ
ระบบต่อต้านสาเหตุเป็นเพียงเวอร์ชันที่แก้ไขเล็กน้อยของระบบที่ไม่ใช่สาเหตุ ระบบขึ้นอยู่กับค่าในอนาคตของอินพุตเท่านั้น ไม่มีการพึ่งพาทั้งในปัจจุบันหรือค่าในอดีต
ตัวอย่าง
ค้นหาว่าระบบต่อไปนี้ต่อต้านสาเหตุหรือไม่
a) $y(t) = x(t)+x(t-1)$
ระบบมีฟังก์ชันย่อยสองฟังก์ชัน ฟังก์ชันย่อยหนึ่งฟังก์ชัน x (t + 1) ขึ้นอยู่กับค่าในอนาคตของอินพุต แต่ฟังก์ชันย่อยอื่น x (t) ขึ้นอยู่กับปัจจุบันเท่านั้น เนื่องจากระบบขึ้นอยู่กับมูลค่าปัจจุบันนอกเหนือจากมูลค่าในอนาคตระบบนี้จึงไม่ได้ต่อต้านสาเหตุ
b) $y(t) = x(t+3)$
ถ้าเราวิเคราะห์ระบบข้างต้นเราจะเห็นว่าระบบขึ้นอยู่กับค่าในอนาคตของระบบเท่านั้นคือถ้าเราใส่ t = 0 มันจะลดเป็น x (3) ซึ่งเป็นค่าในอนาคต ระบบนี้เป็นตัวอย่างที่สมบูรณ์แบบของระบบต่อต้านสาเหตุ
ระบบเชิงเส้นเป็นไปตามกฎของการซ้อนทับ กฎหมายนี้เป็นเงื่อนไขที่จำเป็นและเพียงพอในการพิสูจน์ความเป็นเชิงเส้นของระบบ นอกเหนือจากนี้ระบบยังรวมกฎหมายสองประเภทเข้าด้วยกัน -
- กฎแห่งการเสพติด
- กฎแห่งความเป็นเนื้อเดียวกัน

ทั้งสองกฎแห่งความเป็นเนื้อเดียวกันและกฎแห่งการเติมแต่งแสดงไว้ในรูปด้านบน อย่างไรก็ตามมีเงื่อนไขอื่น ๆ เพื่อตรวจสอบว่าระบบเป็นแบบเส้นตรงหรือไม่
The conditions are -
- เอาต์พุตควรเป็นศูนย์สำหรับอินพุตเป็นศูนย์
- ไม่ควรมีตัวดำเนินการที่ไม่ใช่เชิงเส้นอยู่ในระบบ
ตัวอย่างของตัวดำเนินการที่ไม่ใช่เชิงเส้น -
(a) ตัวดำเนินการตรีโกณมิติ - Sin, Cos, Tan, Cot, Sec, Cosec เป็นต้น
(b) เอกซ์โพเนนเชียลลอการิทึมโมดูลัสสี่เหลี่ยมลูกบาศก์เป็นต้น
(c) sa (i / p), Sinc (i / p), Sqn (i / p) เป็นต้น
อินพุต x หรือเอาต์พุต y ไม่ควรมีตัวดำเนินการที่ไม่ใช่เชิงเส้นเหล่านี้
ตัวอย่าง
ให้เราตรวจสอบว่าระบบต่อไปนี้เป็นเชิงเส้นหรือไม่
a) $y(t) = x(t)+3$
ระบบนี้ไม่ใช่ระบบเชิงเส้นเนื่องจากละเมิดเงื่อนไขแรก ถ้าเราใส่อินพุตเป็นศูนย์ทำให้ x (t) = 0 แสดงว่าเอาต์พุตไม่เป็นศูนย์
b) $y(t) = \sin tx(t)$
ในระบบนี้ถ้าเราให้อินพุตเป็นศูนย์เอาต์พุตจะกลายเป็นศูนย์ ดังนั้นเงื่อนไขแรกคือความพึงพอใจอย่างชัดเจน อีกครั้งไม่มีตัวดำเนินการที่ไม่ใช่เชิงเส้นที่ใช้กับ x (t) ดังนั้นเงื่อนไขที่สองก็พอใจเช่นกัน ดังนั้นระบบจึงเป็นระบบเชิงเส้น
c) $y(t) = \sin (x(t))$
ในระบบข้างต้นเงื่อนไขแรกเป็นที่พอใจเพราะถ้าเราใส่ x (t) = 0 ผลลัพธ์ก็จะเป็น sin (0) = 0 เช่นกันอย่างไรก็ตามเงื่อนไขที่สองไม่เป็นที่พอใจเนื่องจากมีตัวดำเนินการที่ไม่ใช่เชิงเส้นซึ่ง ดำเนินการ x (t) ดังนั้นระบบจึงไม่เป็นเส้นตรง
ถ้าเราต้องการกำหนดระบบนี้เราสามารถพูดได้ว่าระบบที่ไม่ใช่เชิงเส้นเป็นระบบที่ไม่ใช่เชิงเส้น เห็นได้ชัดว่าเงื่อนไขทั้งหมดที่ถูกละเมิดในระบบเชิงเส้นควรเป็นที่พอใจในกรณีนี้
เงื่อนไข
เอาต์พุตไม่ควรเป็นศูนย์เมื่ออินพุตที่ใช้เป็นศูนย์
สามารถใช้ตัวดำเนินการที่ไม่ใช่เชิงเส้นกับอินพุตหรือเอาต์พุตเพื่อทำให้ระบบไม่เป็นเชิงเส้น
ตัวอย่าง
เพื่อดูว่าระบบที่กำหนดเป็นแบบเส้นตรงหรือไม่เป็นเส้นตรง
a) $y(t) = e^{x(t)}$
ในระบบข้างต้นเงื่อนไขแรกเป็นที่พอใจเพราะถ้าเราทำให้อินพุตเป็นศูนย์ผลลัพธ์คือ 1 นอกจากนี้ตัวดำเนินการที่ไม่ใช่เชิงเส้นแบบเอ็กซ์โพเนนเชียลจะถูกนำไปใช้กับอินพุต เห็นได้ชัดว่าเป็นกรณีของระบบ Non-Linear
b) $y(t) = x(t+1)+x(t-1)$
ระบบประเภทข้างต้นเกี่ยวข้องกับคุณค่าทั้งในอดีตและในอนาคต อย่างไรก็ตามหากเราจะทำให้อินพุตเป็นศูนย์แสดงว่าไม่มีค่าใดเลย ดังนั้นเราสามารถพูดได้ว่าหากอินพุตเป็นศูนย์ดังนั้นเวลาที่ปรับขนาดและเวอร์ชันที่เลื่อนเวลาของอินพุตจะเป็นศูนย์ด้วยซึ่งละเมิดเงื่อนไขแรกของเรา อีกครั้งไม่มีตัวดำเนินการที่ไม่ใช่เชิงเส้น ดังนั้นจึงมีการละเมิดเงื่อนไขที่สองด้วย เห็นได้ชัดว่าระบบนี้ไม่ใช่ระบบที่ไม่ใช่เชิงเส้น ค่อนข้างเป็นระบบเชิงเส้น
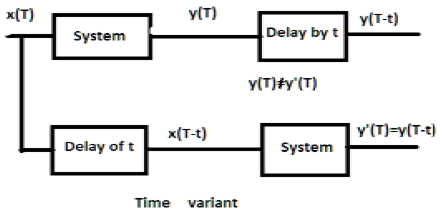
สำหรับระบบที่ไม่แปรผันตามเวลาเอาต์พุตและอินพุตควรล่าช้าออกไปโดยหน่วยเวลาบางส่วน ความล่าช้าใด ๆ ที่ระบุในอินพุตจะต้องสะท้อนให้เห็นในเอาต์พุตสำหรับระบบที่ไม่แปรผันตามเวลา
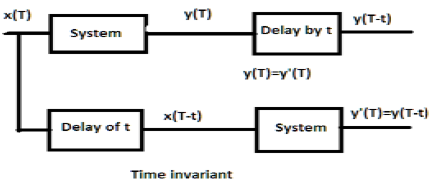
ตัวอย่าง
a) $y(T) = x(2T)$
หากนิพจน์ข้างต้นจะถูกส่งผ่านระบบก่อนแล้วจึงผ่านการหน่วงเวลา (ดังแสดงในส่วนบนของรูป) จากนั้นผลลัพธ์จะกลายเป็น$x(2T-2t)$. ตอนนี้นิพจน์เดียวกันจะถูกส่งผ่านการหน่วงเวลาก่อนแล้วจึงผ่านระบบ (ดังแสดงในส่วนล่างของรูป) ผลลัพธ์จะกลายเป็น$x(2T-t)$.
ดังนั้นระบบไม่ใช่ระบบที่ไม่แปรผันตามเวลา
b) $y(T) = \sin [x(T)]$
หากสัญญาณถูกส่งผ่านระบบก่อนจากนั้นผ่านกระบวนการหน่วงเวลาเอาต์พุตจะเป็น $\sin x(T-t)$. ในทำนองเดียวกันถ้าระบบถูกส่งผ่านการหน่วงเวลาก่อนจากนั้นผ่านระบบเอาต์พุตจะเป็น$\sin x(T-t)$. เราจะเห็นได้อย่างชัดเจนว่าเอาต์พุตทั้งสองเหมือนกัน ดังนั้นระบบจึงไม่แปรผันตามเวลา
สำหรับระบบตัวแปรเวลาเอาต์พุตและอินพุตควรล่าช้าออกไปโดยค่าคงที่ของเวลาบางส่วน แต่ความล่าช้าที่อินพุตไม่ควรสะท้อนที่เอาต์พุต กรณีมาตราส่วนเวลาทั้งหมดเป็นตัวอย่างของระบบตัวแปรเวลา ในทำนองเดียวกันเมื่อค่าสัมประสิทธิ์ในความสัมพันธ์ของระบบเป็นฟังก์ชันของเวลาระบบก็จะแปรผันตามเวลา
ตัวอย่าง
a) $y(t) = x[\cos T]$
หากสัญญาณข้างต้นถูกส่งผ่านระบบก่อนจากนั้นผ่านการหน่วงเวลาเอาต์พุตจะเป็น $x\cos (T-t)$. หากผ่านการหน่วงเวลาก่อนแล้วจึงผ่านระบบจะเป็น$x(\cos T-t)$. เนื่องจากเอาต์พุตไม่เหมือนกันระบบจึงเป็นตัวแปรตามเวลา
b) $y(T) = \cos T.x(T)$
หากนิพจน์ข้างต้นถูกส่งผ่านระบบก่อนและจากนั้นผ่านการหน่วงเวลาผลลัพธ์จะเป็น $\cos(T-t)x(T-t)$. อย่างไรก็ตามหากนิพจน์ถูกส่งผ่านการหน่วงเวลาก่อนแล้วจึงผ่านระบบเอาต์พุตจะเป็น$\cos T.x(T-t)$. เนื่องจากเอาต์พุตไม่เหมือนกันระบบจึงเป็นตัวแปรตามเวลา
ระบบที่เสถียรเป็นไปตามเงื่อนไข BIBO (อินพุทที่กำหนดขอบเขตสำหรับเอาต์พุตที่มีขอบเขต) ในที่นี้หมายถึงขอบเขต จำกัด ในแอมพลิจูด สำหรับระบบที่มีเสถียรภาพเอาต์พุตควรมีขอบเขตหรือ จำกัด สำหรับอินพุต จำกัด หรือขอบเขตในทุกช่วงเวลา
ตัวอย่างบางส่วนของอินพุทแบบมีขอบเขตคือฟังก์ชันของไซน์โคไซน์ DC เครื่องหมายและขั้นตอนของหน่วย
ตัวอย่าง
a) $y(t) = x(t)+10$
ที่นี่สำหรับอินพุตขอบเขตที่แน่นอนเราสามารถรับเอาต์พุตแบบกำหนดขอบเขตที่แน่นอนได้เช่นถ้าเราใส่ $x(t) = 2, y(t) = 12$ซึ่งมีขอบเขตอยู่ในธรรมชาติ ดังนั้นระบบจึงมีความเสถียร
b) $y(t) = \sin [x(t)]$
ในนิพจน์ที่กำหนดเรารู้ว่าฟังก์ชันไซน์มีขอบเขตของค่าที่แน่นอนซึ่งอยู่ระหว่าง -1 ถึง +1 ดังนั้นค่าใดก็ตามที่เราจะแทนที่ด้วย x (t) เราจะได้ค่าภายในขอบเขตของเรา ดังนั้นระบบจึงมีความเสถียร
ระบบที่ไม่เสถียรไม่เป็นไปตามเงื่อนไข BIBO ดังนั้นสำหรับอินพุตที่มีขอบเขตเราไม่สามารถคาดหวังเอาต์พุตที่มีขอบเขตได้ในกรณีของระบบที่ไม่เสถียร
ตัวอย่าง
a) $y(t) = tx(t)$
ที่นี่สำหรับอินพุต จำกัด เราไม่สามารถคาดหวังผลลัพธ์ที่ จำกัด ได้ ตัวอย่างเช่นถ้าเราจะใส่$x(t) = 2 \Rightarrow y(t) = 2t$. นี่ไม่ใช่ค่า จำกัด เพราะเราไม่รู้ค่า t ดังนั้นจึงสามารถอยู่ได้จากทุกที่ ดังนั้นระบบนี้จึงไม่เสถียร มันเป็นระบบที่ไม่เสถียร
b) $y(t) = \frac{x(t)}{\sin t}$
เราได้พูดคุยกันก่อนหน้านี้ว่าฟังก์ชันไซน์มีช่วงที่แน่นอนตั้งแต่ -1 ถึง +1; แต่ที่นี่มีอยู่ในตัวส่วน ดังนั้นในกรณีที่เลวร้ายที่สุดถ้าเราใส่ t = 0 และฟังก์ชันไซน์กลายเป็นศูนย์ระบบทั้งหมดจะไม่มีที่สิ้นสุด ดังนั้นระบบประเภทนี้จึงไม่เสถียรเลย เห็นได้ชัดว่านี่เป็นระบบที่ไม่เสถียร
Example 1 - ตรวจสอบว่า $y(t) = x*(t)$ เป็นเส้นตรงหรือไม่เป็นเส้นตรง
Solution- ฟังก์ชันแสดงถึงคอนจูเกตของอินพุต สามารถตรวจสอบได้โดยกฎข้อแรกของความเป็นเนื้อเดียวกันและกฎแห่งการเติมแต่งหรือโดยกฎสองข้อ อย่างไรก็ตามการยืนยันผ่านกฎนั้นง่ายกว่ามากดังนั้นเราจะดำเนินการตามนั้น
หากอินพุตไปยังระบบเป็นศูนย์เอาต์พุตก็มีแนวโน้มที่จะเป็นศูนย์เช่นกัน ดังนั้นเงื่อนไขแรกของเราคือความพึงพอใจ ไม่มีตัวดำเนินการที่ไม่ใช่เชิงเส้นที่ใช้ที่อินพุตหรือเอาต์พุต ดังนั้นระบบจึงเป็น Linear
Example 2 - ตรวจสอบว่า $y(t)=\begin{cases}x(t+1), & t > 0\\x(t-1), & t\leq 0\end{cases}$ เป็นเส้นตรงหรือไม่เป็นเส้นตรง
Solution- เห็นได้ชัดว่าเมื่อเวลาน้อยกว่าหรือเท่ากับศูนย์อินพุตจะกลายเป็นศูนย์ ดังนั้นเราสามารถพูดได้ว่าที่อินพุตเป็นศูนย์ผลลัพธ์ก็เป็นศูนย์เช่นกันและเงื่อนไขแรกของเราก็พอใจแล้ว
อีกครั้งไม่มีตัวดำเนินการที่ไม่ใช่เชิงเส้นที่ใช้ที่อินพุตหรือที่เอาต์พุต ดังนั้นระบบจึงเป็น Linear
Example 3 - ตรวจสอบว่า $y(t) = \sin t.x(t)$ มีความเสถียรหรือไม่
Solution - สมมติว่าเรานำค่า x (t) เป็น 3 ที่นี่ฟังก์ชันไซน์ถูกคูณด้วยและค่าสูงสุดและต่ำสุดของฟังก์ชันไซน์จะแตกต่างกันระหว่าง -1 ถึง +1
ดังนั้นค่าสูงสุดและต่ำสุดของฟังก์ชันทั้งหมดจะแตกต่างกันไประหว่าง -3 ถึง +3 ดังนั้นระบบจึงมีเสถียรภาพเนื่องจากที่นี่เราได้รับอินพุตแบบขอบเขตสำหรับเอาต์พุตที่มีขอบเขต
Discrete Time Fourier Transform (DTFT) มีไว้สำหรับสัญญาณพลังงานและพลังงาน Z-transform ยังมีอยู่สำหรับสัญญาณประเภทพลังงานหรือพลังงาน (NENP) ในระดับหนึ่งเท่านั้น การเปลี่ยน$z=e^{jw}$ ใช้สำหรับการแปลง Z เป็น DTFT สำหรับสัญญาณที่สรุปได้เท่านั้น
ดังนั้นการแปลง Z ของสัญญาณเวลาที่ไม่ต่อเนื่อง x (n) ในอนุกรมกำลังจึงสามารถเขียนเป็น -
$$X(z) = \sum_{n-\infty}^\infty x(n)Z^{-n}$$สมการข้างต้นแสดงสมการแปลง Z สองด้าน
โดยทั่วไปเมื่อสัญญาณถูกแปลงเป็น Z มันสามารถแสดงเป็น -
$$X(Z) = Z[x(n)]$$หรือ $x(n) \longleftrightarrow X(Z)$
หากเป็นสัญญาณเวลาต่อเนื่องก็ไม่จำเป็นต้องใช้การแปลง Z เนื่องจากใช้การแปลงลาปลาซ อย่างไรก็ตามสัญญาณเวลาไม่ต่อเนื่องสามารถวิเคราะห์ได้ผ่านการแปลง Z เท่านั้น
ภูมิภาคของการบรรจบกัน
Region of Convergence คือช่วงของตัวแปร Z ที่ซับซ้อนในระนาบ Z การแปลง Z ของสัญญาณนั้น จำกัด หรือบรรจบกัน ดังนั้น ROC จึงแสดงถึงชุดค่าของ Z ซึ่ง X (Z) มีค่า จำกัด
คุณสมบัติของ ROC
- ROC ไม่รวมเสาใด ๆ
- สำหรับสัญญาณด้านขวา ROC จะอยู่นอกวงกลมในระนาบ Z
- สำหรับสัญญาณด้านซ้าย ROC จะอยู่ในวงกลมในระนาบ Z
- เพื่อความเสถียร ROC รวมวงกลมหน่วยในระนาบ Z
- สำหรับสัญญาณทั้งสองด้าน ROC เป็นวงแหวนในระนาบ Z
- สำหรับสัญญาณระยะเวลา จำกัด ROC คือระนาบ Z ทั้งหมด
Z-transform มีลักษณะเฉพาะคือ -
- การแสดงออกของ X (Z)
- ROC ของ X (Z)
สัญญาณและ ROC
| x (n) | X (Z) | ร็อค |
|---|---|---|
| $\delta(n)$ | $1$ | เครื่องบิน Z ทั้งหมด |
| $U(n)$ | $1/(1-Z^{-1})$ | Mod (Z)> 1 |
| $a^nu(n)$ | $1/(1-aZ^{-1})$ | มอด (Z)> มอด (ก) |
| $-a^nu(-n-1)$ | $1/(1-aZ^{-1})$ | Mod (Z) <Mod (a) |
| $na^nu(n)$ | $aZ^{-1}/(1-aZ^{-1})^2$ | มอด (Z)> มอด (ก) |
| $-a^nu(-n-1)$ | $aZ^{-1}/(1-aZ^{-1})^2$ | Mod (Z) <Mod (a) |
| $U(n)\cos \omega n$ | $(Z^2-Z\cos \omega)/(Z^2-2Z \cos \omega +1)$ | Mod (Z)> 1 |
| $U(n)\sin \omega n$ | $(Z\sin \omega)/(Z^2-2Z \cos \omega +1)$ | Mod (Z)> 1 |
ตัวอย่าง
ให้เราหา Z-transform และ ROC ของสัญญาณที่กำหนดให้เป็น $x(n) = \lbrace 7,3,4,9,5\rbrace$โดยจุดกำเนิดของซีรีส์อยู่ที่ 3
Solution - ใช้สูตรที่เรามี -
$X(z) = \sum_{n=-\infty}^\infty x(n)Z^{-n}$
$= \sum_{n=-1}^3 x(n)Z^{-n}$
$= x(-1)Z+x(0)+x(1)Z^{-1}+x(2)Z^{-2}+x(3)Z^{-3}$
$= 7Z+3+4Z^{-1}+9Z^{-2}+5Z^{-3}$
ROC คือระนาบ Z ทั้งหมดยกเว้น Z = 0, ∞, -∞
ในบทนี้เราจะเข้าใจคุณสมบัติพื้นฐานของการแปลง Z
ความเป็นเส้นตรง
ระบุว่าเมื่อสัญญาณที่ไม่ต่อเนื่องสองสัญญาณหรือมากกว่านั้นคูณด้วยค่าคงที่การแปลง Z ตามลำดับจะถูกคูณด้วยค่าคงที่เดียวกัน
ในทางคณิตศาสตร์
$$a_1x_1(n)+a_2x_2(n) = a_1X_1(z)+a_2X_2(z)$$Proof - เรารู้ว่า
$$X(Z) = \sum_{n=-\infty}^\infty x(n)Z^{-n}$$$= \sum_{n=-\infty}^\infty (a_1x_1(n)+a_2x_2(n))Z^{-n}$
$= a_1\sum_{n = -\infty}^\infty x_1(n)Z^{-n}+a_2\sum_{n = -\infty}^\infty x_2(n)Z^{-n}$
$= a_1X_1(z)+a_2X_2(z)$ (จึงพิสูจน์แล้ว)
ที่นี่ ROC คือ $ROC_1\bigcap ROC_2$.
การเปลี่ยนเวลา
คุณสมบัติการเปลี่ยนเวลาแสดงให้เห็นว่าการเปลี่ยนแปลงของโดเมนเวลาในสัญญาณไม่ต่อเนื่องจะส่งผลต่อโดเมน Z ซึ่งสามารถเขียนเป็น;
$$x(n-n_0)\longleftrightarrow X(Z)Z^{-n}$$หรือ $x(n-1)\longleftrightarrow Z^{-1}X(Z)$
Proof -
ปล่อย $y(P) = X(P-K)$
$Y(z) = \sum_{p = -\infty}^\infty y(p)Z^{-p}$
$= \sum_{p = -\infty}^\infty (x(p-k))Z^{-p}$
ให้ s = pk
$= \sum_{s = -\infty}^\infty x(s)Z^{-(s+k)}$
$= \sum_{s = -\infty}^\infty x(s)Z^{-s}Z^{-k}$
$= Z^{-k}[\sum_{s=-\infty}^\infty x(m)Z^{-s}]$
$= Z^{-k}X(Z)$ (จึงพิสูจน์แล้ว)
ที่นี่ ROC สามารถเขียนเป็น Z = 0 (p> 0) หรือ Z = ∞ (p <0)
ตัวอย่าง
U (n) และ U (n-1) สามารถลงจุดได้ดังนี้
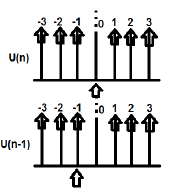
Z-transformation ของ U (n) cab เขียนเป็น;
$\sum_{n = -\infty}^\infty [U(n)]Z^{-n} = 1$
การแปลง Z ของ U (n-1) สามารถเขียนเป็น;
$\sum_{n = -\infty}^\infty [U(n-1)]Z^{-n} = Z^{-1}$
ที่นี่ $x(n-n_0) = Z^{-n_0}X(Z)$ (จึงพิสูจน์แล้ว)
การปรับเวลา
คุณสมบัติ Time Scaling บอกเราว่าโดเมน Z ของสัญญาณจะเป็นอย่างไรเมื่อเวลาถูกปรับขนาดในรูปแบบไม่ต่อเนื่องซึ่งสามารถเขียนเป็น;
$$a^nx(n) \longleftrightarrow X(a^{-1}Z)$$Proof -
ปล่อย $y(p) = a^{p}x(p)$
$Y(P) = \sum_{p=-\infty}^\infty y(p)Z^{-p}$
$= \sum_{p=-\infty}^\infty a^px(p)Z^{-p}$
$= \sum_{p=-\infty}^\infty x(p)[a^{-1}Z]^{-p}$
$= X(a^{-1}Z)$(จึงพิสูจน์แล้ว)
ROC: = Mod (ar1) <Mod (Z) <Mod (ar2) โดยที่ Mod = Modulus
ตัวอย่าง
ให้เราตรวจสอบการแปลง Z ของ $x(n) = a^n \cos \omega n$ โดยใช้คุณสมบัติการปรับเวลา
Solution -
เรารู้แล้วว่าการแปลง Z ของสัญญาณ $\cos (\omega n)$ ให้โดย -
$$\sum_{n=-\infty}^\infty(\cos \omega n)Z^{-n} = (Z^2-Z \cos \omega)/(Z^2-2Z\cos \omega +1)$$
ตอนนี้ใช้คุณสมบัติ Time scaling การแปลง Z ของ $a^n \cos \omega n$ สามารถเขียนเป็น;
$\sum_{n=-\infty}^\infty(a^n\cos \omega n)Z^{-n} = X(a^{-1}Z)$
$= [(a^{-1}Z)^2-(a^{-1}Z \cos \omega n)]/((a^{-1}Z)^2-2(a^{-1}Z \cos \omega n)+1)$
$= Z(Z-a \cos \omega)/(Z^2-2az \cos \omega+a^2)$
ความแตกต่างอย่างต่อเนื่อง
คุณสมบัติความแตกต่างแบบต่อเนื่องแสดงให้เห็นว่าการแปลง Z จะเกิดขึ้นเมื่อเราแยกความแตกต่างของสัญญาณที่ไม่ต่อเนื่องในโดเมนเวลาตามเวลา ดังแสดงด้านล่าง
$$\frac{dx(n)}{dn} = (1-Z^{-1})X(Z)$$Proof -
พิจารณา LHS ของสมการ - $\frac{dx(n)}{dn}$
$$= \frac{[x(n)-x(n-1)]}{[n-(n-1)]}$$$= x(n)-X(n-1)$
$= x(Z)-Z^{-1}x(Z)$
$= (1-Z^{-1})x(Z)$ (จึงพิสูจน์แล้ว)
ROC: R1 <Mod (Z) <R2
ตัวอย่าง
ให้เราค้นหาการแปลง Z ของสัญญาณที่กำหนดโดย $x(n) = n^2u(n)$
ตามคุณสมบัติเราสามารถเขียน
$Zz[nU(n)] = -Z\frac{dZ[U(n)]}{dz}$
$= -Z\frac{d[\frac{Z}{Z-1}]}{dZ}$
$= Z/((Z-1)^2$
$= y(let)$
ตอนนี้ Z [ny] สามารถพบได้โดยการใช้คุณสมบัติอีกครั้ง
$Z(n,y) = -Z\frac{dy}{dz}$
$= -Z\frac{d[Z/(Z-1)^3]}{dz}$
$= Z(Z+1)/(Z-1)^2$
การแปลง
สิ่งนี้แสดงให้เห็นถึงการเปลี่ยนแปลงในโดเมน Z ของระบบเมื่อเกิด Convolution ในรูปแบบสัญญาณที่ไม่ต่อเนื่องซึ่งสามารถเขียนเป็น -
$x_1(n)*x_2(n) \longleftrightarrow X_1(Z).X_2(Z)$
Proof -
$X(Z) = \sum_{n = -\infty}^\infty x(n)Z^{-n}$
$= \sum_{n=-\infty}^\infty[\sum_{k = -\infty}^\infty x_1(k)x_2(n-k)]Z^{-n}$
$= \sum_{k = -\infty}^\infty x_1(k)[\sum_n^\infty x_2(n-k)Z^{-n}]$
$= \sum_{k = -\infty}^\infty x_1(k)[\sum_{n = -\infty}^\infty x_2(n-k)Z^{-(n-k)}Z^{-k}]$
ให้ nk = l จากนั้นสมการด้านบนจะเขียนเป็น -
$X(Z) = \sum_{k = -\infty}^\infty x_1(k)[Z^{-k}\sum_{l=-\infty}^\infty x_2(l)Z^{-l}]$
$= \sum_{k = -\infty}^\infty x_1(k)X_2(Z)Z^{-k}$
$= X_2(Z)\sum_{k = -\infty}^\infty x_1(Z)Z^{-k}$
$= X_1(Z).X_2(Z)$ (จึงพิสูจน์แล้ว)
ร็อค:$ROC\bigcap ROC2$
ตัวอย่าง
ให้เราค้นหาการประชุมที่ได้รับจากสัญญาณสองสัญญาณ
$x_1(n) = \lbrace 3,-2,2\rbrace$ ... (อค. 1)
$x_2(n) = \lbrace 2,0\leq 4\quad and\quad 0\quad elsewhere\rbrace$ ... (อค. 2)
การแปลง Z ของสมการแรกสามารถเขียนเป็น;
$\sum_{n = -\infty}^\infty x_1(n)Z^{-n}$
$= 3-2Z^{-1}+2Z^{-2}$
การแปลง Z ของสัญญาณที่สองสามารถเขียนเป็น;
$\sum_{n = -\infty}^\infty x_2(n)Z^{-n}$
$= 2+2Z^{-1}+2Z^{-2}+2Z^{-3}+2Z^{-4}$
ดังนั้นการแปลงสัญญาณทั้งสองข้างต้นจะได้รับโดย -
$X(Z) = [x_1(Z)^*x_2(Z)]$
$= [3-2Z^{-1}+2Z^{-2}]\times [2+2Z^{-1}+2Z^{-2}+2Z^{-3}+2Z^{-4}]$
$= 6+2Z^{-1}+6Z^{-2}+6Z^{-3}+...\quad...\quad...$
การแปลง Z แบบผกผันที่เราได้รับ
$x(n) = \lbrace 6,2,6,6,6,0,4\rbrace$
ทฤษฎีบทค่าเริ่มต้น
ถ้า x (n) เป็นลำดับเชิงสาเหตุซึ่งมีการแปลง Z เป็น X (z) ดังนั้นทฤษฎีบทค่าเริ่มต้นสามารถเขียนเป็น;
$X(n)(at\quad n = 0) = \lim_{z \to \infty} X(z)$
Proof - เรารู้ว่า
$X(Z) = \sum_{n = 0} ^\infty x(n)Z^{-n}$
ขยายชุดด้านบนเราได้รับ;
$= X(0)Z^0+X(1)Z^{-1}+X(2)Z^{-2}+...\quad...$
$= X(0)\times 1+X(1)Z^{-1}+X(2)Z^{-2}+...\quad...$
ในกรณีข้างต้นถ้า Z →∞แล้ว $Z^{-n}\rightarrow 0$ (เพราะ n> 0)
ดังนั้นเราสามารถพูด;
$\lim_{z \to \infty}X(z) = X(0)$ (จึงพิสูจน์แล้ว)
ทฤษฎีบทมูลค่าสุดท้าย
ทฤษฎีบทค่าสุดท้ายระบุว่าหากการแปลง Z ของสัญญาณแสดงเป็น X (Z) และเสาทั้งหมดอยู่ในวงกลมค่าสุดท้ายจะแสดงเป็น x (n) หรือ X (∞) และสามารถเขียนเป็น -
$X(\infty) = \lim_{n \to \infty}X(n) = \lim_{z \to 1}[X(Z)(1-Z^{-1})]$
Conditions -
- ใช้ได้กับระบบเชิงสาเหตุเท่านั้น
- $X(Z)(1-Z^{-1})$ ควรมีเสาภายในวงกลมหน่วยในระนาบ Z
Proof - เรารู้ว่า
$Z^+[x(n+1)-x(n)] = \lim_{k \to \infty}\sum_{n=0}^kZ^{-n}[x(n+1)-x(n)]$
$\Rightarrow Z^+[x(n+1)]-Z^+[x(n)] = \lim_{k \to \infty}\sum_{n=0}^kZ^{-n}[x(n+1)-x(n)]$
$\Rightarrow Z[X(Z)^+-x(0)]-X(Z)^+ = \lim_{k \to \infty}\sum_{n = 0}^kZ^{-n}[x(n+1)-x(n)]$
ที่นี่เราสามารถใช้คุณสมบัติขั้นสูงของการแปลง Z ด้านเดียวได้ ดังนั้นสมการข้างต้นสามารถเขียนใหม่ได้เป็น;
$Z^+[x(n+1)] = Z[X(2)^+-x(0)Z^0] = Z[X(Z)^+-x(0)]$
ตอนนี้ใส่ z = 1 ในสมการข้างบนเราสามารถขยายสมการข้างบนได้ -
$\lim_{k \to \infty}{[x(1)-x(0)+x(6)-x(1)+x(3)-x(2)+...\quad...\quad...+x(x+1)-x(k)]}$
สามารถกำหนดเป็น;
$X(\infty) = \lim_{n \to \infty}X(n) = \lim_{z \to 1}[X(Z)(1-Z^{-1})]$(จึงพิสูจน์แล้ว)
ตัวอย่าง
ให้เราหาค่าเริ่มต้นและค่าสุดท้ายของ x (n) ซึ่งสัญญาณถูกกำหนดโดย
$X(Z) = 2+3Z^{-1}+4Z^{-2}$
Solution - อันดับแรกให้เราหาค่าเริ่มต้นของสัญญาณโดยใช้ทฤษฎีบท
$x(0) = \lim_{z \to \infty}X(Z)$
$= \lim_{z \to \infty}[2+3Z^{-1}+4Z^{-2}]$
$= 2+(\frac{3}{\infty})+(\frac{4}{\infty}) = 2$
ตอนนี้ให้เราหาค่าสุดท้ายของสัญญาณที่ใช้ทฤษฎีบท
$x(\infty) = \lim_{z \to \infty}[(1-Z^{-1})X(Z)]$
$= \lim_{z \to \infty}[(1-Z^{-1})(2+3Z^{-1}+4Z^{-2})]$
$= \lim_{z \to \infty}[2+Z^{-1}+Z^{-2}-4Z^{-3}]$
$= 2+1+1-4 = 0$
Some other properties of Z-transform are listed below -
ความแตกต่างของความถี่
มันทำให้เกิดการเปลี่ยนแปลงในโดเมน Z ของสัญญาณเมื่อสัญญาณที่ไม่ต่อเนื่องแตกต่างกันไปตามเวลา
$nx(n)\longleftrightarrow -Z\frac{dX(z)}{dz}$
ROC สามารถเขียนเป็น;
$r_2< Mod(Z)< r_1$
ตัวอย่าง
ให้เราหาค่าของ x (n) ผ่านความแตกต่างของความถี่ซึ่งสัญญาณที่ไม่ต่อเนื่องในโดเมน Z ได้รับ $x(n)\longleftrightarrow X(Z) = log(1+aZ^{-1})$
ตามคุณสมบัติเราสามารถเขียนได้
$nx(n)\longleftrightarrow -Z\frac{dx(Z)}{dz}$
$= -Z[\frac{-aZ^{-2}}{1+aZ^{-1}}]$
$= (aZ^{-1})/(1+aZ^{-1})$
$= 1-1/(1+aZ^{-1})$
$nx(n) = \delta(n)-(-a)^nu(n)$
$\Rightarrow x(n) = 1/n[\delta(n)-(-a)^nu(n)]$
การคูณในเวลา
จะให้การเปลี่ยนแปลงในโดเมน Z ของสัญญาณเมื่อการคูณเกิดขึ้นที่ระดับสัญญาณไม่ต่อเนื่อง
$x_1(n).x_2(n)\longleftrightarrow(\frac{1}{2\Pi j})[X1(Z)*X2(Z)]$
การผันเวลา
สิ่งนี้แสดงถึงการเป็นตัวแทนของสัญญาณที่ไม่ต่อเนื่องผันในโดเมน Z
$X^*(n)\longleftrightarrow X^*(Z^*)$
ระบบที่มีฟังก์ชันของระบบจะมีเสถียรภาพได้ก็ต่อเมื่อเสาทั้งหมดอยู่ในวงกลมยูนิตเท่านั้น ขั้นแรกให้ตรวจสอบว่าระบบมีสาเหตุหรือไม่ หากระบบเป็นสาเหตุเราจะทำการกำหนดความเสถียรของ BIBO โดยที่ความเสถียรของ BIBO หมายถึงอินพุตที่มีขอบเขตสำหรับเงื่อนไขเอาต์พุตที่มีขอบเขต
สามารถเขียนเป็น;
$Mod(X(Z))< \infty$
$= Mod(\sum x(n)Z^{-n})< \infty$
$= \sum Mod(x(n)Z^{-n})< \infty$
$= \sum Mod[x(n)(re^{jw})^{-n}]< 0$
$= \sum Mod[x(n)r^{-n}]Mod[e^{-jwn}]< \infty$
$= \sum_{n = -\infty}^\infty Mod[x(n)r^{-n}]< \infty$
สมการข้างต้นแสดงเงื่อนไขการดำรงอยู่ของการแปลง Z
อย่างไรก็ตามเงื่อนไขสำหรับการมีอยู่ของสัญญาณ DTFT คือ
$$\sum_{n = -\infty}^\infty Mod(x(n)< \infty$$ตัวอย่าง 1
ให้เราลองหา Z-transform ของสัญญาณซึ่งได้รับเป็น
$x(n) = -(-0.5)^{-n}u(-n)+3^nu(n)$
$= -(-2)^nu(n)+3^nu(n)$
Solution - ที่นี่สำหรับ $-(-2)^nu(n)$ ROC อยู่ด้านซ้ายและ Z <2
สำหรับ $3^nu(n)$ ROC อยู่ด้านขวาและ Z> 3
ดังนั้นที่นี่ Z-transform ของสัญญาณจะไม่มีอยู่เนื่องจากไม่มีภูมิภาคทั่วไป
ตัวอย่าง 2
ให้เราลองหา Z-transform ของสัญญาณที่กำหนด
$x(n) = -2^nu(-n-1)+(0.5)^nu(n)$
Solution - ที่นี่สำหรับ $-2^nu(-n-1)$ ROC ของสัญญาณอยู่ด้านซ้ายและ Z <2
สำหรับสัญญาณ $(0.5)^nu(n)$ ROC อยู่ด้านขวาและ Z> 0.5
ดังนั้น ROC ทั่วไปจึงถูกสร้างขึ้นเป็น 0.5 <Z <2
ดังนั้น Z-transform สามารถเขียนเป็น;
$X(Z) = \lbrace\frac{1}{1-2Z^{-1}}\rbrace+\lbrace\frac{1}{(1-0.5Z)^{-1}}\rbrace$
ตัวอย่างที่ 3
ให้เราลองหา Z-transform ของสัญญาณซึ่งได้รับเป็น $x(n) = 2^{r(n)}$
Solution- r (n) คือสัญญาณทางลาด ดังนั้นสัญญาณสามารถเขียนเป็น;
$x(n) = 2^{nu(n)}\lbrace 1, n<0 (u(n)=0)\quad and\quad2^n, n\geq 0(u(n) = 1)\rbrace$
$= u(-n-1)+2^nu(n)$
ที่นี่สำหรับสัญญาณ $u(-n-1)$ และ ROC Z <1 และสำหรับ $2^nu(n)$ กับ ROC คือ Z> 2
ดังนั้นจะไม่มีการแปลงสัญญาณ Z ของสัญญาณ
Z -Transform สำหรับระบบสาเหตุ
ระบบสาเหตุสามารถกำหนดเป็น $h(n) = 0,n<0$. สำหรับระบบเชิงสาเหตุ ROC จะอยู่นอกวงกลมในระนาบ Z
$H(Z) = \displaystyle\sum\limits_{n = 0}^{\infty}h(n)Z^{-n}$
ขยายสมการข้างต้น
$H(Z) = h(0)+h(1)Z^{-1}+h(2)Z^{-2}+...\quad...\quad...$
$= N(Z)/D(Z)$
สำหรับระบบเชิงสาเหตุการขยายฟังก์ชัน Transfer ไม่รวมพลังบวกของ Z สำหรับระบบเชิงสาเหตุลำดับของตัวเศษต้องไม่เกินลำดับของตัวส่วน สามารถเขียนเป็น -
$\lim_{z \rightarrow \infty}H(Z) = h(0) = 0\quad or\quad Finite$
เพื่อความเสถียรของระบบสาเหตุเสาของฟังก์ชัน Transfer ควรอยู่ในวงกลมหน่วยในระนาบ Z
Z-transform สำหรับระบบต่อต้านสาเหตุ
ระบบต่อต้านสาเหตุสามารถกำหนดเป็น $h(n) = 0, n\geq 0$. สำหรับระบบต่อต้านสาเหตุเสาของฟังก์ชันการถ่ายโอนควรอยู่นอกวงกลมหน่วยในระนาบ Z สำหรับระบบต่อต้านสาเหตุ ROC จะอยู่ในวงกลมในระนาบ Z
หากเราต้องการวิเคราะห์ระบบซึ่งแสดงอยู่แล้วในโดเมนความถี่เป็นสัญญาณเวลาที่ไม่ต่อเนื่องเราก็ไปหา Inverse Z-transformation
ในทางคณิตศาสตร์สามารถแสดงเป็น;
$$x(n) = Z^{-1}X(Z)$$โดยที่ x (n) เป็นสัญญาณในโดเมนเวลาและ X (Z) คือสัญญาณในโดเมนความถี่
หากเราต้องการแสดงสมการข้างต้นในรูปแบบอินทิกรัลเราสามารถเขียนเป็น
$$x(n) = (\frac{1}{2\Pi j})\oint X(Z)Z^{-1}dz$$ที่นี่อินทิกรัลอยู่บนเส้นทางปิด C เส้นทางนี้อยู่ภายใน ROC ของ x (z) และมีจุดกำเนิด
วิธีค้นหา Inverse Z-Transform
เมื่อต้องการการวิเคราะห์ในรูปแบบไม่ต่อเนื่องเราจะแปลงสัญญาณโดเมนความถี่กลับเป็นรูปแบบไม่ต่อเนื่องผ่านการแปลง Z แบบผกผัน เราทำตามสี่วิธีต่อไปนี้เพื่อพิจารณาการแปลง Z แบบผกผัน
- วิธีการหารยาว
- วิธีการขยายเศษส่วนบางส่วน
- วิธีการอินทิกรัลที่เหลือหรือคอนทัวร์
วิธีการหารยาว
ในวิธีนี้การแปลง Z ของสัญญาณ x (z) สามารถแสดงเป็นอัตราส่วนของพหุนามดังที่แสดงด้านล่าง
$$x(z)=N(Z)/D(Z)$$ทีนี้ถ้าเราหารเศษด้วยตัวส่วนเราจะได้อนุกรมดังที่แสดงด้านล่าง
$$X(z) = x(0)+x(1)Z^{-1}+x(2)Z^{-2}+...\quad...\quad...$$ลำดับข้างต้นแสดงถึงชุดของการแปลง Z แบบผกผันของสัญญาณที่กำหนด (สำหรับn≥0) และระบบข้างต้นเป็นสาเหตุ
อย่างไรก็ตามสำหรับ n <0 อนุกรมสามารถเขียนเป็น;
$$x(z) = x(-1)Z^1+x(-2)Z^2+x(-3)Z^3+...\quad...\quad...$$วิธีการขยายเศษส่วนบางส่วน
ที่นี่สัญญาณจะแสดงก่อนในรูปแบบ N (z) / D (z)
ถ้าเป็นเศษส่วนอย่างมีเหตุผลจะแสดงดังนี้
$x(z) = b_0+b_1Z^{-1}+b_2Z^{-2}+...\quad...\quad...+b_mZ^{-m})/(a_0+a_1Z^{-1}+a_2Z^{-2}+...\quad...\quad...+a_nZ^{-N})$
ข้อใดข้อหนึ่งไม่เหมาะสมเมื่อ m <n และ≠ 0
หากอัตราส่วนไม่เหมาะสม (เช่นไม่เหมาะสม) เราต้องแปลงเป็นรูปแบบที่เหมาะสมเพื่อแก้ปัญหา
วิธีการที่เหลือหรือ Contour Integral
ในวิธีนี้เราจะได้ค่าผกผัน Z-transform x (n) โดยการรวมส่วนที่เหลือของ $[x(z)Z^{n-1}]$ที่เสาทั้งหมด ในทางคณิตศาสตร์สิ่งนี้อาจแสดงเป็น
$$x(n) = \displaystyle\sum\limits_{all\quad poles\quad X(z)}residues\quad of[x(z)Z^{n-1}]$$ที่นี่กากสำหรับขั้วใด ๆ ของคำสั่ง m ที่ $z = \beta$ คือ
$$Residues = \frac{1}{(m-1)!}\lim_{Z \rightarrow \beta}\lbrace \frac{d^{m-1}}{dZ^{m-1}}\lbrace (z-\beta)^mX(z)Z^{n-1}\rbrace$$ตัวอย่าง 1
ค้นหาการตอบสนองของระบบ $s(n+2)-3s(n+1)+2s(n) = \delta (n)$เมื่อเงื่อนไขเริ่มต้นทั้งหมดเป็นศูนย์
Solution - เราได้การแปลง Z ทั้งสองข้างของสมการข้างต้น
$$S(z)Z^2-3S(z)Z^1+2S(z) = 1$$$\Rightarrow S(z)\lbrace Z^2-3Z+2\rbrace = 1$
$\Rightarrow S(z) = \frac{1}{\lbrace z^2-3z+2\rbrace}=\frac{1}{(z-2)(z-1)} = \frac{\alpha _1}{z-2}+\frac{\alpha _2}{z-1}$
$\Rightarrow S(z) = \frac{1}{z-2}-\frac{1}{z-1}$
เราได้การแปลง Z แบบผกผันของสมการข้างต้น
$S(n) = Z^{-1}[\frac{1}{Z-2}]-Z^{-1}[\frac{1}{Z-1}]$
$= 2^{n-1}-1^{n-1} = -1+2^{n-1}$
ตัวอย่าง 2
ค้นหาฟังก์ชันระบบ H (z) และการตอบสนองตัวอย่างหน่วย h (n) ของระบบที่มีการอธิบายสมการความแตกต่างไว้ภายใต้
$y(n) = \frac{1}{2}y(n-1)+2x(n)$
โดยที่ y (n) และ x (n) คือเอาต์พุตและอินพุตของระบบตามลำดับ
Solution - เราได้การแปลง Z ของสมการความแตกต่างข้างต้น
$y(z) = \frac{1}{2}Z^{-1}Y(Z)+2X(z)$
$= Y(Z)[1-\frac{1}{2}Z^{-1}] = 2X(Z)$
$= H(Z) = \frac{Y(Z)}{X(Z)} = \frac{2}{[1-\frac{1}{2}Z^{-1}]}$
ระบบนี้มีเสาอยู่ที่ $Z = \frac{1}{2}$ และ $Z = 0$ และ $H(Z) = \frac{2}{[1-\frac{1}{2}Z^{-1}]}$
ดังนั้นเราจึงได้การแปลง Z แบบผกผันของข้างต้น
$h(n) = 2(\frac{1}{2})^nU(n)$
ตัวอย่างที่ 3
กำหนด Y (z), n≥0ในกรณีต่อไปนี้ -
$y(n)+\frac{1}{2}y(n-1)-\frac{1}{4}y(n-2) = 0\quad given\quad y(-1) = y(-2) = 1$
Solution - ใช้ Z-transform กับสมการข้างต้นเราจะได้รับ
$Y(Z)+\frac{1}{2}[Z^{-1}Y(Z)+Y(-1)]-\frac{1}{4}[Z^{-2}Y(Z)+Z^{-1}Y(-1)+4(-2)] = 0$
$\Rightarrow Y(Z)+\frac{1}{2Z}Y(Z)+\frac{1}{2}-\frac{1}{4Z^2}Y(Z)-\frac{1}{4Z}-\frac{1}{4} = 0$
$\Rightarrow Y(Z)[1+\frac{1}{2Z}-\frac{1}{4Z^2}] =\frac{1}{4Z}-\frac{1}{2}$
$\Rightarrow Y(Z)[\frac{4Z^2+2Z-1}{4Z^2}] = \frac{1-2Z}{4Z}$
$\Rightarrow Y(Z) = \frac{Z(1-2Z)}{4Z^2+2Z-1}$
เช่นเดียวกับการแปลงฟูเรียร์ของสัญญาณเวลาต่อเนื่องการแปลงฟูริเยร์แบบไม่ต่อเนื่องสามารถใช้เพื่อแสดงลำดับที่ไม่ต่อเนื่องในการแสดงโดเมนความถี่เทียบเท่าและระบบเวลาแยก LTI และพัฒนาอัลกอริทึมการคำนวณต่างๆ
X (jω) ใน FT ต่อเนื่องเป็นฟังก์ชันต่อเนื่องของ x (n) อย่างไรก็ตาม DFT เกี่ยวข้องกับการแทนค่า x (n) ด้วยตัวอย่างของสเปกตรัม X (ω) ดังนั้นเครื่องมือทางคณิตศาสตร์นี้จึงมีความสำคัญอย่างมากในการคำนวณในการนำเสนอที่สะดวก ทั้งสองลำดับเป็นระยะและไม่เป็นระยะสามารถประมวลผลผ่านเครื่องมือนี้ ลำดับคาบจำเป็นต้องสุ่มตัวอย่างโดยการขยายระยะเวลาเป็นอนันต์
การสุ่มตัวอย่างโดเมนความถี่
จากบทนำเป็นที่ชัดเจนว่าเราจำเป็นต้องรู้วิธีดำเนินการผ่านการสุ่มตัวอย่างโดเมนความถี่เช่นการสุ่มตัวอย่าง X (ω) ดังนั้นความสัมพันธ์ระหว่างการแปลงฟูเรียร์ตัวอย่างและ DFT จึงถูกสร้างขึ้นในลักษณะต่อไปนี้
ในทำนองเดียวกันลำดับคาบก็สามารถปรับให้พอดีกับเครื่องมือนี้ได้โดยการขยายช่วงเวลา N เป็นอนันต์
ให้ลำดับที่ไม่ใช่คาบเป็น $X(n) = \lim_{N \to \infty}x_N(n)$
การกำหนดการแปลงฟูเรียร์
$X(\omega ) = \sum_{n=-\infty}^\infty x(n)e^{-jwn}X(K\delta \omega)$
ที่นี่ X (ω) จะถูกสุ่มตัวอย่างเป็นระยะ ๆ ทุกช่วงเรเดียน
เนื่องจาก X (ω) เป็นระยะใน2πเรเดียนเราจึงต้องการตัวอย่างในช่วงพื้นฐานเท่านั้น ตัวอย่างจะถูกนำมาหลังจากช่วงเวลาที่เท่ากันในช่วงความถี่0≤ω≤2π ระยะห่างระหว่างช่วงเวลาที่เท่ากันคือ$\delta \omega = \frac{2\pi }{N}k$ เรเดียน.
ตอนนี้กำลังประเมิน $\omega = \frac{2\pi}{N}k$
$X(\frac{2\pi}{N}k) = \sum_{n = -\infty}^\infty x(n)e^{-j2\pi nk/N},$ ... eq (2)
โดยที่ k = 0,1, …… N-1
หลังจากแบ่งย่อยข้างต้นและเปลี่ยนลำดับของการสรุป
$X(\frac{2\pi}{N}k) = \displaystyle\sum\limits_{n = 0}^{N-1}[\displaystyle\sum\limits_{l = -\infty}^\infty x(n-Nl)]e^{-j2\pi nk/N}$ ... eq (3)
$\sum_{l=-\infty}^\infty x(n-Nl) = x_p(n) = a\quad periodic\quad function\quad of\quad period\quad N\quad and\quad its\quad fourier\quad series\quad = \sum_{k = 0}^{N-1}C_ke^{j2\pi nk/N}$
โดยที่ n = 0,1, … .. , N-1; 'p'- ย่อมาจาก periodic entity หรือ function
สัมประสิทธิ์ฟูเรียร์คือ
$C_k = \frac{1}{N}\sum_{n = 0}^{N-1}x_p(n)e^{-j2\pi nk/N}$k = 0,1, …, N-1 ... eq (4)
การเปรียบเทียบสมการ 3 และ 4 เราได้
$NC_k = X(\frac{2\pi}{N}k)$k = 0,1, …, N-1 ... eq (5)
$NC_k = X(\frac{2\pi}{N}k) = X(e^{jw}) = \displaystyle\sum\limits_{n = -\infty}^\infty x_p(n)e^{-j2\pi nk/N}$... eq (6)
จากการขยายชุดฟูเรียร์
$x_p(n) = \frac{1}{N}\displaystyle\sum\limits_{k = 0}^{N-1}NC_ke^{j2\pi nk/N} = \frac{1}{N}\sum_{k = 0}^{N-1}X(\frac{2\pi}{N}k)e^{j2\pi nk/N}$... eq (7)
โดยที่ n = 0,1, …, N-1
ที่นี่เราได้รับสัญญาณเป็นระยะจาก X (ω) $x(n)$ สามารถสกัดได้จาก $x_p(n)$ เฉพาะในกรณีที่ไม่มีนามแฝงในโดเมนเวลา $N\geq L$
N = ระยะเวลาของ $x_p(n)$ L = ระยะเวลาของ $x(n)$
$x(n) = \begin{cases}x_p(n), & 0\leq n\leq N-1\\0, & Otherwise\end{cases}$
การทำแผนที่ทำได้ในลักษณะนี้
คุณสมบัติของ DFT
ความเป็นเส้นตรง
ระบุว่า DFT ของสัญญาณรวมกันเท่ากับผลรวมของ DFT ของแต่ละสัญญาณ ให้เรารับสัญญาณสองตัว x 1 (n) และ x 2 (n) ซึ่ง DFT s คือ X 1 (ω) และ X 2 (ω) ตามลำดับ ดังนั้นถ้า
$x_1(n)\rightarrow X_1(\omega)$และ$x_2(n)\rightarrow X_2(\omega)$
แล้ว $ax_1(n)+bx_2(n)\rightarrow aX_1(\omega)+bX_2(\omega)$
ที่ไหน a และ b คือค่าคงที่
สมมาตร
คุณสมบัติสมมาตรของ DFT สามารถหาได้ในลักษณะเดียวกับที่เราได้รับคุณสมบัติสมมาตร DTFT เรารู้ว่า DFT ของลำดับ x (n) แสดงด้วย X (K) ตอนนี้ถ้า x (n) และ X (K) เป็นลำดับที่มีค่าเชิงซ้อนก็จะแสดงเป็นด้านล่างได้
$x(n) = x_R(n)+jx_1(n),0\leq n\leq N-1$
และ $X(K) = X_R(K)+jX_1(K),0\leq K\leq N-1$
คุณสมบัติคู่
ให้เราพิจารณาสัญญาณ x (n) ซึ่ง DFT ได้รับเป็น X (K) ให้ลำดับระยะเวลา จำกัด เป็น X (N) จากนั้นตามทฤษฎีบทความเป็นคู่
ถ้า, $x(n)\longleftrightarrow X(K)$
จากนั้น $X(N)\longleftrightarrow Nx[((-k))_N]$
ดังนั้นโดยการใช้ทฤษฎีบทนี้ถ้าเรารู้ DFT เราสามารถค้นหาลำดับระยะเวลา จำกัด ได้อย่างง่ายดาย
คุณสมบัติคอนจูเกตที่ซับซ้อน
สมมติว่ามีสัญญาณ x (n) ซึ่ง DFT รู้จักกันในชื่อ X (K) ตอนนี้ถ้าคอนจูเกตที่ซับซ้อนของสัญญาณถูกกำหนดให้เป็น x * (n) เราสามารถค้นหา DFT ได้อย่างง่ายดายโดยไม่ต้องคำนวณมากโดยใช้ทฤษฎีบทที่แสดงด้านล่าง
ถ้า, $x(n)\longleftrightarrow X(K)$
จากนั้น $x*(n)\longleftrightarrow X*((K))_N = X*(N-K)$
การเปลี่ยนความถี่แบบวงกลม
การคูณของลำดับ x (n) ด้วยลำดับเลขชี้กำลังที่ซับซ้อน $e^{j2\Pi kn/N}$เทียบเท่ากับการเลื่อนแบบวงกลมของ DFT โดยหน่วย L ในความถี่ นี่คือคุณสมบัติการเปลี่ยนเวลาแบบคู่เป็นวงกลม
ถ้า, $x(n)\longleftrightarrow X(K)$
จากนั้น $x(n)e^{j2\Pi Kn/N}\longleftrightarrow X((K-L))_N$
การคูณสองลำดับ
หากมีสัญญาณสองสัญญาณ x 1 (n) และ x 2 (n) และ DFT ตามลำดับคือ X 1 (k) และ X 2 (K) การคูณสัญญาณตามลำดับเวลาจะสอดคล้องกับการแปลงแบบวงกลมของ DFT
ถ้า, $x_1(n)\longleftrightarrow X_1(K)\quad\&\quad x_2(n)\longleftrightarrow X_2(K)$
จากนั้น $x_1(n)\times x_2(n)\longleftrightarrow X_1(K)© X_2(K)$
ทฤษฎีบทของ Parseval
สำหรับลำดับค่าที่ซับซ้อน x (n) และ y (n) โดยทั่วไป
ถ้า, $x(n)\longleftrightarrow X(K)\quad \&\quad y(n)\longleftrightarrow Y(K)$
จากนั้น $\sum_{n = 0}^{N-1}x(n)y^*(n) = \frac{1}{N}\sum_{k = 0}^{N-1}X(K)Y^*(K)$
เรารู้ว่าเมื่อ $\omega = 2\pi K/N$ และ $N\rightarrow \infty,\omega$ กลายเป็นตัวแปรต่อเนื่องและผลรวมขีด จำกัด จะกลายเป็น $-\infty$ ถึง $+\infty$.
ดังนั้น,
$$NC_k = X(\frac{2\pi}{N}k) = X(e^{j\omega}) = \displaystyle\sum\limits_{n = -\infty}^\infty x(n)e^{\frac{-j2\pi nk}{N}} = \displaystyle\sum\limits_{n = -\infty}^\infty x(n)e^{-j\omega n}$$การแปลงฟูริเยร์แบบไม่ต่อเนื่อง (DTFT)
เรารู้ว่า, $X(e^{j\omega}) = \sum_{n = -\infty}^\infty x(n)e^{-j\omega n}$
ที่ไหน $X(e^{j\omega})$มีความต่อเนื่องและเป็นระยะในωและมีคาบ2π … eq (1)
ตอนนี้
$x_p(n) = \sum_{k = 0}^{N-1}NC_ke^{j2 \pi nk/N}$ …จากอนุกรมฟูริเยร์
$x_p(n) = \frac{1}{2\pi}\sum_{k=0}^{N-1}NC_ke^{j2\pi nk/N}\times \frac{2\pi}{N}$
ωกลายเป็นแบบต่อเนื่องและ $\frac{2\pi}{N}\rightarrow d\omega$เนื่องจากเหตุผลที่อ้างถึงข้างต้น
$x(n) = \frac{1}{2\pi}\int_{n = 0}^{2\pi}X(e^{j\omega})e^{j\omega n}d\omega$… eq (2)
การแปลงฟูเรียร์เวลาไม่ต่อเนื่องผกผัน
ในเชิงสัญลักษณ์
$x(n)\Longleftrightarrow x(e^{j\omega})$(คู่ Fourier Transform)
เงื่อนไขที่จำเป็นและเพียงพอสำหรับการคงอยู่ของการแปลงฟูริเยร์แบบไม่ต่อเนื่องสำหรับลำดับที่ไม่ใช่คาบ x (n) นั้นสามารถสรุปได้แน่นอน
กล่าวคือ$\sum_{n = -\infty}^\infty|x(n)|<\infty$
คุณสมบัติของ DTFT
Linearity : $a_1x_1(n)+a_2x_2(n)\Leftrightarrow a_1X_1(e^{j\omega})+a_2X_2(e^{j\omega})$
Time shifting - $x(n-k)\Leftrightarrow e^{-j\omega k}.X(e^{j\omega})$
Time Reversal - $x(-n)\Leftrightarrow X(e^{-j\omega})$
Frequency shifting - $e^{j\omega _0n}x(n)\Leftrightarrow X(e^{j(\omega -\omega _0)})$
Differentiation frequency domain - $nx(n) = j\frac{d}{d\omega}X(e^{j\omega})$
Convolution - $x_1(n)*x_2(n)\Leftrightarrow X_1(e^{j\omega})\times X_2(e^{j\omega})$
Multiplication - $x_1(n)\times x_2(n)\Leftrightarrow X_1(e^{j\omega})*X_2(e^{j\omega})$
Co-relation - $y_{x_1\times x_2}(l)\Leftrightarrow X_1(e^{j\omega})\times X_2(e^{j\omega})$
Modulation theorem - $x(n)\cos \omega _0n = \frac{1}{2}[X_1(e^{j(\omega +\omega _0})*X_2(e^{jw})$
Symmetry -$x^*(n)\Leftrightarrow X^*(e^{-j\omega})$ ;
$x^*(-n)\Leftrightarrow X^*(e^{j\omega})$ ;
$Real[x(n)]\Leftrightarrow X_{even}(e^{j\omega})$ ;
$Imag[x(n)]\Leftrightarrow X_{odd}(e^{j\omega})$ ;
$x_{even}(n)\Leftrightarrow Real[x(e^{j\omega})]$ ;
$x_{odd}(n)\Leftrightarrow Imag[x(e^{j\omega})]$ ;
Parseval’s theorem - $\sum_{-\infty}^\infty|x_1(n)|^2 = \frac{1}{2\pi}\int_{-\pi}^{\pi}|X_1(e^{j\omega})|^2d\omega$
ก่อนหน้านี้เราศึกษาการสุ่มตัวอย่างในโดเมนความถี่ ด้วยความรู้พื้นฐานนั้นเราจึงเป็นตัวอย่าง$X(e^{j\omega})$ในโดเมนความถี่เพื่อให้สามารถทำการวิเคราะห์แบบดิจิทัลได้อย่างสะดวกจากข้อมูลตัวอย่างนั้น ดังนั้น DFT จึงถูกสุ่มตัวอย่างทั้งในโดเมนเวลาและความถี่ ด้วยสมมติฐาน$x(n) = x_p(n)$
ดังนั้น DFT จึงถูกกำหนดโดย -
$X(k) = DFT[x(n)] = X(\frac{2\pi}{N}k) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)e^{-\frac{j2\pi nk}{N}}$, k = 0,1, …., N − 1 … eq (3)
และ IDFT มอบให้โดย -
$X(n) = IDFT[X(k)] = \frac{1}{N}\sum_{k = 0}^{N-1}X(k)e^{\frac{j2\pi nk}{N}}$, n = 0,1, …., N − 1 … eq (4)
$\therefore x(n)\Leftrightarrow X(k)$
ปัจจัย Twiddle
มันแสดงเป็น $W_N$ และกำหนดเป็น $W_N = e^{-j2\pi /N}$. ขนาดของมันยังคงอยู่ที่ความสามัคคีเสมอ เฟสของ$W_N = -2\pi /N$. เป็นเวกเตอร์บนวงกลมหน่วยและใช้เพื่อความสะดวกในการคำนวณ ในทางคณิตศาสตร์สามารถแสดงเป็น -
$W_N^r = W_N^{r\pm N} = W_N^{r\pm 2N} = ...$
มันเป็นฟังก์ชันของ r และจุด N
พิจารณา N = 8, r = 0,1,2,3, … .14,15,16, ….
$\Longleftrightarrow W_8^0 = W_8^8 = W_8^{16} = ... = ... = W_8^{32} = ... =1= 1\angle 0$
$W_8^1 = W_8^9 = W_8^{17} = ... = ... = W_8^{33} = ... =\frac{1}{\sqrt 2}= j\frac{1}{\sqrt 2} = 1\angle-\frac{\pi}{4}$
การแปลงเชิงเส้น
ให้เราเข้าใจการแปลงเชิงเส้น -
เรารู้ว่า,
$DFT(k) = DFT[x(n)] = X(\frac{2\pi}{N}k) = \sum_{n = 0}^{N-1}x(n).W_n^{-nk};\quad k = 0,1,….,N−1$
$x(n) = IDFT[X(k)] = \frac{1}{N}\sum_{k = 0}^{N-1}X(k).W_N^{-nk};\quad n = 0,1,….,N−1$
Note- การคำนวณ DFT สามารถทำได้ด้วยการคูณเชิงซ้อนN 2และการบวกแบบซับซ้อน N (N-1)
$x_N = \begin{bmatrix}x(0)\\x(1)\\.\\.\\x(N-1) \end{bmatrix}\quad N\quad point\quad vector\quad of\quad signal\quad x_N$
$X_N = \begin{bmatrix}X(0)\\X(1)\\.\\.\\X(N-1) \end{bmatrix}\quad N\quad point\quad vector\quad of\quad signal\quad X_N$
$\begin{bmatrix}1 & 1 & 1 & ... & ... & 1\\1 & W_N & W_N^2 & ... & ... & W_N^{N-1}\\. & W_N^2 & W_N^4 & ... & ... & W_N^{2(N-1)}\\.\\1 & W_N^{N-1} & W_N^{2(N-1)} & ... & ... & W_N^{(N-1)(N-1)} \end{bmatrix}$
N - point DFT ในเมทริกซ์กำหนดโดย - $X_N = W_Nx_N$
$W_N\longmapsto$ เมทริกซ์ของการแปลงเชิงเส้น
$Now,\quad x_N = W_N^{-1}X_N$
IDFT ในรูปแบบ Matrix กำหนดโดย
$$x_N = \frac{1}{N}W_N^*X_N$$เปรียบเทียบทั้งสองนิพจน์ของ $x_N,\quad W_N^{-1} = \frac{1}{N}W_N^*$ และ $W_N\times W_N^* = N[I]_{N\times N}$
ดังนั้น, $W_N$ คือเมทริกซ์การแปลงเชิงเส้นเมทริกซ์มุมฉาก (รวมกัน)
จากทรัพย์สินเป็นงวดของ $W_N$ และจากคุณสมบัติสมมาตรสรุปได้ว่า $W_N^{k+N/2} = -W_N^k$
สมมาตรแบบวงกลม
N-point DFT ของระยะเวลา จำกัด x (n) ของความยาวN≤Lเทียบเท่ากับ N-point DFT ของส่วนขยายเป็นระยะของ x (n) นั่นคือ $x_p(n)$ ของช่วงเวลา N. และ $x_p(n) = \sum_{l = -\infty}^\infty x(n-Nl)$. ตอนนี้ถ้าเราเลื่อนลำดับซึ่งเป็นลำดับคาบโดยหน่วย k ไปทางขวาจะได้ลำดับระยะอื่น สิ่งนี้เรียกว่า Circular shift และสิ่งนี้กำหนดโดย
$$x_p^\prime (n) = x_p(n-k) = \sum_{l = -\infty}^\infty x(n-k-Nl)$$ลำดับ จำกัด ใหม่สามารถแสดงเป็น
$$x_p^\prime (n) = \begin{cases}x_p^\prime(n), & 0\leq n\leq N-1\\0 & Otherwise\end{cases}$$Example - ให้ x (n) = {1,2,4,3}, N = 4,
$x_p^\prime (n) = x(n-k,modulo\quad N)\equiv x((n-k))_N\quad;ex-if\quad k=2i.e\quad 2\quad unit\quad right\quad shift\quad and\quad N = 4,$
ถือว่าทิศทางตามเข็มนาฬิกาเป็นทิศทางบวก
เราได้ $x\prime(n) = x((n-2))_4$
$x\prime(0) = x((-2))_4 = x(2) = 4$
$x\prime(1) = x((-1))_4 = x(3) = 3$
$x\prime(2) = x((-2))_4 = x(0) = 1$
$x\prime(3) = x((1))_4 = x(1) = 2$
Conclusion - การเลื่อนแบบวงกลมของลำดับจุด N เทียบเท่ากับการเลื่อนเชิงเส้นของส่วนขยายระยะเวลาและในทางกลับกัน
ลำดับแบบวงกลมสม่ำเสมอ - $x(N-n) = x(n),\quad 1\leq n\leq N-1$
$i.e.x_p(n) = x_p(-n) = x_p(N-n)$
ผันแม้ -$x_p(n) = x_p^*(N-n)$
ลำดับคี่แบบวงกลม - $x(N-n) = -x(n),\quad 1\leq n\leq N-1$
$i.e.x_p(n) = -x_p(-n) = -x_p(N-n)$
ผันคี่ - $x_p(n) = -x_p^*(N-n)$
ตอนนี้ $x_p(n) = x_{pe}+x_{po}(n)$, ที่ไหน,
$x_{pe}(n) = \frac{1}{2}[x_p(n)+x_p^*(N-n)]$
$x_{po}(n) = \frac{1}{2}[x_p(n)-x_p^*(N-n)]$
สำหรับสัญญาณจริง x (n)$X(k) = X^*(N-k)$
$X_R(k) = X_R(N-k)$
$X_l(k) = -X_l(N-k)$
$\angle X(k) = -\angle X(N-K)$
Time reversal- การย้อนกลับของกลุ่มตัวอย่างเกี่ยวกับ 0 THตัวอย่าง ให้เป็น;
$x((-n))_N = x(N-n),\quad 0\leq n\leq N-1$
การย้อนเวลาคือการวางแผนตัวอย่างของลำดับในทิศทางตามเข็มนาฬิกาเช่นสมมติว่าเป็นทิศทางเชิงลบ
คุณสมบัติที่สำคัญอื่น ๆ
คุณสมบัติ IDFT ที่สำคัญอื่น ๆ $x(n)\longleftrightarrow X(k)$
Time reversal - $x((-n))_N = x(N-n)\longleftrightarrow X((-k))_N = X(N-k)$
Circular time shift - $x((n-l))_N \longleftrightarrow X(k)e^{j2\pi lk/N}$
Circular frequency shift - $x(n)e^{j2\pi ln/N} \longleftrightarrow X((k-l))_N$
Complex conjugate properties -
$x^*(n)\longleftrightarrow X^*((-k))_N = X^*(N-k)\quad and$
$x^*((-n))_N = x^*(N-n)\longleftrightarrow X^*(-k)$
Multiplication of two sequence -
$x_1(n)\longleftrightarrow X_1(k)\quad and\quad x_2(n)\longleftrightarrow X_2(k)$
$\therefore x_1(n)x_2(n)\longleftrightarrow X_1(k)\quadⓃ X_2(k)$
Circular convolution - และการคูณสอง DFT
$x_1(k)\quad Ⓝ x_2(k) =\sum_{k = 0}^{N-1}x_1(n).x_2((m-n))_n,\quad m = 0,1,2,... .,N-1 $
$x_1(k)\quad Ⓝ x_2(k)\longleftrightarrow X_1(k).X_2(k)$
Circular correlation - ถ้า $x(n)\longleftrightarrow X(k)$ และ $y(n)\longleftrightarrow Y(k)$ จากนั้นมีลำดับสหสัมพันธ์ข้ามที่แสดงเป็น $\bar Y_{xy}$ ดังนั้น $\bar Y_{xy}(l) = \sum_{n = 0}^{N-1}x(n)y^*((n-l))_N = X(k).Y^*(k)$
Parseval’s Theorem - ถ้า $x(n)\longleftrightarrow X(k)$ และ $y(n)\longleftrightarrow Y(k)$;
$\displaystyle\sum\limits_{n = 0}^{N-1}x(n)y^*(n) = \frac{1}{N}\displaystyle\sum\limits_{n =0}^{N-1}X(k).Y^*(k)$
ให้เราใช้ลำดับระยะเวลา จำกัด สองลำดับ x 1 (n) และ x 2 (n) โดยมีความยาวจำนวนเต็มเป็น N DFT ของพวกเขาคือ X 1 (K) และ X 2 (K) ตามลำดับซึ่งแสดงไว้ด้านล่าง -
$$X_1(K) = \sum_{n = 0}^{N-1}x_1(n)e^{\frac{j2\Pi kn}{N}}\quad k = 0,1,2...N-1$$ $$X_2(K) = \sum_{n = 0}^{N-1}x_2(n)e^{\frac{j2\Pi kn}{N}}\quad k = 0,1,2...N-1$$ตอนนี้เราจะพยายามหา DFT ของลำดับอื่น x 3 (n) ซึ่งกำหนดให้เป็น X 3 (K)
$X_3(K) = X_1(K)\times X_2(K)$
โดยการรับ IDFT ข้างต้นเราจะได้รับ
$x_3(n) = \frac{1}{N}\displaystyle\sum\limits_{n = 0}^{N-1}X_3(K)e^{\frac{j2\Pi kn}{N}}$
หลังจากแก้สมการข้างต้นในที่สุดเราก็ได้
$x_3(n) = \displaystyle\sum\limits_{m = 0}^{N-1}x_1(m)x_2[((n-m))_N]\quad m = 0,1,2...N-1$
| จุดเปรียบเทียบ | การแปลงเชิงเส้น | การแปลงแบบวงกลม |
|---|---|---|
| ขยับ | การขยับเชิงเส้น | การขยับแบบวงกลม |
| ตัวอย่างในผลลัพธ์ Convolution | $N_1+N_2−1$ | $Max(N_1,N_2)$ |
| การค้นหาการตอบสนองของตัวกรอง | เป็นไปได้ | เป็นไปได้โดยไม่มีช่องว่างภายใน |
วิธีการแปลงแบบวงกลม
โดยทั่วไปมีสองวิธีซึ่งถูกนำมาใช้เพื่อดำเนินการ Convolution แบบวงกลมและคือ -
- วิธีวงกลมศูนย์กลาง
- วิธีการคูณเมทริกซ์
วิธีวงกลมศูนย์กลาง
ปล่อย $x_1(n)$ และ $x_2(n)$เป็นสองลำดับที่กำหนด ขั้นตอนตามมาสำหรับการวนรอบของ$x_1(n)$ และ $x_2(n)$ คือ
ใช้วงกลมสองวง พล็อต N ตัวอย่างของ$x_1(n)$ บนเส้นรอบวงของวงกลมด้านนอก (รักษาจุดต่อเนื่องระยะทางเท่ากัน) ในทิศทางทวนเข็มนาฬิกา
สำหรับการวางพล็อต $x_2(n)$พล็อต N ตัวอย่างของ $x_2(n)$ในทิศทางตามเข็มนาฬิกาบนวงกลมด้านในตัวอย่างเริ่มต้นวางไว้ที่จุดเดียวกับ 0 THตัวอย่าง$x_1(n)$
คูณตัวอย่างที่เกี่ยวข้องในสองวงกลมแล้วเพิ่มเพื่อให้ได้ผลลัพธ์
หมุนวงกลมด้านในทวนเข็มนาฬิกาทีละตัวอย่าง
วิธีการคูณเมทริกซ์
วิธีเมทริกซ์แสดงถึงสองลำดับที่กำหนด $x_1(n)$ และ $x_2(n)$ ในรูปแบบเมทริกซ์
หนึ่งในลำดับที่กำหนดจะถูกทำซ้ำโดยการเลื่อนแบบวงกลมของตัวอย่างทีละหนึ่งครั้งเพื่อสร้างเมทริกซ์ NXN
ลำดับอื่นจะแสดงเป็นเมทริกซ์คอลัมน์
การคูณของเมทริกซ์สองตัวให้ผลลัพธ์ของการแปลงแบบวงกลม
DFT ให้แนวทางอื่นในการแปลงโดเมนเวลา สามารถใช้เพื่อทำการกรองเชิงเส้นในโดเมนความถี่
ด้วยประการฉะนี้$Y(\omega) = X(\omega).H(\omega)\longleftrightarrow y(n)$.
ปัญหาในแนวทางโดเมนความถี่นี้คือ $Y(\omega)$, $X(\omega)$ และ $H(\omega)$เป็นฟังก์ชันต่อเนื่องของωซึ่งไม่เกิดผลสำหรับการคำนวณดิจิทัลบนคอมพิวเตอร์ อย่างไรก็ตาม DFT ให้รูปแบบตัวอย่างของรูปคลื่นเหล่านี้เพื่อแก้ปัญหาวัตถุประสงค์
ข้อดีคือการมีความรู้เกี่ยวกับเทคนิค DFT ที่เร็วกว่าเช่น FFT ทำให้สามารถพัฒนาอัลกอริทึมที่มีประสิทธิภาพในการคำนวณสูงขึ้นสำหรับการคำนวณคอมพิวเตอร์ดิจิทัลเมื่อเทียบกับวิธีโดเมนเวลา
พิจารณาลำดับระยะเวลาที่ จำกัด $[x(n) = 0,\quad for,n<0\quad and\quad n\geq L]$ (สมการทั่วไป) กระตุ้นตัวกรองเชิงเส้นด้วยการตอบสนองของแรงกระตุ้น $[h(n) = 0,\quad forn<0\quad and\quad n\geq M]$.
$$x(n)y(n)$$ $$output = y(n) = \sum_{k = 0}^{M-1}h(k).x(n-k)$$จากการวิเคราะห์ Convolution เป็นที่ชัดเจนว่าระยะเวลาของ y (n) คือ L + M − 1
ในโดเมนความถี่
$$Y(\omega) = X(\omega).H(\omega)$$ตอนนี้ $Y(\omega)$ เป็นฟังก์ชันต่อเนื่องของωและสุ่มตัวอย่างที่ชุดของความถี่ที่ไม่ต่อเนื่องพร้อมด้วยจำนวนตัวอย่างที่แตกต่างกันซึ่งจะต้องเท่ากับหรือเกิน $L+M-1$.
$$DFT\quad size = N\geq L+M-1$$ด้วย $\omega = \frac{2\pi}{N}k$,
$Y(\omega) = X(k).H(k)$โดยที่ k = 0,1, …., N-1
โดยที่ X (k) และ H (k) คือ N-point DFTs ของ x (n) และ h (n) ตามลำดับ $x(n)\& h(n)$ ถูกบุด้วยศูนย์จนถึงความยาว N มันจะไม่บิดเบือนสเปกตรัมต่อเนื่อง $X(\omega)$ และ $H(\omega)$. ตั้งแต่$N\geq L+M-1$, N-point DFT ของลำดับเอาต์พุต y (n) เพียงพอที่จะแสดง y (n) ในโดเมนความถี่และข้อเท็จจริงเหล่านี้อนุมานได้ว่าการคูณของ N-point DFTs ของ X (k) และ H (k) ตามด้วยการคำนวณ ของ N-point IDFT ต้องให้ y (n)
นี่หมายความว่าการ Convolution วงกลม N จุดของ x (n) และ H (n) ที่มีช่องว่างภายในเป็นศูนย์เท่ากับการแปลงเชิงเส้นของ x (n) และ h (n)
ดังนั้น DFT สามารถใช้สำหรับการกรองเชิงเส้น
Caution - N ควรมากกว่าหรือเท่ากับเสมอ $L+M-1$. มิฉะนั้นเอฟเฟกต์นามแฝงจะทำให้ลำดับเอาต์พุตเสียหาย
สมมติว่าลำดับอินพุต x (n) ของระยะเวลาที่ยาวนานจะถูกประมวลผลด้วยระบบที่มีการตอบสนองอิมพัลส์ระยะเวลา จำกัด โดยการเชื่อมโยงสองลำดับ เนื่องจากการกรองเชิงเส้นที่ดำเนินการผ่าน DFT เกี่ยวข้องกับการดำเนินการกับบล็อกข้อมูลขนาดคงที่ลำดับการป้อนข้อมูลจะถูกแบ่งออกเป็นบล็อกข้อมูลขนาดคงที่ต่างกันก่อนการประมวลผล
จากนั้นบล็อกต่อเนื่องจะถูกประมวลผลทีละบล็อกและผลลัพธ์จะถูกรวมเข้าด้วยกันเพื่อสร้างผลลัพธ์สุทธิ
เนื่องจากการ Convolution ดำเนินการโดยการแบ่งลำดับการป้อนข้อมูลแบบยาวออกเป็นส่วนขนาดคงที่ต่างกันจึงเรียกว่าการแปลงแบบแบ่งส่วน ลำดับการป้อนข้อมูลแบบยาวจะแบ่งเป็นบล็อกขนาดคงที่ก่อนการประมวลผลตัวกรอง FIR
ใช้สองวิธีในการประเมิน Convolution แบบไม่ต่อเนื่อง -
Overlap-save method
Overlap-add method
วิธีการบันทึกทับซ้อนกัน
Overlap – save เป็นชื่อดั้งเดิมสำหรับวิธีที่มีประสิทธิภาพในการประเมิน Convolution แบบไม่ต่อเนื่องระหว่างสัญญาณที่ยาวมาก x (n) และฟิลเตอร์การตอบสนองอิมพัลส์ จำกัด (FIR) h (n) ด้านล่างนี้เป็นขั้นตอนของวิธีการบันทึกทับซ้อนกัน -
ให้ความยาวของบล็อกข้อมูลอินพุต = N = L + M-1 ดังนั้น DFT และ IDFT length = N แต่ละบล็อกข้อมูลมีจุดข้อมูล M-1 ของบล็อกก่อนหน้าตามด้วยจุดข้อมูลใหม่ L เพื่อสร้างลำดับข้อมูลของความยาว N = L + M-1
ขั้นแรกให้คำนวณ N-point DFT สำหรับแต่ละบล็อกข้อมูล
ด้วยการต่อท้ายศูนย์ (L-1) การตอบสนองแรงกระตุ้นของฟิลเตอร์ FIR จะเพิ่มความยาวและ N จุด DFT จะถูกคำนวณและจัดเก็บ
การคูณของสองจุด N-point DFTs H (k) และ X m (k): Y ′ m (k) = H (k) .X m (k) โดยที่ K = 0,1,2, … N-1
จากนั้น IDFT [Y ′ m ((k)] = y′ ((n) = [y ′ m (0), y′ m (1), y ′ m (2), ....... y ′ ม. (M-1), y′ ม. (M), ....... y ′ ม. (N-1)]
(ที่นี่ N-1 = L + M-2)
จุด M-1 แรกเสียหายเนื่องจากการใช้นามแฝงดังนั้นจึงถูกทิ้งเนื่องจากบันทึกข้อมูลมีความยาว N
จุด L สุดท้ายจะเหมือนกับผลของการแปลงดังนั้น
y ′ m (n) = y m (n) โดยที่ n = M, M + 1, … .N-1
เพื่อหลีกเลี่ยงการ aliasing, M-1 ที่ผ่านมาองค์ประกอบของแต่ละระเบียนข้อมูลจะถูกบันทึกและจุดเหล่านี้ดำเนินการส่งต่อไปยังระเบียนตามมาและกลายเป็น 1 เซนต์ M-1 องค์ประกอบ

ผลลัพธ์ของ IDFT โดยที่จุด M-1 แรกถูกหลีกเลี่ยงเพื่อทำให้นามแฝงเป็นโมฆะและจุด L ที่เหลือจะทำให้ได้ผลลัพธ์ที่ต้องการเหมือนกับการแปลงเชิงเส้น
ซ้อนทับวิธีการเพิ่ม
ด้านล่างนี้เป็นขั้นตอนในการค้นหา Convolution แบบไม่ต่อเนื่องโดยใช้วิธี Overlap -
ให้ขนาดบล็อกข้อมูลอินพุตเป็น L ดังนั้นขนาดของ DFT และ IDFT: N = L + M-1
แต่ละบล็อกข้อมูลจะต่อท้ายด้วยเลขศูนย์ M-1 ต่อท้าย
คำนวณ N-point DFT
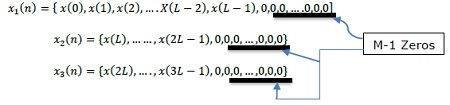
คูณ N-point DFT สองจุด: Y m (k) = H (k) .X m (k) โดยที่ k = 0,, 1,2, …., N-1
IDFT [Y m (k)] สร้างบล็อกที่มีความยาว N ซึ่งไม่ได้รับผลกระทบจากการใช้นามแฝงเนื่องจากขนาดของ DFT คือ N = L + M-1 และเพิ่มความยาวของลำดับไปยังจุด N โดยการผนวกเลขศูนย์ M-1 เข้ากับแต่ละจุด บล็อก.
คะแนน M-1 สุดท้ายของแต่ละบล็อกจะต้องทับซ้อนกันและเพิ่มไปยังจุด M-1 แรกของบล็อกที่สำเร็จ
(เหตุผล: แต่ละบล็อกข้อมูลจะสิ้นสุดด้วยศูนย์ M-1)
ดังนั้นวิธีนี้จึงเรียกว่าวิธีการเพิ่มการซ้อนทับ ดังนั้นเราจึงได้รับ -
y (n) = {y 1 (0), y 1 (1), y 1 (2), … .. , y 1 (L-1), y 1 (L) + y 2 (0), y 1 (L + 1) + y 2 (1), ... … .. , y 1 (N-1) + y 2 (M-1), y 2 (M), … .. . ... ... ... }
DCT (การแปลงโคไซน์แบบไม่ต่อเนื่อง) คือลำดับอินพุต N x (n), 0≤n≤N-1 เป็นการแปลงเชิงเส้นหรือการรวมกันของเลขชี้กำลังที่ซับซ้อน เป็นผลให้ค่าสัมประสิทธิ์ DFT โดยทั่วไปมีความซับซ้อนแม้ว่า x (n) จะเป็นจริง
สมมติว่าเราพยายามค้นหาการแปลงมุมฉากซึ่งมีโครงสร้าง N × N ที่แสดงลำดับจริง x (n) เป็นการรวมเชิงเส้นของลำดับโคไซน์ เรารู้แล้วว่า -
$X(K) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)cos\frac{2\Pi kn}{N}0\leq k \leq N-1$
และ $x(n) = \frac{1}{N}\sum_{k = 0}^{N-1}x(k)cos\frac{2\Pi kn}{N}0\leq k \leq N-1$
เป็นไปได้ถ้าลำดับจุด N x (n) เป็นจริงและสม่ำเสมอ ด้วยประการฉะนี้$x(n) = x(N-n),0\leq n \leq (N-1)$. DFT ที่ได้นั้นเป็นของจริงและสม่ำเสมอ สิ่งเหล่านี้ทำให้ชัดเจนว่าเราสามารถหาอุปกรณ์การแปลงโคไซน์แบบไม่ต่อเนื่องสำหรับลำดับจริง N จุดใดก็ได้โดยการใช้ DFT จุด 2N ของ "ส่วนขยายคู่" ของลำดับ
โดยพื้นฐานแล้ว DCT ใช้ในการประมวลผลภาพและคำพูด นอกจากนี้ยังใช้ในการบีบอัดภาพและสัญญาณเสียงพูด
$DFT[s(n)] = S(k) = \sum_{n = 0}^{2N-1}s(n)W_{2N}^{nk},\quad where\quad 0\leq k \leq 2N-1$
$S(k) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)W_{2N}^{nk}+\displaystyle\sum\limits_{n = N}^{2N-1}x(2N-n-1)W_{2N}^{nk};\quad where\quad 0\leq k\leq 2N-1$
$\Rightarrow S(k) = W_{2N}^{-k/2}+\sum_{n = 0}^{N-1}x(n) [W_{2N}^{nk}W_{2N}^{k/2}+W_{2N}^{-nk}W_{2N}^{-k/2}];\quad where\quad 0\leq k\leq 2N-1$
$\Rightarrow S(k) = W_{2N}^{\frac{k}{2}}\sum_{n = 0}^{N-1}x(n)\cos [\frac{\pi}{N}(n+\frac{1}{2})k];\quad where\quad 0\leq k\leq 2N-1$
DCT ถูกกำหนดโดย
$V(k) = 2\sum_{n = 0}^{N-1}x(n)\cos [\frac{\pi}{2}(n+\frac{1}{2})k]\quad where\quad 0\leq k\leq N-1$
$\Rightarrow V(k) = W_{2N}^{\frac{k}{2}}S(k)\quad or\quad S(k) = W_{2N}^{\frac{k}{2}}V(k),\quad where\quad 0\leq k\leq N-1$
$\Rightarrow V(k) = 2R[W_{2N}^{\frac{k}{2}}\sum_{n = 0}^{N-1}x(n)W_{2N}^{nk}],\quad where\quad 0\leq k\leq N-1$
ตัวอย่าง 1
ตรวจสอบทฤษฎีบทของลำดับของ Parseval $x(n) = \frac{1^n}{4}u(n)$
Solution - $\displaystyle\sum\limits_{-\infty}^\infty|x_1(n)|^2 = \frac{1}{2\pi}\int_{-\pi}^{\pi}|X_1(e^{j\omega})|^2d\omega$
LHS $\displaystyle\sum\limits_{-\infty}^\infty|x_1(n)|^2$
$= \displaystyle\sum\limits_{-\infty}^{\infty}x(n)x^*(n)$
$= \displaystyle\sum\limits_{-\infty}^\infty(\frac{1}{4})^{2n}u(n) = \frac{1}{1-\frac{1}{16}} = \frac{16}{15}$
RHS $X(e^{j\omega}) = \frac{1}{1-\frac{1}{4}e-j\omega} = \frac{1}{1-0.25\cos \omega+j0.25\sin \omega}$
$\Longleftrightarrow X^*(e^{j\omega}) = \frac{1}{1-0.25\cos \omega-j0.25\sin \omega}$
การคำนวณ $X(e^{j\omega}).X^*(e^{j\omega})$
$= \frac{1}{(1-0.25\cos \omega)^2+(0.25\sin \omega)^2} = \frac{1}{1.0625-0.5\cos \omega}$
$\frac{1}{2\pi}\int_{-\pi}^{\pi}\frac{1}{1.0625-0.5\cos \omega}d\omega$
$\frac{1}{2\pi}\int_{-\pi}^{\pi}\frac{1}{1.0625-0.5\cos \omega}d\omega = 16/15$
เราจะเห็นว่า LHS = RHS (จึงพิสูจน์แล้ว)
ตัวอย่าง 2
คำนวณ N-point DFT ของ $x(n) = 3\delta (n)$
Solution - เรารู้ว่า
$X(K) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)e^{\frac{j2\Pi kn}{N}}$
$= \displaystyle\sum\limits_{n = 0}^{N-1}3\delta(n)e^{\frac{j2\Pi kn}{N}}$
$ = 3\delta (0)\times e^0 = 1$
ดังนั้น,$x(k) = 3,0\leq k\leq N-1$…ตอบ
ตัวอย่างที่ 3
คำนวณ N-point DFT ของ $x(n) = 7(n-n_0)$
Solution - เรารู้ว่า
$X(K) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)e^{\frac{j2\Pi kn}{N}}$
แทนที่ค่าของ x (n)
$\displaystyle\sum\limits_{n = 0}^{N-1}7\delta (n-n_0)e^{-\frac{j2\Pi kn}{N}}$
$= e^{-kj14\Pi kn_0/N}$…ตอบ
ในวิธีการ DFT ก่อนหน้านี้เราพบว่าส่วนการคำนวณยาวเกินไป เราต้องการลดสิ่งนั้น ซึ่งสามารถทำได้ผ่าน FFT หรือการแปลงฟูเรียร์อย่างรวดเร็ว ดังนั้นเราสามารถพูดได้ว่า FFT ไม่ใช่อะไรนอกจากการคำนวณการแปลงฟูริเยร์แบบไม่ต่อเนื่องในรูปแบบอัลกอริทึมซึ่งส่วนการคำนวณจะลดลง
ข้อได้เปรียบหลักของการมี FFT คือเราสามารถออกแบบฟิลเตอร์ FIR ได้ด้วยวิธีนี้ ในทางคณิตศาสตร์ FFT สามารถเขียนได้ดังนี้
$$x[K] = \displaystyle\sum\limits_{n = 0}^{N-1}x[n]W_N^{nk}$$ให้เรานำตัวอย่างเพื่อทำความเข้าใจให้ดีขึ้น เราได้พิจารณาแปดจุดที่ตั้งชื่อจาก$x_0\quad to\quad x_7$. เราจะเลือกคำที่เป็นคู่ในกลุ่มหนึ่งและคำที่แปลกในอีกกลุ่มหนึ่ง มุมมองแผนภาพดังกล่าวข้างต้นได้แสดงไว้ด้านล่าง -
ที่นี่คะแนน x 0 , x 2 , x 4และ x 6ถูกจัดกลุ่มเป็นหมวดหมู่เดียวและในทำนองเดียวกันคะแนน x 1 , x 3 , x 5และ x 7ถูกจัดอยู่ในหมวดหมู่อื่น ตอนนี้เราสามารถทำให้มันเป็นกลุ่มสองกลุ่มและสามารถดำเนินการคำนวณต่อไปได้ ตอนนี้ให้เราดูว่าการแบ่งออกเป็นสองส่วนเพิ่มเติมช่วยในการคำนวณอย่างไร
$x[k] = \displaystyle\sum\limits_{r = 0}^{\frac{N}{2}-1}x[2r]W_N^{2rk}+\displaystyle\sum\limits_{r = 0}^{\frac{N}{2}-1}x[2r+1]W_N^{(2r+1)k}$
$= \sum_{r = 0}^{\frac{N}{2}-1}x[2r]W_{N/2}^{rk}+\sum_{r = 0}^{\frac{N}{2}-1}x[2r+1]W_{N/2}^{rk}\times W_N^k$
$= G[k]+H[k]\times W_N^k$
เริ่มแรกเราใช้ลำดับแปดจุด แต่ต่อมาเราแบ่งส่วนนั้นออกเป็นสองส่วน G [k] และ H [k] G [k] ย่อมาจากส่วนคู่ในขณะที่ H [k] ย่อมาจากส่วนคี่ หากเราต้องการทราบผ่านแผนภาพก็สามารถแสดงได้ดังต่อไปนี้ -
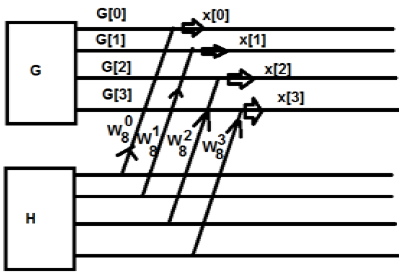
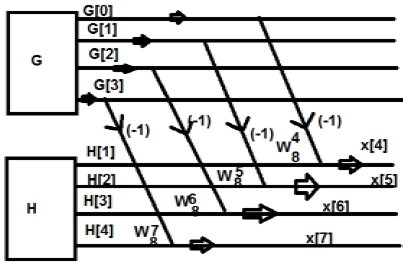
จากรูปด้านบนเราจะเห็นว่า
$W_8^4 = -1$
$W_8^5 = -W_8^1$
$W_8^6 = -W_8^2$
$W_8^7 = -W_8^3$
ในทำนองเดียวกันค่าสุดท้ายสามารถเขียนได้ดังนี้ -
$G[0]-H[0] = x[4]$
$G[1]-W_8^1H[1] = x[5]$
$G[2]-W_8^2H[2] = x[6]$
$G[1]-W_8^3H[3] = x[7]$
หนึ่งข้างต้นเป็นอนุกรมเป็นระยะ ข้อเสียของระบบนี้คือ K ไม่สามารถหักเกิน 4 จุดได้ ตอนนี้ให้เราแบ่งข้างต้นเป็นเพิ่มเติม เราจะได้โครงสร้างประมาณนี้
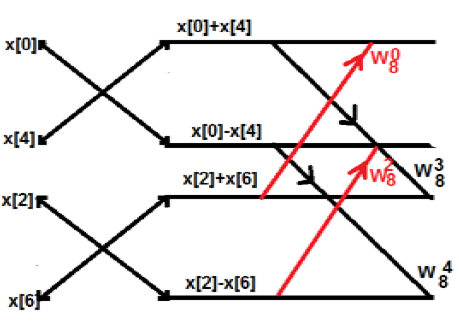
ตัวอย่าง
พิจารณาลำดับ x [n] = {2,1, -1, -3,0,1,2,1} คำนวณ FFT
Solution - ลำดับที่กำหนดคือ x [n] = {2,1, -1, -3,0,1,2,1}
จัดเรียงเงื่อนไขตามที่แสดงด้านล่าง
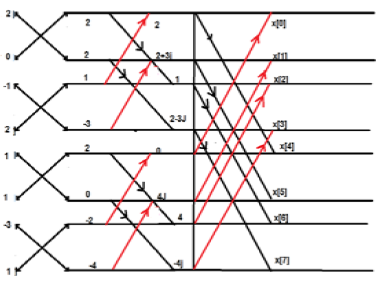
การใช้หน่วยความจำอย่างมีประสิทธิภาพนี้เป็นสิ่งสำคัญสำหรับการออกแบบฮาร์ดแวร์ที่รวดเร็วเพื่อคำนวณ FFT คำว่าการคำนวณแบบแทนที่ใช้เพื่ออธิบายการใช้หน่วยความจำนี้
การลดลงตามลำดับเวลา
ในโครงสร้างนี้เราแสดงจุดทั้งหมดในรูปแบบไบนารีเช่นใน 0 และ 1 จากนั้นเราจะย้อนกลับโครงสร้างเหล่านั้น ลำดับที่เราได้รับหลังจากนั้นเรียกว่าลำดับการกลับรายการบิต สิ่งนี้เรียกอีกอย่างว่าการสลายตัวตามลำดับเวลา การคำนวณแบบแทนที่ของ DFT แปดจุดจะแสดงในรูปแบบตารางดังที่แสดงด้านล่าง -
| คะแนน | รูปแบบไบนารี | REVERSAL | คะแนนเทียบเท่า |
|---|---|---|---|
| 0 | 000 | 000 | 0 |
| 1 | 001 | 100 | 4 |
| 2 | 010 | 010 | 2 |
| 3 | 011 | 110 | 6 |
| 4 | 100 | 001 | 1 |
| 5 | 101 | 101 | 5 |
| 6 | 110 | 011 | 3 |
| 7 | 111 | 111 | 7 |
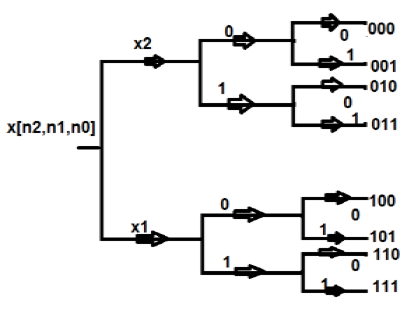
การลดลงในลำดับความถี่
นอกเหนือจากลำดับเวลาแล้วยังสามารถแสดงลำดับจุด N เป็นความถี่ได้อีกด้วย ให้เราใช้ลำดับสี่จุดเพื่อทำความเข้าใจให้ดีขึ้น
ให้ลำดับเป็น $x[0], x[1], x[2], x[3], x[4], x[5], x[6], x[7]$. เราจะจับกลุ่มสองจุดเป็นกลุ่มเดียวในตอนแรก ในทางคณิตศาสตร์ลำดับนี้สามารถเขียนเป็น;
$$x[k] = \sum_{n = 0}^{N-1}x[n]W_N^{n-k}$$ตอนนี้ให้เราสร้างกลุ่มของลำดับหมายเลข 0 ถึง 3 กลุ่มหนึ่งและอีกกลุ่มของลำดับที่ 4 ถึง 7 ตอนนี้ในทางคณิตศาสตร์สามารถแสดงเป็น;
$$\displaystyle\sum\limits_{n = 0}^{\frac{N}{2}-1}x[n]W_N^{nk}+\displaystyle\sum\limits_{n = N/2}^{N-1}x[n]W_N^{nk}$$ให้เราแทนที่ n ด้วย r โดยที่ r = 0, 1, 2 …. (N / 2-1) ในทางคณิตศาสตร์
$$\displaystyle\sum\limits_{n = 0}^{\frac{N}{2}-1}x[r]W_{N/2}^{nr}$$เราใช้สี่จุดแรก (x [0], x [1], x [2], x [3]) ในตอนแรกและพยายามแทนค่าทางคณิตศาสตร์ดังนี้ -
$\sum_{n = 0}^3x[n]W_8^{nk}+\sum_{n = 0}^3x[n+4]W_8^{(n+4)k}$
$= \lbrace \sum_{n = 0}^3x[n]+\sum_{n = 0}^3x[n+4]W_8^{(4)k}\rbrace \times W_8^{nk}$
ตอนนี้ $X[0] = \sum_{n = 0}^3(X[n]+X[n+4])$
$X[1] = \sum_{n = 0}^3(X[n]+X[n+4])W_8^{nk}$
$= [X[0]-X[4]+(X[1]-X[5])W_8^1+(X[2]-X[6])W_8^2+(X[3]-X[7])W_8^3$
เราสามารถแบ่งมันออกเป็นสองส่วนได้อีกซึ่งหมายความว่าแทนที่จะแบ่งเป็นลำดับ 4 จุดเราสามารถแบ่งมันออกเป็นลำดับ 2 จุดได้
ฟิลเตอร์ FIR มีประโยชน์ในการออกแบบฟิลเตอร์โดยใช้คอมพิวเตอร์ช่วย ให้เราดูตัวอย่างและดูว่ามันทำงานอย่างไร ให้ด้านล่างเป็นรูปของตัวกรองที่ต้องการ

ในขณะที่ทำการออกแบบคอมพิวเตอร์เราแบ่งตัวเลขกราฟต่อเนื่องทั้งหมดออกเป็นค่าที่ไม่ต่อเนื่อง ภายในขอบเขตที่กำหนดเราแบ่งออกเป็น 64, 256 หรือ 512 (และอื่น ๆ ) จำนวนชิ้นส่วนที่มีขนาดไม่ต่อเนื่อง
ในตัวอย่างข้างต้นเราได้กำหนดขีด จำกัด ระหว่าง-πถึง + π เราได้แบ่งออกเป็น 256 ส่วน จุดสามารถแสดงเป็น H (0), H (1), …. สูงถึง H (256) ที่นี่เราใช้อัลกอริทึม IDFT และสิ่งนี้จะทำให้เรามีลักษณะเฟสเชิงเส้น
บางครั้งเราอาจสนใจลำดับตัวกรองบางอย่าง ขอให้เราบอกว่าเราต้องการที่จะตระหนักถึงข้างต้นการออกแบบได้รับถึง 9 THกรองการสั่งซื้อ ดังนั้นเราจึงใช้ค่าตัวกรองเป็น h0, h1, h2 … .h9 ในทางคณิตศาสตร์แสดงได้ดังต่อไปนี้
$$H(e^{j\omega}) = h_0+h_1e^{-j\omega}+h_2e^{-2j\omega}+.....+h_9e^{-9j\omega}$$ในกรณีที่มีความคลาดเคลื่อนจำนวนมากเราจะได้คะแนนสูงสุด
ตัวอย่างเช่นในรูปด้านบนมีการลดลงอย่างกะทันหันระหว่างจุด B และ C ดังนั้นเราจึงพยายามหาค่าที่ไม่ต่อเนื่องมากขึ้น ณ จุดนี้ แต่มีความชันคงที่ระหว่างจุด C และ D ที่นั่นเราใช้เวลา จำนวนค่าที่ไม่ต่อเนื่องน้อยลง
สำหรับการออกแบบตัวกรองด้านบนเราต้องผ่านขั้นตอนการย่อขนาดดังนี้
$H(e^{j\omega1}) = h_0+h_1e^{-j\omega1}+h_2e^{-2j\omega1}+.....+h_9e^{-9j\omega1}$
$H(e^{j\omega2}) = h_0+h_1e^{-j\omega2}+h_2e^{-2j\omega2}+.....+h_9e^{-9j\omega2}$
ในทำนองเดียวกัน
$(e^{j\omega1000}) = h_0+h_1eH^{-j\omega1000}h_2e^{-2j\omega1000}+.....+h_9+e^{-9j\omega1000}$
แทนสมการข้างต้นในรูปแบบเมทริกซ์เรามี -
$$\begin{bmatrix}H(e^{j\omega_1})\\.\\.\\H(e^{j\omega_{1000}}) \end{bmatrix} = \begin{bmatrix}e^{-j\omega_1} & ... & e^{-j9\omega_1} \\. & & . \\. & & . \\e^{-j\omega_{1000}} &... & e^{j9\omega_{1000}} \end{bmatrix}\begin{bmatrix}h_0\\.\\.\\h_9\end{bmatrix}$$ให้เราใช้เมทริกซ์ 1000 × 1 เป็นเมทริกซ์ B, 1000 × 9 เป็นเมทริกซ์ A และ 9 × 1 เป็น $\hat{h}$.
ดังนั้นสำหรับการแก้เมทริกซ์ข้างต้นเราจะเขียน
$\hat{h} = [A^TA]^{-1}A^{T}B$
$= [A^{*T}A]^{-1}A^{*T}B$
โดยที่ A *แสดงถึงคอนจูเกตที่ซับซ้อนของเมทริกซ์ A