Xử lý tín hiệu kỹ thuật số - Hướng dẫn nhanh
Định nghĩa
Bất cứ thứ gì mang thông tin đều có thể được gọi là tín hiệu. Nó cũng có thể được định nghĩa là một đại lượng vật lý thay đổi theo thời gian, nhiệt độ, áp suất hoặc với bất kỳ biến độc lập nào như tín hiệu giọng nói hoặc tín hiệu video.
Quá trình hoạt động trong đó các đặc tính của tín hiệu (Biên độ, hình dạng, pha, tần số, v.v.) trải qua một sự thay đổi được gọi là quá trình xử lý tín hiệu.
Note- Bất kỳ tín hiệu không mong muốn nào can thiệp vào tín hiệu chính được gọi là nhiễu. Vì vậy, nhiễu cũng là một tín hiệu nhưng không mong muốn.
Theo cách biểu diễn và xử lý của chúng, các tín hiệu có thể được phân loại thành nhiều loại khác nhau, chi tiết sẽ được thảo luận dưới đây.
Tín hiệu thời gian liên tục
Tín hiệu thời gian liên tục được xác định dọc theo một chu kỳ thời gian và do đó, được biểu diễn bằng một biến độc lập liên tục. Tín hiệu thời gian liên tục thường được gọi là tín hiệu tương tự.
Loại tín hiệu này thể hiện tính liên tục cả về biên độ và thời gian. Các giá trị này sẽ có giá trị tại mỗi thời điểm. Các hàm sin và côsin là ví dụ tốt nhất về Tín hiệu thời gian liên tục.
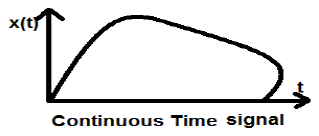
Tín hiệu được hiển thị ở trên là một ví dụ về tín hiệu thời gian liên tục vì chúng ta có thể nhận được giá trị của tín hiệu tại mỗi thời điểm.
Tín hiệu thời gian rời rạc
Các tín hiệu, được xác định tại các thời điểm rời rạc được gọi là tín hiệu rời rạc. Do đó, mọi biến độc lập đều có giá trị khác biệt. Do đó, chúng được biểu diễn dưới dạng một dãy số.
Mặc dù tín hiệu giọng nói và video có đặc quyền được biểu diễn ở cả định dạng thời gian liên tục và rời rạc; trong những trường hợp nhất định, chúng giống hệt nhau. Biên độ cũng cho thấy các đặc tính rời rạc. Ví dụ hoàn hảo về điều này là một tín hiệu kỹ thuật số; mà cả hai biên độ và thời gian đều rời rạc.
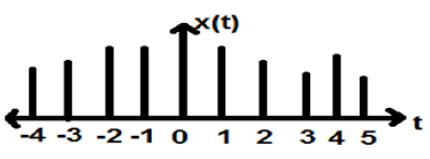
Hình trên mô tả đặc tính biên độ rời rạc của một tín hiệu rời rạc trong một khoảng thời gian. Về mặt toán học, những loại tín hiệu này có thể được công thức hóa thành;
$$x = \left \{ x\left [ n \right ] \right \},\quad -\infty < n< \infty$$Trong đó, n là một số nguyên.
Nó là một dãy số x, trong đó số thứ n trong dãy được biểu diễn là x [n].
Để kiểm tra một hệ thống, thông thường, các tín hiệu tiêu chuẩn hoặc cơ bản được sử dụng. Những tín hiệu này là những khối xây dựng cơ bản cho nhiều tín hiệu phức tạp. Do đó, chúng đóng một vai trò rất quan trọng trong việc nghiên cứu các tín hiệu và hệ thống.
Unit Impulse hoặc Delta Function
Một tín hiệu, thỏa mãn điều kiện, $\delta(t) = \lim_{\epsilon \to \infty} x(t)$được gọi là tín hiệu xung đơn vị. Tín hiệu này có xu hướng đến vô cùng khi t = 0 và có xu hướng về 0 khi t ≠ 0 sao cho diện tích dưới đường cong của nó luôn bằng một. Hàm delta có biên độ bằng 0 ở mọi nơi excunit_impulse.jpgept tại t = 0.

Thuộc tính của tín hiệu xung đơn vị
- δ (t) là tín hiệu chẵn.
- δ (t) là một ví dụ về tín hiệu không năng lượng và công suất (NENP).
- Vùng của tín hiệu xung đơn vị có thể được viết là; $$A = \int_{-\infty}^{\infty} \delta (t)dt = \int_{-\infty}^{\infty} \lim_{\epsilon \to 0} x(t) dt = \lim_{\epsilon \to 0} \int_{-\infty}^{\infty} [x(t)dt] = 1$$
- Trọng lượng hoặc cường độ của tín hiệu có thể được viết là; $$y(t) = A\delta (t)$$
- Vùng của tín hiệu xung có trọng số có thể được viết là: $$y (t) = \int_{-\infty}^{\infty} y (t)dt = \int_{-\infty}^{\infty} A\delta (t) = A[\int_{-\infty}^{\infty} \delta (t)dt ] = A = 1 = Wigthedimpulse$$
Tín hiệu bước đơn vị
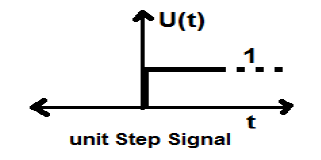
Một tín hiệu, thỏa mãn hai điều kiện sau:
- $U(t) = 1(when\quad t \geq 0 )and$
- $U(t) = 0 (when\quad t < 0 )$
được gọi là tín hiệu bước đơn vị.
Nó có đặc tính thể hiện sự gián đoạn tại t = 0. Tại điểm không liên tục, giá trị tín hiệu được cho bằng giá trị trung bình của tín hiệu. Tín hiệu này đã được thực hiện ngay trước và sau điểm gián đoạn (theo Hiện tượng của Gibb).
Nếu chúng ta thêm một tín hiệu bước vào một tín hiệu bước khác được chia tỷ lệ thời gian, thì kết quả sẽ là sự thống nhất. Đây là tín hiệu loại công suất và giá trị của công suất là 0,5. Giá trị RMS (Bình phương trung bình gốc) là 0,707 và giá trị trung bình của nó cũng là 0,5
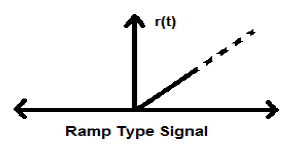
Tín hiệu đường dốc
Tích hợp tín hiệu bước dẫn đến tín hiệu Ramp. Nó được biểu diễn bởi r (t). Tín hiệu đường dốc cũng thỏa mãn điều kiện$r(t) = \int_{-\infty}^{t} U(t)dt = tU(t)$. Nó không phải là tín hiệu loại năng lượng cũng không phải nguồn (NENP).
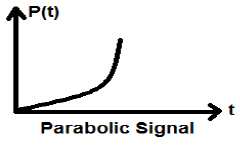
Tín hiệu Parabol
Tích hợp tín hiệu Ramp dẫn đến tín hiệu parabol. Nó được biểu diễn bằng p (t). Tín hiệu parabol cũng thỏa mãn điều kiện anh ta$p(t) = \int_{-\infty}^{t} r(t)dt = (t^{2}/2)U(t)$. Nó không phải là năng lượng cũng không phải là tín hiệu loại Nguồn (NENP).
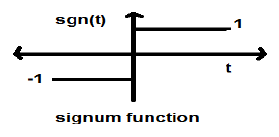
Hàm Signum
Chức năng này được biểu diễn dưới dạng
$$sgn(t) = \begin{cases}1 & for\quad t >0\\-1 & for\quad t<0\end{cases}$$Nó là một loại tín hiệu nguồn. Giá trị công suất của nó và giá trị RMS (bình phương trung bình gốc), cả hai đều là 1. Giá trị trung bình của hàm dấu hiệu bằng không.
Hàm Sinc
Nó cũng là một hàm của sin và được viết là -
$$SinC(t) = \frac{Sin\Pi t}{\Pi T} = Sa(\Pi t)$$Thuộc tính của hàm Sinc
Đó là một tín hiệu dạng năng lượng.
$Sinc(0) = \lim_{t \to 0}\frac{\sin \Pi t}{\Pi t} = 1$
$Sinc(\infty) = \lim_{t \to \infty}\frac{\sin \Pi \infty}{\Pi \infty} = 0$ (Phạm vi sinπ∞ thay đổi trong khoảng từ -1 đến +1 nhưng bất kỳ giá trị nào chia cho vô cùng đều bằng 0)
-
Nếu $ \sin c(t) = 0 => \sin \Pi t = 0$
$\Rightarrow \Pi t = n\Pi$
$\Rightarrow t = n (n \neq 0)$
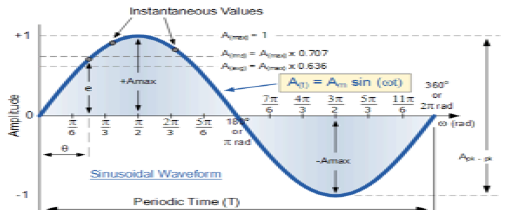
Tín hiệu hình sin
Một tín hiệu, có bản chất liên tục được gọi là tín hiệu liên tục. Định dạng chung của tín hiệu hình sin là
$$x(t) = A\sin (\omega t + \phi )$$Đây,
A = biên độ của tín hiệu
ω = Tần số góc của tín hiệu (Được đo bằng radian)
φ = Góc pha của tín hiệu (Được đo bằng radian)
Xu hướng của tín hiệu này là tự lặp lại sau một khoảng thời gian nhất định, do đó được gọi là tín hiệu tuần hoàn. Khoảng thời gian của tín hiệu được cho là;
$$T = \frac{2\pi }{\omega }$$Hình chiếu biểu đồ của tín hiệu hình sin được hiển thị bên dưới.
Chức năng hình chữ nhật
Một tín hiệu được cho là dạng hàm hình chữ nhật nếu nó thỏa mãn điều kiện sau:
$$\pi(\frac{t}{\tau}) = \begin{cases}1, & for\quad t\leq \frac{\tau}{2}\\0, & Otherwise\end{cases}$$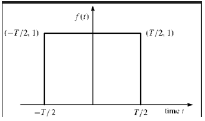
Đối xứng về trục Y, tín hiệu này được gọi là tín hiệu chẵn.
Tín hiệu xung tam giác
Bất kỳ tín hiệu nào thỏa mãn điều kiện sau được gọi là tín hiệu tam giác.
$$\Delta(\frac{t}{\tau}) = \begin{cases}1-(\frac{2|t|}{\tau}) & for|t|<\frac{\tau}{2}\\0 & for|t|>\frac{\tau}{2}\end{cases}$$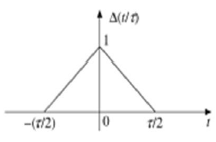
Tín hiệu này là đối xứng về trục Y. Do đó, nó còn được gọi là tín hiệu chẵn.
Chúng ta đã thấy rằng các tín hiệu cơ bản có thể được biểu diễn như thế nào trong miền thời gian liên tục. Hãy để chúng tôi xem các tín hiệu cơ bản có thể được biểu diễn như thế nào trong Miền thời gian rời rạc.
Trình tự xung đơn vị
Nó được ký hiệu là δ (n) trong miền thời gian rời rạc và có thể được định nghĩa là;
$$\delta(n)=\begin{cases}1, & for \quad n=0\\0, & Otherwise\end{cases}$$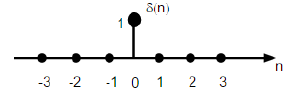
Tín hiệu bước đơn vị
Tín hiệu bước đơn vị thời gian rời rạc được định nghĩa là;
$$U(n)=\begin{cases}1, & for \quad n\geq0\\0, & for \quad n<0\end{cases}$$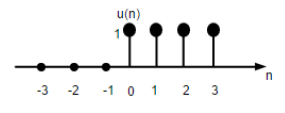
Hình trên cho thấy biểu diễn đồ họa của một hàm bước rời rạc.
Chức năng Đơn vị Ramp
Một hàm dốc đơn vị rời rạc có thể được định nghĩa là -
$$r(n)=\begin{cases}n, & for \quad n\geq0\\0, & for \quad n<0\end{cases}$$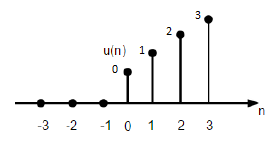
Hình trên cho thấy biểu diễn đồ họa của tín hiệu đường dốc rời rạc.
Hàm Parabol
Hàm parabol đơn vị rời rạc được ký hiệu là p (n) và có thể được định nghĩa là;
$$p(n) = \begin{cases}\frac{n^{2}}{2} ,& for \quad n\geq0\\0, & for \quad n<0\end{cases}$$Về chức năng bước đơn vị, nó có thể được viết là;
$$P(n) = \frac{n^{2}}{2}U(n)$$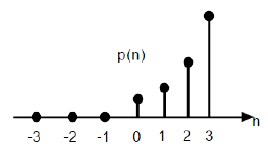
Hình trên cho thấy biểu diễn đồ họa của một chuỗi parabol.
Tín hiệu hình sin
Tất cả các tín hiệu thời gian liên tục là định kỳ. Các chuỗi hình sin thời gian rời rạc có thể có hoặc không tuần hoàn. Chúng phụ thuộc vào giá trị của ω. Để tín hiệu thời gian rời rạc có tính tuần hoàn, tần số góc ω phải là bội số hữu tỉ của 2π.
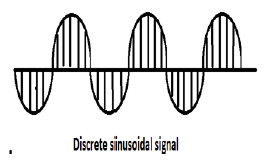
Một tín hiệu hình sin rời rạc được thể hiện trong hình trên.
Dạng rời rạc của tín hiệu hình sin có thể được biểu diễn ở định dạng -
$$x(n) = A\sin(\omega n + \phi)$$Ở đây A, ω và φ có nghĩa thông thường và n là số nguyên. Khoảng thời gian của tín hiệu hình sin rời rạc được cho bởi:
$$N =\frac{2\pi m}{\omega}$$Trong đó, N và m là các số nguyên.
Các tín hiệu thời gian liên tục có thể được phân loại theo các điều kiện hoặc hoạt động khác nhau được thực hiện trên các tín hiệu.
Tín hiệu chẵn và lẻ
Tín hiệu đồng đều
Một tín hiệu được cho là ngay cả khi nó thỏa mãn điều kiện sau;
$$x(-t) = x(t)$$Sự đảo ngược thời gian của tín hiệu không ngụ ý bất kỳ sự thay đổi nào về biên độ ở đây. Ví dụ, hãy xem xét sóng tam giác được hiển thị bên dưới.
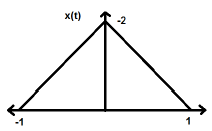
Tín hiệu tam giác là tín hiệu chẵn. Kể từ, nó đối xứng về trục Y. Có thể nói đó là hình ảnh phản chiếu về trục Y.
Hãy xem xét một tín hiệu khác như thể hiện trong hình bên dưới.
Chúng ta có thể thấy rằng tín hiệu trên là đồng đều vì nó đối xứng về trục Y.
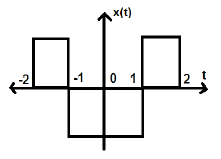
Tín hiệu kỳ lạ
Một tín hiệu được cho là kỳ lạ, nếu nó thỏa mãn điều kiện sau
$$x(-t) = -x(t)$$Ở đây, cả sự đảo ngược thời gian và sự thay đổi biên độ diễn ra đồng thời.
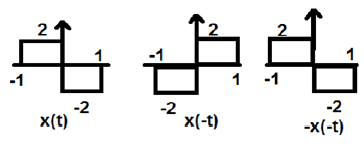
Trong hình trên, chúng ta có thể thấy một tín hiệu bước x (t). Để kiểm tra xem đó có phải là tín hiệu lẻ hay không, đầu tiên chúng ta thực hiện đảo ngược thời gian tức là x (-t) và kết quả như hình bên. Sau đó, chúng tôi đảo ngược biên độ của tín hiệu kết quả tức là –x (-t) và chúng tôi nhận được kết quả như trong hình.
Nếu chúng ta so sánh dạng sóng thứ nhất và thứ ba, chúng ta có thể thấy rằng chúng giống nhau, tức là x (t) = -x (-t), thỏa mãn tiêu chí của chúng ta. Do đó, tín hiệu trên là tín hiệu Lẻ.
Một số kết quả quan trọng liên quan đến tín hiệu chẵn và lẻ được đưa ra dưới đây.
- Even × Even = Even
- Odd × Odd = Chẵn
- Chẵn × Lẻ = Lẻ
- Chẵn ± Chẵn = Chẵn
- Odd ± Odd = Odd
- Chẵn ± Lẻ = Không chẵn cũng không lẻ
Biểu diễn bất kỳ tín hiệu nào thành dạng chẵn hoặc lẻ
Một số tín hiệu không thể được phân loại trực tiếp thành loại chẵn hoặc lẻ. Chúng được biểu diễn dưới dạng sự kết hợp của cả tín hiệu chẵn và lẻ.
$$x(t)\rightarrow x_{e}(t)+x_{0}(t)$$Trong đó x e (t) đại diện cho tín hiệu chẵn và x o (t) đại diện cho tín hiệu lẻ
$$x_{e}(t)=\frac{[x(t)+x(-t)]}{2}$$Và
$$x_{0}(t)=\frac{[x(t)-x(-t)]}{2}$$Thí dụ
Tìm phần chẵn và phần lẻ của tín hiệu $x(n) = t+t^{2}+t^{3}$
Solution - Từ đảo ngược x (n), ta được
$$x(-n) = -t+t^{2}-t^{3}$$
Bây giờ, theo công thức, phần chẵn
$$x_{e}(t) = \frac{x(t)+x(-t)}{2}$$
$$= \frac{[(t+t^{2}+t^{3})+(-t+t^{2}-t^{3})]}{2}$$
$$= t^{2}$$
Tương tự, theo công thức, phần lẻ là
$$x_{0}(t)=\frac{[x(t)-x(-t)]}{2}$$
$$= \frac{[(t+t^{2}+t^{3})-(-t+t^{2}-t^{3})]}{2}$$
$$= t+t^{3}$$
Tín hiệu định kỳ và không định kỳ
Tín hiệu định kỳ
Tín hiệu định kỳ tự lặp lại sau một khoảng thời gian nhất định. Chúng ta có thể hiển thị điều này dưới dạng phương trình là:
$$x(t) = x(t)\pm nT$$Trong đó, n = một số nguyên (1,2,3 ……)
T = Khoảng thời gian cơ bản (FTP) ≠ 0 và ≠ ∞
Khoảng thời gian cơ bản (FTP) là giá trị dương và cố định nhỏ nhất của thời gian mà tín hiệu là định kỳ.
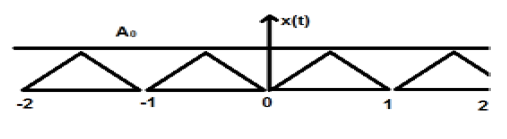
Một tín hiệu hình tam giác được thể hiện trong hình trên với biên độ A. Ở đây, tín hiệu được lặp lại sau mỗi 1 giây. Do đó, chúng ta có thể nói rằng tín hiệu là định kỳ và FTP của nó là 1 giây.
Tín hiệu không định kỳ
Đơn giản, chúng ta có thể nói, các tín hiệu không tuần hoàn có bản chất là không tuần hoàn. Rõ ràng, những tín hiệu này sẽ không lặp lại sau bất kỳ khoảng thời gian nào.
Các tín hiệu không tuần hoàn không theo một định dạng nhất định; do đó, không có phương trình toán học cụ thể nào có thể mô tả chúng.
Tín hiệu năng lượng và công suất
Một tín hiệu được cho là tín hiệu Năng lượng, nếu và chỉ khi, tổng năng lượng chứa là hữu hạn và khác không (0 <E <∞). Do đó, đối với bất kỳ tín hiệu dạng năng lượng nào, tổng tín hiệu chuẩn hóa là hữu hạn và khác không.
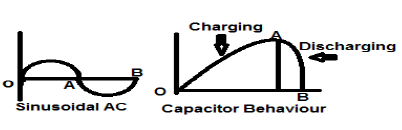
Tín hiệu dòng điện xoay chiều hình sin là một ví dụ hoàn hảo về tín hiệu loại Năng lượng vì nó ở nửa chu kỳ dương trong một trường hợp và sau đó là âm trong nửa chu kỳ tiếp theo. Do đó, công suất trung bình của nó trở thành không.
Tụ điện không mất mát cũng là một ví dụ hoàn hảo về tín hiệu kiểu Năng lượng vì khi nó được kết nối với nguồn, nó sẽ sạc đến mức tối ưu và khi nguồn được tháo ra, nó sẽ tiêu tán lượng năng lượng tương đương đó qua tải và làm cho công suất trung bình của nó số không.
Đối với bất kỳ tín hiệu hữu hạn nào x (t), năng lượng có thể được ký hiệu là E và được viết là;
$$E = \int_{-\infty}^{+\infty} x^{2}(t)dt$$Mật độ phổ của tín hiệu dạng năng lượng cho biết lượng năng lượng được phân bố ở các mức tần số khác nhau.
Tín hiệu loại nguồn
Một tín hiệu được cho là tín hiệu loại công suất, nếu và chỉ khi, công suất trung bình chuẩn hóa là hữu hạn và khác 0 tức là (0 <p <∞). Đối với tín hiệu loại công suất, công suất trung bình chuẩn hóa là hữu hạn và khác không. Hầu hết tất cả các tín hiệu tuần hoàn là tín hiệu công suất và công suất trung bình của chúng là hữu hạn và khác không.
Ở dạng toán học, lũy thừa của tín hiệu x (t) có thể được viết dưới dạng;
$$P = \lim_{T \rightarrow \infty}1/T\int_{-T/2}^{+T/2} x^{2}(t)dt$$Sự khác biệt giữa tín hiệu năng lượng và công suất
Bảng sau đây tóm tắt sự khác biệt của Tín hiệu Năng lượng và Công suất.
| Tín hiệu nguồn | Tín hiệu năng lượng |
|---|---|
| Tín hiệu tuần hoàn thực tế là tín hiệu công suất. | Tín hiệu không tuần hoàn là tín hiệu năng lượng. |
| Ở đây, công suất trung bình chuẩn hóa là hữu hạn và khác 0. | Ở đây, tổng năng lượng chuẩn hóa là hữu hạn và khác không. |
| Về mặt toán học, $$P = \lim_{T \rightarrow \infty}1/T\int_{-T/2}^{+T/2} x^{2}(t)dt$$ |
Về mặt toán học, $$E = \int_{-\infty}^{+\infty} x^{2}(t)dt$$ |
| Sự tồn tại của những tín hiệu này là vô hạn theo thời gian. | Những tín hiệu này tồn tại trong một khoảng thời gian giới hạn. |
| Năng lượng của tín hiệu điện là vô hạn trong thời gian vô hạn. | Công suất của tín hiệu năng lượng bằng không trong thời gian vô hạn. |
Các ví dụ đã giải quyết
Example 1 - Tìm công suất của tín hiệu $z(t) = 2\cos(3\Pi t+30^{o})+4\sin(3\Pi +30^{o})$
Solution- Hai tín hiệu trên trực giao với nhau vì các số hạng tần số của chúng giống nhau và chúng có cùng độ lệch pha. Vì vậy, tổng sức mạnh sẽ là tổng các sức mạnh riêng lẻ.
Để cho $z(t) = x(t)+y(t)$
Ở đâu $x(t) = 2\cos (3\Pi t+30^{o})$ và $y(t) = 4\sin(3\Pi +30^{o})$
Sức mạnh của $x(t) = \frac{2^{2}}{2} = 2$
Sức mạnh của $y(t) = \frac{4^{2}}{2} = 8$
Vì thế, $P(z) = p(x)+p(y) = 2+8 = 10$… Ans.
Example 2 - Kiểm tra xem tín hiệu đã cho $x(t) = t^{2}+j\sin t$ là liên hợp hay không?
Solution- Ở đây, phần thực của t 2 là phần chẵn và phần lẻ (ảo) là$\sin t$là số lẻ. Vậy tín hiệu trên là tín hiệu Conjugate.
Example 3 - Xác minh xem $X(t)= \sin \omega t$ là một tín hiệu lẻ hoặc một tín hiệu chẵn.
Solution - Cho $X(t) = \sin \omega t$
Khi đảo ngược thời gian, chúng ta sẽ nhận được $\sin (-\omega t)$
Nhưng chúng tôi biết rằng $\sin(-\phi) = -\sin \phi$.
Vì thế,
$$\sin (-\omega t) = -\sin \omega t$$Điều này thỏa mãn điều kiện cho một tín hiệu là số lẻ. Vì thế,$\sin \omega t$ là một tín hiệu kỳ quặc.
Cũng giống như tín hiệu thời gian liên tục, tín hiệu thời gian rời rạc có thể được phân loại theo các điều kiện hoặc hoạt động trên tín hiệu.
Tín hiệu chẵn và lẻ
Tín hiệu đồng đều
Một tín hiệu được cho là chẵn hoặc đối xứng nếu nó thỏa mãn điều kiện sau;
$$x(-n) = x(n)$$
Ở đây, chúng ta có thể thấy rằng x (-1) = x (1), x (-2) = x (2) và x (-n) = x (n). Do đó, nó là một tín hiệu chẵn.
Tín hiệu kỳ lạ
Một tín hiệu được cho là lẻ nếu nó thỏa mãn điều kiện sau;
$$x(-n) = -x(n)$$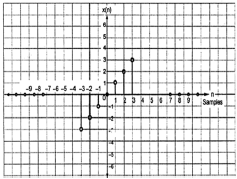
Từ hình vẽ, chúng ta có thể thấy rằng x (1) = -x (-1), x (2) = -x (2) và x (n) = -x (-n). Do đó, nó là một tín hiệu kỳ quặc cũng như phản đối xứng.
Tín hiệu định kỳ và không định kỳ
Tín hiệu thời gian rời rạc là tuần hoàn nếu và chỉ khi, nó thỏa mãn điều kiện sau:
$$x(n+N) = x(n)$$Ở đây, tín hiệu x (n) tự lặp lại sau N khoảng thời gian. Điều này có thể được hiểu rõ nhất bằng cách xem xét một tín hiệu cosine -
$$x(n) = A \cos(2\pi f_{0}n+\theta)$$ $$x(n+N) = A\cos(2\pi f_{0}(n+N)+\theta) = A\cos(2\pi f_{0}n+2\pi f_{0}N+\theta)$$ $$= A\cos(2\pi f_{0}n+2\pi f_{0}N+\theta)$$Để tín hiệu trở nên tuần hoàn, cần thỏa mãn điều kiện sau;
$$x(n+N) = x(n)$$ $$\Rightarrow A\cos(2\pi f_{0}n+2\pi f_{0}N+\theta) = A \cos(2\pi f_{0}n+\theta)$$I E $2\pi f_{0}N$ là bội số tích phân của $2\pi$
$$2\pi f_{0}N = 2\pi K$$ $$\Rightarrow N = \frac{K}{f_{0}}$$Tần số của tín hiệu hình sin rời rạc được phân tách bằng bội số tích phân của $2\pi$.
Tín hiệu năng lượng và công suất
Tín hiệu năng lượng
Năng lượng của một tín hiệu thời gian rời rạc được ký hiệu là E. Về mặt toán học, nó có thể được viết là;
$$E = \displaystyle \sum\limits_{n=-\infty}^{+\infty}|x(n)|^2$$Nếu mỗi giá trị riêng lẻ của $x(n)$được bình phương và thêm vào, chúng tôi nhận được tín hiệu năng lượng. Đây$x(n)$ là tín hiệu năng lượng và năng lượng của nó là hữu hạn theo thời gian tức là $ 0 <E <\ infty $
Tín hiệu nguồn
Công suất trung bình của một tín hiệu rời rạc được biểu thị là P. Về mặt toán học, điều này có thể được viết là;
$$P = \lim_{N \to \infty} \frac{1}{2N+1}\displaystyle\sum\limits_{n=-N}^{+N} |x(n)|^2$$Ở đây, lũy thừa là hữu hạn tức là 0 <P <∞. Tuy nhiên, có một số tín hiệu không thuộc về năng lượng cũng như tín hiệu loại công suất.
Có những tín hiệu khác, là kết quả của hoạt động được thực hiện trên chúng. Một số loại tín hiệu phổ biến được thảo luận dưới đây.
Tín hiệu kết hợp
Tín hiệu thỏa mãn điều kiện $x(t) = x*(-t)$ được gọi là tín hiệu liên hợp.
Để cho $x(t) = a(t)+jb(t)$... eqn. 1
Vì thế, $x(-t) = a(-t)+jb(-t)$
Và $x*(-t) = a(-t)-jb(-t)$... eqn. 2
Theo điều kiện, $x(t) = x*(-t)$
Nếu chúng ta so sánh cả hai phương trình dẫn xuất 1 và 2, chúng ta có thể thấy rằng phần thực là chẵn, trong khi phần ảo là lẻ. Đây là điều kiện để một tín hiệu có dạng liên hợp.
Kết hợp các tín hiệu chống đối xứng
Tín hiệu thỏa mãn điều kiện $x(t) = -x*(-t)$ được gọi là tín hiệu phản đối xứng liên hợp
Để cho $x(t) = a(t)+jb(t)$... eqn. 1
Vì thế $x(-t) = a(-t)+jb(-t)$
Và $x*(-t) = a(-t)-jb(-t)$
$-x*(-t) = -a(-t)+jb(-t)$... eqn. 2
Theo điều kiện $x(t) = -x*(-t)$
Bây giờ, một lần nữa so sánh, cả hai phương trình giống như chúng ta đã làm đối với tín hiệu liên hợp. Ở đây, chúng ta sẽ thấy rằng phần thực là số lẻ và phần ảo là số chẵn. Đây là điều kiện để một tín hiệu trở thành loại phản đối xứng liên hợp.
Thí dụ
Hãy để tín hiệu được đưa ra là $x(t) = \sin t+jt^{2}$.
Đây, phần thực sự là $\sin t$ là kỳ quặc và phần tưởng tượng là $t^2$là thậm chí. Vì vậy, tín hiệu này có thể được phân loại là tín hiệu phản đối xứng liên hợp.
Bất kỳ chức năng nào cũng có thể được chia thành hai phần. Một phần là đối xứng liên hợp và một phần khác là phản đối xứng liên hợp. Vì vậy, bất kỳ tín hiệu x (t) nào có thể được viết dưới dạng
$$x(t) = xcs(t)+xcas(t)$$Ở đâu $xcs(t)$ là tín hiệu đối xứng liên hợp và $xcas(t)$ là tín hiệu phản đối xứng liên hợp
$$xcs(t) = \frac{[x(t)+x*(-t)]}{2}$$Và
$$xcas(t) = \frac{[x(t)-x*(-t)]}{2}$$Tín hiệu đối xứng nửa sóng
Khi một tín hiệu thỏa mãn điều kiện $cx(t) = -x(t\pm (\frac{T_{0}}{2}))$, nó được gọi là tín hiệu đối xứng nửa sóng. Ở đây, sự đảo ngược biên độ và dịch chuyển thời gian của tín hiệu diễn ra trong một nửa thời gian. Đối với tín hiệu đối xứng nửa sóng, giá trị trung bình sẽ bằng 0 nhưng đây không phải là trường hợp đảo ngược tình huống.
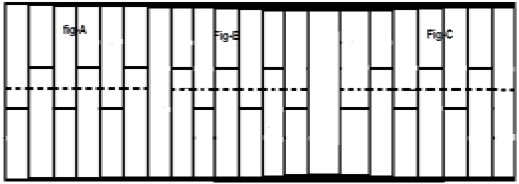
Xét một tín hiệu x (t) như trong hình A ở trên. Bước đầu tiên là thay đổi thời gian tín hiệu và làm cho nó$x[t-(\frac{T}{2})]$. Vì vậy, tín hiệu mới được thay đổi như trong hình B. Tiếp theo, chúng ta đảo ngược biên độ của tín hiệu, tức là làm cho nó$-x[t-(\frac{T}{2})]$ như trong hình C. Vì tín hiệu này lặp lại chính nó sau khi dịch chuyển nửa thời gian và đảo ngược biên độ, nó là tín hiệu đối xứng nửa sóng.
Tín hiệu trực giao
Hai tín hiệu x (t) và y (t) được cho là trực giao nếu chúng thỏa mãn hai điều kiện sau.
Condition 1 - $\int_{-\infty}^{\infty}x(t)y(t) = 0$ [đối với tín hiệu không định kỳ]
Condition 2 - $\int x(t)y(t) = 0$ [Đối với tín hiệu định kỳ]
Các tín hiệu chứa các sóng hài lẻ ( thứ 3 , thứ 5 , thứ 7 ...) và có tần số khác nhau, chúng trực giao với nhau.
Trong các tín hiệu loại lượng giác, hàm sin và hàm cosin cũng trực giao với nhau; miễn là chúng có cùng tần số và cùng pha. Theo cách tương tự, tín hiệu DC (Tín hiệu dòng điện một chiều) và tín hiệu hình sin cũng trực giao với nhau. Nếu x (t) và y (t) là hai tín hiệu trực giao và$z(t) = x(t)+y(t)$ thì lũy thừa và năng lượng của z (t) có thể được viết là;
$$P(z) = p(x)+p(y)$$ $$E(z) = E(x)+E(y)$$Thí dụ
Phân tích tín hiệu: $z(t) = 3+4\sin(2\pi t+30^0)$
Ở đây, tín hiệu bao gồm một tín hiệu DC (3) và một hàm sin. Vì vậy, theo đặc tính, tín hiệu này là một tín hiệu trực giao và hai tín hiệu con trong nó là trực giao lẫn nhau.
Dịch chuyển có nghĩa là chuyển động của tín hiệu, trong miền thời gian (quanh trục Y) hoặc trong miền biên độ (quanh trục X). Theo đó, chúng ta có thể phân loại dịch chuyển thành hai loại có tên là Dịch chuyển thời gian và Dịch chuyển biên độ, chúng sẽ được thảo luận dưới đây.
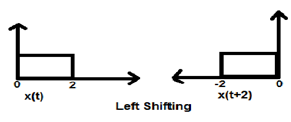
Dịch chuyển thời gian
Dịch chuyển thời gian có nghĩa là, sự dịch chuyển của tín hiệu trong miền thời gian. Về mặt toán học, nó có thể được viết là
$$x(t) \rightarrow y(t+k)$$Giá trị K này có thể là dương hoặc có thể là âm. Theo dấu của giá trị k, chúng ta có hai loại chuyển dịch tên là Chuyển phải và Chuyển trái.
Trường hợp 1 (K> 0)
Khi K lớn hơn 0, sự dịch chuyển của tín hiệu diễn ra về phía "trái" trong miền thời gian. Do đó, loại dịch chuyển này được gọi là dịch chuyển trái của tín hiệu.
Example
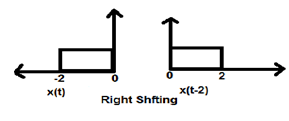
Trường hợp 2 (K <0)
Khi K nhỏ hơn 0, sự dịch chuyển của tín hiệu diễn ra theo hướng sang phải trong miền thời gian. Do đó, kiểu chuyển dịch này được gọi là Chuyển dịch phải.
Example
Hình dưới đây cho thấy sự dịch chuyển sang phải của một tín hiệu bằng 2.
Biên độ dịch chuyển
Dịch chuyển biên độ có nghĩa là sự dịch chuyển của tín hiệu trong miền biên độ (quanh trục X). Về mặt toán học, nó có thể được biểu diễn dưới dạng:
$$x(t) \rightarrow x(t)+K$$Giá trị K này có thể dương hoặc âm. Theo đó, chúng ta có hai loại dịch chuyển biên độ sau đó sẽ được thảo luận dưới đây.
Trường hợp 1 (K> 0)
Khi K lớn hơn 0, sự dịch chuyển của tín hiệu diễn ra theo hướng lên trên trục x. Do đó, kiểu chuyển dịch này được gọi là chuyển dịch hướng lên.
Example
Chúng ta hãy xem xét một tín hiệu x (t) được cho là;
$$x = \begin{cases}0, & t < 0\\1, & 0\leq t\leq 2\\ 0, & t>0\end{cases}$$Chúng ta đã lấy K = + 1 để tín hiệu mới có thể được viết là -
$y(t) \rightarrow x(t)+1$ Vì vậy, y (t) cuối cùng có thể được viết là;
$$x(t) = \begin{cases}1, & t < 0\\2, & 0\leq t\leq 2\\ 1, & t>0\end{cases}$$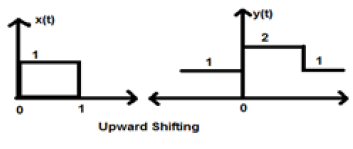
Trường hợp 2 (K <0)
Khi K nhỏ hơn 0, sự dịch chuyển của tín hiệu diễn ra theo hướng đi xuống trong trục X. Do đó, nó được gọi là sự dịch chuyển tín hiệu đi xuống.
Example
Chúng ta hãy xem xét một tín hiệu x (t) được cho là;
$$x(t) = \begin{cases}0, & t < 0\\1, & 0\leq t\leq 2\\ 0, & t>0\end{cases}$$Giả sử chúng ta đã lấy K = -1 để tín hiệu mới có thể được viết là;
$y(t)\rightarrow x(t)-1$ Vì vậy, y (t) cuối cùng có thể được viết là;
$$y(t) = \begin{cases}-1, & t < 0\\0, & 0\leq t\leq 2\\ -1, & t>0\end{cases}$$
Tỷ lệ của một tín hiệu có nghĩa là, một hằng số được nhân với thời gian hoặc biên độ của tín hiệu.
Tỷ lệ thời gian
Nếu một hằng số được nhân với trục thời gian thì nó được gọi là Tỷ lệ thời gian. Điều này có thể được biểu diễn bằng toán học là;
$x(t) \rightarrow y(t) = x(\alpha t)$ hoặc là $x(\frac{t}{\alpha})$; trong đó α ≠ 0
Vì vậy, trục y giống nhau, độ lớn của trục x giảm hoặc tăng theo dấu của hằng số (cho dù dương hay âm). Do đó, tỷ lệ cũng có thể được chia thành hai loại như được thảo luận dưới đây.
Nén thời gian
Bất cứ khi nào alpha lớn hơn 0, biên độ của tín hiệu được chia cho alpha trong khi giá trị của trục Y vẫn giữ nguyên. Điều này được gọi là Nén thời gian.
Example
Chúng ta hãy xem xét một tín hiệu x (t), được hiển thị như trong hình dưới đây. Chúng ta hãy lấy giá trị của alpha là 2. Vì vậy, y (t) sẽ là x (2t), được minh họa trong hình bên.

Rõ ràng, chúng ta có thể thấy từ các hình trên rằng độ lớn thời gian theo trục y không đổi nhưng biên độ theo trục x giảm từ 4 xuống 2. Do đó, nó là trường hợp Nén thời gian.
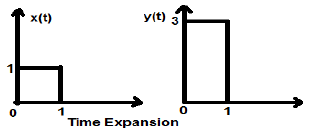
Mở rộng thời gian
Khi thời gian được chia cho hằng số alpha, cường độ trục Y của tín hiệu sẽ nhân với alpha, giữ nguyên độ lớn trục X. Do đó, đây được gọi là tín hiệu kiểu mở rộng thời gian.
Example
Chúng ta hãy xem xét một tín hiệu bình phương x (t), có độ lớn 1. Khi chúng ta chia tỷ lệ thời gian của nó theo một hằng số 3, sao cho $x(t) \rightarrow y(t) \rightarrow x(\frac{t}{3})$, sau đó biên độ của tín hiệu được sửa đổi 3 lần được thể hiện trong hình bên dưới.
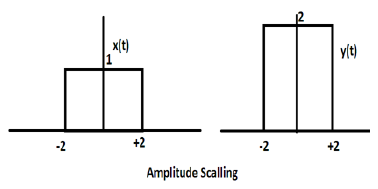
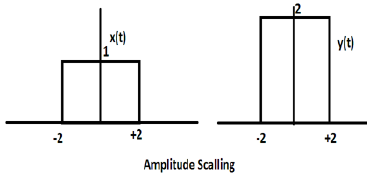
Tỷ lệ biên độ
Nhân của một hằng số với biên độ của tín hiệu gây ra tỷ lệ biên độ. Tùy thuộc vào dấu hiệu của hằng số, nó có thể là tỷ lệ biên độ hoặc suy giảm. Chúng ta hãy xem xét một tín hiệu sóng vuông x (t) = Π (t / 4).
Giả sử chúng ta định nghĩa một hàm khác y (t) = 2 Π (t / 4). Trong trường hợp này, giá trị của trục y sẽ được tăng gấp đôi, giữ nguyên giá trị của trục thời gian. Được minh họa trong hình bên dưới.
Xét một hàm sóng vuông khác được định nghĩa là z (t) trong đó z (t) = 0,5 Π (t / 4). Ở đây, biên độ của hàm z (t) sẽ bằng một nửa của x (t) tức là trục thời gian được giữ nguyên, trục biên độ sẽ giảm đi một nửa. Điều này được minh họa bằng hình dưới đây.
Bất cứ khi nào thời gian trong một tín hiệu được nhân với -1, tín hiệu sẽ bị đảo ngược. Nó tạo ra hình ảnh phản chiếu của nó về trục Y hoặc X. Điều này được gọi là Đảo ngược của tín hiệu.
Đảo chiều có thể được phân thành hai loại dựa trên điều kiện thời gian hoặc biên độ của tín hiệu được nhân với -1.
Đảo ngược thời gian
Bất cứ khi nào thời gian của tín hiệu được nhân với -1, nó được gọi là sự đảo ngược thời gian của tín hiệu. Trong trường hợp này, tín hiệu tạo ra hình ảnh phản chiếu của nó về trục Y. Về mặt toán học, điều này có thể được viết là;
$$x(t) \rightarrow y(t) \rightarrow x(-t)$$Điều này có thể được hiểu rõ nhất qua ví dụ sau.

Trong ví dụ trên, chúng ta có thể thấy rõ rằng tín hiệu đã bị đảo ngược về trục Y của nó. Vì vậy, nó cũng là một loại tỷ lệ thời gian, nhưng ở đây đại lượng tỷ lệ là (-1) luôn luôn.
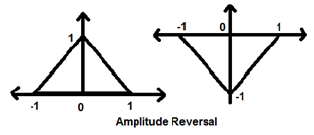
Đảo ngược biên độ
Bất cứ khi nào biên độ của tín hiệu được nhân với -1, thì nó được gọi là sự đảo ngược biên độ. Trong trường hợp này, tín hiệu tạo ra hình ảnh phản chiếu của nó về trục X. Về mặt toán học, điều này có thể được viết là;
$$x(t)\rightarrow y(t)\rightarrow -x(t)$$Hãy xem xét ví dụ sau. Có thể thấy rõ sự đảo ngược biên độ.
Hai hoạt động rất quan trọng được thực hiện trên các tín hiệu là Khác biệt hóa và Tích hợp.
Sự khác biệt
Sự khác biệt của bất kỳ tín hiệu x (t) nào có nghĩa là biểu diễn độ dốc của tín hiệu đó theo thời gian. Về mặt toán học, nó được biểu diễn là;
$$x(t)\rightarrow \frac{dx(t)}{dt}$$Trong trường hợp OPAMP khác biệt, phương pháp luận này rất hữu ích. Chúng ta có thể dễ dàng phân biệt tín hiệu bằng đồ thị hơn là sử dụng công thức. Tuy nhiên, điều kiện là tín hiệu phải là loại hình chữ nhật hoặc hình tam giác, điều này xảy ra trong hầu hết các trường hợp.
| Tín hiệu gốc | Tín hiệu phân biệt |
|---|---|
| Con dốc | Bươc |
| Bươc | Thúc đẩy |
| Thúc đẩy | 1 |
Bảng trên minh họa điều kiện của tín hiệu sau khi được phân biệt. Ví dụ: tín hiệu đoạn đường nối chuyển đổi thành tín hiệu bước sau khi phân biệt. Tương tự, tín hiệu bước đơn vị trở thành tín hiệu xung.
Thí dụ
Hãy để tín hiệu được cung cấp cho chúng tôi $x(t) = 4[r(t)-r(t-2)]$. Khi tín hiệu này được vẽ, nó sẽ giống như biểu đồ ở bên trái của hình bên dưới. Bây giờ, mục đích của chúng tôi là phân biệt tín hiệu đã cho.
Để bắt đầu, chúng ta sẽ bắt đầu phân biệt phương trình đã cho. Chúng ta biết rằng tín hiệu đoạn đường nối sau khi phân biệt sẽ cho tín hiệu bước đơn vị.
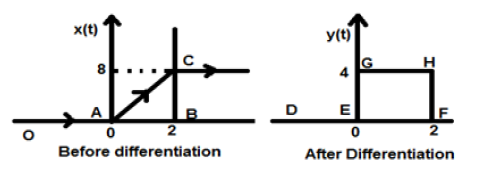
Vì vậy, tín hiệu kết quả y (t) của chúng ta có thể được viết là;
$y(t) = \frac{dx(t)}{dt}$
$= \frac{d4[r(t)-r(t-2)]}{dt}$
$= 4[u(t)-u(t-2)]$
Bây giờ tín hiệu này được vẽ cuối cùng, được hiển thị ở phía bên phải của hình trên.
Tích hợp bất kỳ tín hiệu nào có nghĩa là tổng hợp tín hiệu đó trong miền thời gian cụ thể để có được tín hiệu đã sửa đổi. Về mặt toán học, điều này có thể được biểu diễn dưới dạng:
$$x(t)\rightarrow y(t) = \int_{-\infty}^{t}x(t)dt$$Ở đây, trong hầu hết các trường hợp, chúng ta có thể thực hiện tích phân toán học và tìm ra tín hiệu kết quả nhưng tích hợp trực tiếp liên tiếp nhanh chóng là có thể đối với các tín hiệu được mô tả bằng đồ thị dạng hình chữ nhật. Giống như phân biệt, ở đây, chúng ta cũng sẽ tham khảo một bảng để có kết quả nhanh nhất.
| Tín hiệu gốc | Tín hiệu tích hợp |
|---|---|
| 1 | thúc đẩy |
| Thúc đẩy | bươc |
| Bươc | Con dốc |
Thí dụ
Hãy để chúng tôi xem xét một tín hiệu $x(t) = u(t)-u(t-3)$. Nó được hiển thị trong Hình-1 bên dưới. Rõ ràng, chúng ta có thể thấy rằng đó là một tín hiệu bước. Bây giờ chúng ta sẽ tích hợp nó. Tham khảo bảng, chúng ta biết rằng việc tích hợp tín hiệu bước tạo ra tín hiệu đường dốc.
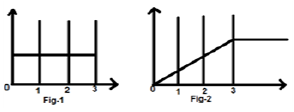
Tuy nhiên, chúng tôi sẽ tính toán nó theo toán học,
$y(t) = \int_{-\infty}^{t}x(t)dt$
$= \int_{-\infty}^{t}[u(t)-u(t-3)]dt$
$= \int_{-\infty}^{t}u(t)dt-\int_{-\infty}^{t}u(t-3)dt$
$= r(t)-r(t-3)$
Tương tự được vẽ như trong hình 2,
Tích chập của hai tín hiệu trong miền thời gian tương đương với phép nhân biểu diễn của chúng trong miền tần số. Về mặt toán học, chúng ta có thể viết tích chập của hai tín hiệu dưới dạng
$$y(t) = x_{1}(t)*x_{2}(t)$$ $$= \int_{-\infty}^{\infty}x_{1}(p).x_{2}(t-p)dp$$Các bước để tích chập
- Lấy tín hiệu x 1 (t) và đặt t = p tại đó để nó sẽ là x 1 (p).
- Lấy tín hiệu x 2 (t) và thực hiện bước 1 và biến nó thành x 2 (p).
- Thực hiện gấp của tín hiệu tức là x 2 (-p).
- Thực hiện dịch chuyển thời gian của tín hiệu trên x 2 [- (pt)]
- Sau đó, thực hiện phép nhân của cả hai tín hiệu. I E$x_{1}(p).x_{2}[−(p−t)]$
Thí dụ
Hãy để chúng tôi thực hiện tích chập của tín hiệu bước u (t) với loại riêng của nó.
$y(t) = u(t)*u(t)$
$= \int_{-\infty}^{\infty}[u(p).u[-(p-t)]dp$
Bây giờ, t này có thể lớn hơn hoặc nhỏ hơn 0, được hiển thị trong các hình dưới đây
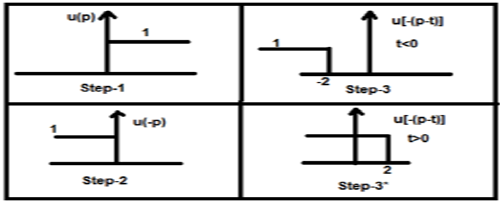
Vì vậy, với trường hợp trên, kết quả phát sinh với các khả năng sau
$y(t) = \begin{cases}0, & if\quad t<0\\\int_{0}^{t}1dt, & for\quad t>0\end{cases}$
$= \begin{cases}0, & if\quad t<0\\t, & t>0\end{cases} = r(t)$
Thuộc tính của Convolution
Giao hoán
Nó nói rằng thứ tự của tích chập không quan trọng, có thể được hiển thị bằng toán học như
$$x_{1}(t)*x_{2}(t) = x_{2}(t)*x_{1}(t)$$Liên kết
Nó nói rằng thứ tự tích chập liên quan đến ba tín hiệu, có thể là bất kỳ thứ gì. Về mặt toán học, nó có thể được hiển thị như sau;
$$x_{1}(t)*[x_{2}(t)*x_{3}(t)] = [x_{1}(t)*x_{2}(t)]*x_{3}(t)$$Phân phối
Hai tín hiệu có thể được thêm vào đầu tiên, và sau đó tích chập của chúng có thể được tạo thành tín hiệu thứ ba. Điều này tương đương với tích chập của hai tín hiệu riêng lẻ với tín hiệu thứ ba và được thêm vào cuối cùng. Về mặt toán học, điều này có thể được viết là;
$$x_{1}(t)*[x_{2}(t)+x_{3}(t)] = [x_{1}(t)*x_{2}(t)+x_{1}(t)*x_{3}(t)]$$Khu vực
Nếu một tín hiệu là kết quả của tích chập của hai tín hiệu thì diện tích của tín hiệu là phép nhân của các tín hiệu riêng lẻ đó. Về mặt toán học, điều này có thể được viết
Nếu $y(t) = x_{1}*x_{2}(t)$
Khi đó, Diện tích của y (t) = Diện tích của x 1 (t) X Diện tích của x 2 (t)
Mở rộng quy mô
Nếu hai tín hiệu được chia tỷ lệ thành một hằng số không xác định “a” và tích chập được thực hiện thì tín hiệu kết quả cũng sẽ được tích tụ thành cùng một hằng số “a” và sẽ được chia cho đại lượng đó như hình dưới đây.
Nếu, $x_{1}(t)*x_{2}(t) = y(t)$
Sau đó, $x_{1}(at)*x_{2}(at) = \frac{y(at)}{a}, a \ne 0$
Sự chậm trễ
Giả sử một tín hiệu y (t) là kết quả từ tích chập của hai tín hiệu x1 (t) và x2 (t). Nếu hai tín hiệu bị trễ lần lượt là t1 và t2, thì tín hiệu thu được y (t) sẽ bị trễ bởi (t1 + t2). Về mặt toán học, nó có thể được viết là -
Nếu, $x_{1}(t)*x_{2}(t) = y(t)$
Sau đó, $x_{1}(t-t_{1})*x_{2}(t-t_{2}) = y[t-(t_{1}+t_{2})]$
Các ví dụ đã giải quyết
Example 1 - Tìm tích chập của các tín hiệu u (t-1) và u (t-2).
Solution- Cho tín hiệu là u (t-1) và u (t-2). Phép chập của chúng có thể được thực hiện như hình dưới đây -
$y(t) = u(t-1)*u(t-2)$
$y(t) = \int_{-\infty}^{+\infty}[u(t-1).u(t-2)]dt$
$= r(t-1)+r(t-2)$
$= r(t-3)$
Example 2 - Tìm tích chập của hai tín hiệu cho bởi
$x_{1}(n) = \lbrace 3,-2, 2\rbrace $
$x_{2}(n) = \begin{cases}2, & 0\leq n\leq 4\\0, & x > elsewhere\end{cases}$
Solution -
x 2 (n) có thể được giải mã thành$x_{2}(n) = \lbrace 2,2,2,2,2\rbrace Originalfirst$
x 1 (n) đã cho trước đó$= \lbrace 3,-2,3\rbrace = 3-2Z^{-1}+2Z^{-2}$
Tương tự, $x_{2}(z) = 2+2Z^{-1}+2Z^{-2}+2Z^{-3}+2Z^{-4}$
Tín hiệu kết quả,
$X(Z) = X_{1}(Z)X_{2}(z)$
$= \lbrace 3-2Z^{-1}+2Z^{-2}\rbrace \times \lbrace 2+2Z^{-1}+2Z^{-2}+2Z^{-3}+2Z^{-4}\rbrace$
$= 6+2Z^{-1}+6Z^{-2}+6Z^{-3}+6Z^{-4}+6Z^{-5}$
Thực hiện phép biến đổi Z nghịch đảo ở trên, chúng ta sẽ nhận được tín hiệu kết quả là
$x(n) = \lbrace 6,2,6,6,6,0,4\rbrace$ Nguồn gốc lúc đầu
Example 3 - Xác định tích chập của 2 tín hiệu sau -
$x(n) = \lbrace 2,1,0,1\rbrace$
$h(n) = \lbrace 1,2,3,1\rbrace$
Solution -
Thực hiện phép biến đổi Z của các tín hiệu, chúng tôi nhận được,
$x(z) = 2+2Z^{-1}+2Z^{-3}$
Và $h(n) = 1+2Z^{-1}+3Z^{-2}+Z^{-3}$
Bây giờ tích chập của hai tín hiệu có nghĩa là nhân các phép biến đổi Z của chúng
Đó là $Y(Z) = X(Z) \times h(Z)$
$= \lbrace 2+2Z^{-1}+2Z^{-3}\rbrace \times \lbrace 1+2Z^{-1}+3Z^{-2}+Z^{-3}\rbrace$
$= \lbrace 2+5Z^{-1}+8Z^{-2}+6Z^{-3}+3Z^{-4}+3Z^{-5}+Z^{-6}\rbrace$
Lấy phép biến đổi Z nghịch đảo, tín hiệu kết quả có thể được viết là;
$y(n) = \lbrace 2,5,8,6,6,1 \rbrace Originalfirst$
Một số hệ thống có phản hồi và một số thì không. Những thứ không có hệ thống phản hồi, đầu ra của chúng chỉ phụ thuộc vào giá trị hiện tại của đầu vào. Giá trị trong quá khứ của dữ liệu không có tại thời điểm đó. Các loại hệ thống này được gọi là hệ thống tĩnh. Nó không phụ thuộc vào các giá trị tương lai.
Vì các hệ thống này không có bất kỳ bản ghi nào trong quá khứ, vì vậy chúng cũng không có bất kỳ bộ nhớ nào. Do đó, chúng ta nói tất cả các hệ thống tĩnh đều là hệ thống ít bộ nhớ. Hãy để chúng tôi lấy một ví dụ để hiểu khái niệm này tốt hơn nhiều.
Thí dụ
Hãy để chúng tôi xác minh xem các hệ thống sau đây có phải là hệ thống tĩnh hay không.
- $y(t) = x(t)+x(t-1)$
- $y(t) = x(2t)$
- $y(t) = x = \sin [x(t)]$
a) $y(t) = x(t)+x(t-1)$
Ở đây, x (t) là giá trị hiện tại. Nó không liên quan gì đến các giá trị quá khứ của thời gian. Vì vậy, nó là một hệ thống tĩnh. Tuy nhiên, trong trường hợp x (t-1), nếu chúng ta đặt t = 0, nó sẽ giảm xuống x (-1) là một giá trị phụ thuộc vào quá khứ. Vì vậy, nó không phải là tĩnh. Do đó ở đây y (t) không phải là một hệ tĩnh.
b) $y(t) = x(2t)$
Nếu chúng ta thay t = 2, kết quả sẽ là y (t) = x (4). Một lần nữa, nó phụ thuộc vào giá trị tương lai. Vì vậy, nó cũng không phải là một hệ thống tĩnh.
c) $y(t) = x = \sin [x(t)]$
Trong biểu thức này, chúng ta đang xử lý hàm sin. Phạm vi của hàm sin nằm trong khoảng -1 đến +1. Vì vậy, bất kỳ giá trị nào chúng ta thay thế cho x (t), chúng ta sẽ nằm trong khoảng từ -1 đến +1. Do đó, có thể nói nó không phụ thuộc vào bất kỳ giá trị nào trong quá khứ hoặc tương lai. Do đó, nó là một hệ thống tĩnh.
Từ các ví dụ trên, chúng ta có thể rút ra các kết luận sau:
- Bất kỳ hệ thống nào có dịch chuyển thời gian đều không tĩnh.
- Bất kỳ hệ thống nào có sự thay đổi biên độ cũng không phải là tĩnh.
- Trường hợp tích hợp và phân hóa cũng không tĩnh.
Nếu một hệ thống phụ thuộc vào giá trị trong quá khứ và tương lai của tín hiệu tại bất kỳ thời điểm nào thì nó được gọi là hệ thống động. Không giống như hệ thống tĩnh, đây không phải là hệ thống ít bộ nhớ. Chúng lưu trữ các giá trị trong quá khứ và tương lai. Do đó, chúng yêu cầu một số bộ nhớ. Hãy để chúng tôi hiểu rõ hơn lý thuyết này thông qua một số ví dụ.
Ví dụ
Tìm hiểu xem các hệ thống sau đây là động.
a) $y(t) = x(t+1)$
Trong trường hợp này nếu chúng ta đặt t = 1 vào phương trình, nó sẽ được chuyển thành x (2), là một giá trị phụ thuộc trong tương lai. Bởi vì ở đây chúng ta đang đưa đầu vào là 1 nhưng nó đang hiển thị giá trị cho x (2). Vì nó là một tín hiệu phụ thuộc trong tương lai, nên rõ ràng nó là một hệ thống động.
b) $y(t) = Real[x(t)]$
$$= \frac{[x(t)+x(t)^*]}{2}$$Trong trường hợp này, bất kể giá trị nào chúng ta đặt nó sẽ hiển thị tín hiệu giá trị thực thời gian đó. Nó không phụ thuộc vào các giá trị trong tương lai hoặc quá khứ. Do đó, nó không phải là một hệ thống động mà nó là một hệ thống tĩnh.
c) $y(t) = Even[x(t)]$
$$= \frac{[x(t)+x(-t)]}{2}$$Ở đây, nếu chúng ta thay thế t = 1, một tín hiệu hiển thị x (1) và tín hiệu khác sẽ hiển thị x (-1) là một giá trị trong quá khứ. Tương tự, nếu chúng ta đặt t = -1 thì một tín hiệu sẽ hiển thị x (-1) và tín hiệu khác sẽ hiển thị x (1) là giá trị trong tương lai. Do đó, rõ ràng nó là một trường hợp của hệ thống Động.
d) $y(t) = \cos [x(t)]$
Trong trường hợp này, vì hệ thống là hàm cosin nên nó có một miền giá trị nhất định nằm trong khoảng từ -1 đến +1. Do đó, bất kỳ giá trị nào chúng ta đặt chúng ta sẽ nhận được kết quả trong giới hạn quy định. Do đó, nó là một hệ thống tĩnh
Từ các ví dụ trên, chúng ta có thể rút ra các kết luận sau:
- Tất cả các tín hiệu trường hợp dịch chuyển thời gian đều là tín hiệu động.
- Trong trường hợp mở rộng thời gian, tất cả các tín hiệu đều là tín hiệu động.
- Các trường hợp tích hợp các tín hiệu là tín hiệu động.
Trước đây, chúng ta đã thấy rằng hệ thống cần phải độc lập với các giá trị tương lai và quá khứ để trở thành tĩnh. Trong trường hợp này, điều kiện gần như giống nhau với ít sửa đổi. Ở đây, để hệ thống có quan hệ nhân quả, nó chỉ nên độc lập với các giá trị trong tương lai. Điều đó có nghĩa là sự phụ thuộc trong quá khứ sẽ không gây ra vấn đề gì cho hệ thống trở thành nguyên nhân.
Hệ thống nhân quả là hệ thống có thể nhận ra thực tế hoặc vật lý. Chúng ta hãy xem xét một số ví dụ để hiểu điều này tốt hơn nhiều.
Ví dụ
Chúng ta hãy xem xét các tín hiệu sau đây.
a) $y(t) = x(t)$
Ở đây, tín hiệu chỉ phụ thuộc vào các giá trị hiện tại của x. Ví dụ, nếu chúng ta thay thế t = 3, kết quả sẽ chỉ hiển thị trong khoảng thời gian đó. Do đó, vì nó không phụ thuộc vào giá trị tương lai, chúng ta có thể gọi nó là hệ thống Nhân quả.
b) $y(t) = x(t-1)$
Ở đây, hệ thống phụ thuộc vào các giá trị trong quá khứ. Ví dụ: nếu chúng ta thay thế t = 3, biểu thức sẽ giảm thành x (2), là một giá trị trong quá khứ so với đầu vào của chúng ta. Không có trường hợp nào, nó phụ thuộc vào các giá trị trong tương lai. Do đó, hệ thống này cũng là một hệ thống nhân quả.
c) $y(t) = x(t)+x(t+1)$
Trong trường hợp này, hệ thống có hai phần. Phần x (t), như chúng ta đã thảo luận trước đó, chỉ phụ thuộc vào các giá trị hiện tại. Vì vậy, không có vấn đề gì với nó. Tuy nhiên, nếu chúng ta lấy trường hợp của x (t + 1), rõ ràng nó phụ thuộc vào các giá trị tương lai vì nếu chúng ta đặt t = 1, biểu thức sẽ giảm thành x (2) là giá trị tương lai. Do đó, nó không phải là nhân quả.
Một hệ thống phi nhân quả đối lập với hệ thống nhân quả. Nếu một hệ thống phụ thuộc vào các giá trị tương lai của đầu vào tại bất kỳ thời điểm nào thì hệ thống đó được coi là hệ thống phi nhân quả.
Ví dụ
Hãy để chúng tôi lấy một số ví dụ và cố gắng hiểu điều này theo cách tốt hơn.
a) $y(t) = x(t+1)$
Chúng ta cũng đã thảo luận về hệ thống này trong hệ thống nhân quả. Đối với bất kỳ đầu vào nào, nó sẽ làm giảm hệ thống về giá trị tương lai của nó. Ví dụ, nếu chúng ta đặt t = 2, nó sẽ giảm xuống x (3), là một giá trị trong tương lai. Do đó, hệ thống là Không Nhân Quả.
b) $y(t) = x(t)+x(t+2)$
Trong trường hợp này, x (t) hoàn toàn là một hàm phụ thuộc giá trị hiện tại. Chúng ta đã thảo luận rằng hàm x (t + 2) phụ thuộc vào tương lai vì với t = 3, nó sẽ cung cấp các giá trị cho x (5). Do đó, nó là Phi nhân quả.
c) $y(t) = x(t-1)+x(t)$
Trong hệ thống này, nó phụ thuộc vào giá trị hiện tại và quá khứ của đầu vào đã cho. Bất kể giá trị nào chúng ta thay thế, nó sẽ không bao giờ cho thấy bất kỳ sự phụ thuộc nào trong tương lai. Rõ ràng, nó không phải là một hệ thống phi nhân quả; đúng hơn nó là một hệ thống Nhân quả.
Hệ thống phản nhân quả chỉ là một phiên bản sửa đổi một chút của hệ thống phi nhân quả. Hệ thống chỉ phụ thuộc vào các giá trị tương lai của đầu vào. Nó không phụ thuộc vào giá trị hiện tại hoặc quá khứ.
Ví dụ
Tìm hiểu xem các hệ thống sau đây có phản nhân quả hay không.
a) $y(t) = x(t)+x(t-1)$
Hệ thống có hai chức năng phụ. Một hàm con x (t + 1) phụ thuộc vào giá trị tương lai của đầu vào nhưng một hàm con khác x (t) chỉ phụ thuộc vào hiện tại. Vì hệ thống phụ thuộc vào giá trị hiện tại cũng như giá trị tương lai, hệ thống này không phản nhân quả.
b) $y(t) = x(t+3)$
Nếu chúng ta phân tích hệ thống trên, chúng ta có thể thấy rằng hệ thống chỉ phụ thuộc vào các giá trị tương lai của hệ thống tức là nếu chúng ta đặt t = 0, nó sẽ giảm xuống x (3), là một giá trị tương lai. Hệ thống này là một ví dụ hoàn hảo về hệ thống phản nhân quả.
Một hệ thống tuyến tính tuân theo quy luật chồng chất. Định luật này là điều kiện cần và đủ để chứng minh tính tuyến tính của hệ thống. Ngoài ra, hệ thống còn là sự kết hợp của hai loại luật -
- Luật cộng hưởng
- Luật đồng nhất

Cả hai, luật đồng nhất và luật cộng gộp đều được thể hiện trong các hình trên. Tuy nhiên, cần có một số điều kiện khác để kiểm tra hệ thống có tuyến tính hay không.
The conditions are -
- Đầu ra phải bằng 0 đối với đầu vào bằng không.
- Không được có bất kỳ toán tử phi tuyến tính nào trong hệ thống.
Ví dụ về toán tử phi tuyến tính -
(a) Các toán tử lượng giác - Sin, Cos, Tan, Cot, Sec, Cosec, v.v.
(b) Hàm mũ, lôgarit, môđun, hình vuông, hình lập phương, v.v.
(c) sa (i / p), Sinc (i / p), Sqn (i / p), v.v.
Đầu vào x hoặc đầu ra y không được có các toán tử phi tuyến tính này.
Ví dụ
Hãy để chúng tôi tìm hiểu xem các hệ thống sau đây là tuyến tính.
a) $y(t) = x(t)+3$
Hệ thống này không phải là một hệ thống tuyến tính vì nó vi phạm điều kiện đầu tiên. Nếu chúng ta đặt đầu vào là 0, làm cho x (t) = 0, thì đầu ra không phải là 0.
b) $y(t) = \sin tx(t)$
Trong hệ thống này, nếu chúng ta cho đầu vào là 0, thì đầu ra sẽ trở thành 0. Do đó, điều kiện đầu tiên được thỏa mãn rõ ràng. Một lần nữa, không có toán tử phi tuyến tính nào được áp dụng trên x (t). Do đó, điều kiện thứ hai cũng được thỏa mãn. Do đó, hệ thống là một hệ thống tuyến tính.
c) $y(t) = \sin (x(t))$
Trong hệ thống trên, điều kiện đầu tiên được thỏa mãn vì nếu chúng ta đặt x (t) = 0, đầu ra cũng sẽ là sin (0) = 0. Tuy nhiên, điều kiện thứ hai không được thỏa mãn, vì có một toán tử phi tuyến tính. hoạt động x (t). Do đó, hệ thống không phải là tuyến tính.
Nếu chúng ta muốn xác định hệ thống này, chúng ta có thể nói rằng các hệ thống không tuyến tính là các hệ thống phi tuyến tính. Rõ ràng, tất cả các điều kiện bị vi phạm trong hệ thống tuyến tính, nên được thỏa mãn trong trường hợp này.
Điều kiện
Đầu ra không được bằng 0 khi đầu vào được áp dụng bằng 0.
Bất kỳ toán tử phi tuyến tính nào cũng có thể được áp dụng trên đầu vào hoặc đầu ra để làm cho hệ thống phi tuyến tính.
Ví dụ
Để tìm hiểu xem hệ thống đã cho là tuyến tính hay phi tuyến tính.
a) $y(t) = e^{x(t)}$
Trong hệ thống trên, điều kiện đầu tiên được thỏa mãn vì nếu chúng ta làm cho đầu vào bằng 0, đầu ra là 1. Ngoài ra, toán tử phi tuyến tính hàm mũ được áp dụng cho đầu vào. Rõ ràng, nó là một trường hợp của hệ thống phi tuyến tính.
b) $y(t) = x(t+1)+x(t-1)$
Loại hệ thống trên xử lý cả giá trị quá khứ và tương lai. Tuy nhiên, nếu chúng ta đặt đầu vào của nó bằng 0, thì không có giá trị nào của nó tồn tại. Do đó, chúng ta có thể nói nếu đầu vào bằng 0, thì thời gian được chia tỷ lệ và phiên bản dịch chuyển theo thời gian của đầu vào cũng sẽ bằng 0, điều này vi phạm điều kiện đầu tiên của chúng ta. Một lần nữa, không tồn tại toán tử phi tuyến tính. Do đó, điều kiện thứ hai cũng bị vi phạm. Rõ ràng, hệ thống này không phải là một hệ thống phi tuyến tính; đúng hơn nó là một hệ thống tuyến tính.
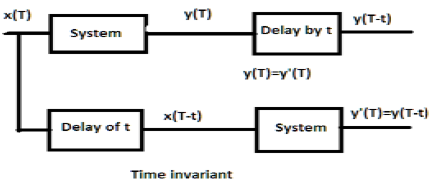
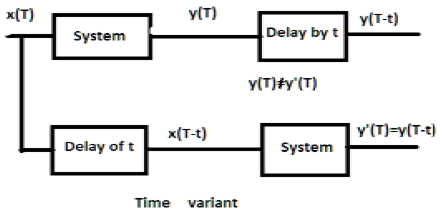
Đối với một hệ thống bất biến thời gian, đầu ra và đầu vào phải bị trễ một đơn vị thời gian nào đó. Bất kỳ độ trễ nào được cung cấp trong đầu vào phải được phản ánh trong đầu ra đối với một hệ thống bất biến theo thời gian.
Ví dụ
a) $y(T) = x(2T)$
Nếu biểu thức trên, trước tiên nó được chuyển qua hệ thống và sau đó qua thời gian trễ (như thể hiện trong phần trên của hình); thì đầu ra sẽ trở thành$x(2T-2t)$. Bây giờ, biểu thức tương tự được chuyển qua một khoảng thời gian trễ trước và sau đó qua hệ thống (như thể hiện trong phần dưới của hình). Đầu ra sẽ trở thành$x(2T-t)$.
Do đó, hệ thống không phải là một hệ thống bất biến theo thời gian.
b) $y(T) = \sin [x(T)]$
Nếu tín hiệu đầu tiên được truyền qua hệ thống và sau đó thông qua quá trình trễ thời gian, đầu ra là $\sin x(T-t)$. Tương tự, nếu hệ thống được chuyển qua khoảng thời gian trễ trước sau đó thông qua hệ thống thì đầu ra sẽ là$\sin x(T-t)$. Chúng ta có thể thấy rõ rằng cả hai đầu ra đều giống nhau. Do đó, hệ thống là bất biến thời gian.
Đối với hệ thống biến thể thời gian cũng vậy, đầu ra và đầu vào phải bị trễ bởi một hằng số thời gian nhưng độ trễ ở đầu vào không được phản ánh ở đầu ra. Tất cả các trường hợp tỷ lệ thời gian là ví dụ của hệ thống biến thể thời gian. Tương tự, khi hệ số trong mối quan hệ hệ thống là một hàm của thời gian, thì hệ thống cũng là biến thời gian.
Ví dụ
a) $y(t) = x[\cos T]$
Nếu tín hiệu trên lần đầu tiên được truyền qua hệ thống và sau đó qua thời gian trễ, đầu ra sẽ là $x\cos (T-t)$. Nếu nó được chuyển qua thời gian trễ trước rồi mới qua hệ thống, nó sẽ$x(\cos T-t)$. Vì đầu ra không giống nhau, hệ thống là biến thể theo thời gian.
b) $y(T) = \cos T.x(T)$
Nếu biểu thức trên lần đầu tiên được chuyển qua hệ thống và sau đó qua khoảng thời gian trễ, thì đầu ra sẽ là $\cos(T-t)x(T-t)$. Tuy nhiên, nếu biểu thức được chuyển qua khoảng thời gian trễ trước rồi mới qua hệ thống, đầu ra sẽ là$\cos T.x(T-t)$. Vì kết quả đầu ra không giống nhau, rõ ràng hệ thống là biến thể theo thời gian.
Một hệ thống ổn định thỏa mãn điều kiện BIBO (đầu vào có giới hạn cho đầu ra có giới hạn). Ở đây, giới hạn có nghĩa là hữu hạn về biên độ. Đối với một hệ thống ổn định, đầu ra phải có giới hạn hoặc hữu hạn, đối với đầu vào hữu hạn hoặc có giới hạn, tại mọi thời điểm.
Một số ví dụ về đầu vào có giới hạn là các hàm của sin, cosine, DC, signum và bước đơn vị.
Ví dụ
a) $y(t) = x(t)+10$
Ở đây, đối với đầu vào có giới hạn xác định, chúng ta có thể nhận được đầu ra có giới hạn xác định, tức là nếu chúng ta đặt $x(t) = 2, y(t) = 12$được ràng buộc trong tự nhiên. Do đó, hệ thống hoạt động ổn định.
b) $y(t) = \sin [x(t)]$
Trong biểu thức đã cho, chúng ta biết rằng các hàm sin có một ranh giới xác định của các giá trị, nằm trong khoảng từ -1 đến +1. Vì vậy, bất kỳ giá trị nào chúng ta sẽ thay thế tại x (t), chúng ta sẽ nhận được các giá trị trong ranh giới của chúng ta. Do đó, hệ thống hoạt động ổn định.
Hệ thống không ổn định không thỏa mãn các điều kiện BIBO. Do đó, đối với một đầu vào có giới hạn, chúng ta không thể mong đợi một đầu ra có giới hạn trong trường hợp hệ thống không ổn định.
Ví dụ
a) $y(t) = tx(t)$
Ở đây, đối với một đầu vào hữu hạn, chúng ta không thể mong đợi một đầu ra hữu hạn. Ví dụ, nếu chúng tôi sẽ đặt$x(t) = 2 \Rightarrow y(t) = 2t$. Đây không phải là một giá trị hữu hạn vì chúng ta không biết giá trị của t. Vì vậy, nó có thể được thay đổi từ bất cứ đâu. Do đó, hệ thống này hoạt động không ổn định. Nó là một hệ thống không ổn định.
b) $y(t) = \frac{x(t)}{\sin t}$
Chúng ta đã thảo luận trước đó, rằng hàm sin có một phạm vi xác định từ -1 đến +1; nhưng ở đây, nó có mặt ở mẫu số. Vì vậy, trong trường hợp xấu nhất, nếu chúng ta đặt t = 0 và hàm sin trở thành 0, thì toàn bộ hệ thống sẽ có xu hướng vô cùng. Do đó, loại hệ thống này không ổn định chút nào. Rõ ràng, đây là một hệ thống không ổn định.
Example 1 - Kiểm tra xem $y(t) = x*(t)$ là tuyến tính hoặc phi tuyến tính.
Solution- Hàm biểu diễn liên hợp của đầu vào. Nó có thể được xác minh bằng luật đồng nhất thứ nhất và luật cộng gộp hoặc bằng hai quy tắc. Tuy nhiên, việc xác minh thông qua các quy tắc dễ dàng hơn rất nhiều, vì vậy chúng tôi sẽ thực hiện theo cách đó.
Nếu đầu vào của hệ thống bằng 0, thì đầu ra cũng có xu hướng bằng không. Do đó, điều kiện đầu tiên của chúng tôi được thỏa mãn. Không có toán tử phi tuyến tính nào được sử dụng ở đầu vào cũng như đầu ra. Do đó, hệ thống là tuyến tính.
Example 2 - Kiểm tra xem $y(t)=\begin{cases}x(t+1), & t > 0\\x(t-1), & t\leq 0\end{cases}$ là tuyến tính hoặc không tuyến tính
Solution- Rõ ràng, chúng ta có thể thấy rằng khi thời gian trở nên nhỏ hơn hoặc bằng 0, đầu vào sẽ trở thành không. Vì vậy, chúng ta có thể nói rằng ở đầu vào bằng không, đầu ra cũng bằng không và điều kiện đầu tiên của chúng ta được thỏa mãn.
Một lần nữa, không có toán tử phi tuyến tính nào được sử dụng ở đầu vào cũng như ở đầu ra. Do đó, hệ thống là tuyến tính.
Example 3 - Kiểm tra xem $y(t) = \sin t.x(t)$ ổn định hay không.
Solution - Giả sử, chúng ta đã lấy giá trị của x (t) là 3. Ở đây, hàm sin đã được nhân với nó và giá trị lớn nhất và nhỏ nhất của hàm sin thay đổi trong khoảng từ -1 đến +1.
Do đó, giá trị lớn nhất và nhỏ nhất của toàn hàm cũng sẽ thay đổi trong khoảng từ -3 đến +3. Như vậy, hệ thống ổn định vì ở đây chúng ta đang nhận được đầu vào có giới hạn cho đầu ra có giới hạn.
Biến đổi Fourier thời gian rời rạc (DTFT) tồn tại cho tín hiệu năng lượng và công suất. Biến đổi Z cũng không tồn tại đối với tín hiệu loại năng lượng và Nguồn (NENP), chỉ ở một mức độ nhất định. Sự thay thế$z=e^{jw}$ được sử dụng cho chuyển đổi Z sang chuyển đổi DTFT chỉ cho tín hiệu hoàn toàn có thể tổng hợp được.
Vì vậy, biến đổi Z của tín hiệu thời gian rời rạc x (n) trong một chuỗi lũy thừa có thể được viết dưới dạng:
$$X(z) = \sum_{n-\infty}^\infty x(n)Z^{-n}$$Phương trình trên biểu diễn một phương trình biến đổi Z hai vế.
Nói chung, khi một tín hiệu được biến đổi Z, nó có thể được biểu diễn dưới dạng:
$$X(Z) = Z[x(n)]$$Hoặc là $x(n) \longleftrightarrow X(Z)$
Nếu đó là tín hiệu thời gian liên tục thì không cần phép biến đổi Z vì sử dụng phép biến đổi Laplace. Tuy nhiên, các tín hiệu thời gian rời rạc chỉ có thể được phân tích thông qua các phép biến đổi Z.
Vùng hội tụ
Vùng hội tụ là phạm vi của biến phức Z trong mặt phẳng Z. Biến đổi Z của tín hiệu là hữu hạn hoặc hội tụ. Vì vậy, ROC đại diện cho các tập giá trị của Z, trong đó X (Z) có giá trị hữu hạn.
Thuộc tính của ROC
- ROC không bao gồm bất kỳ cực nào.
- Đối với tín hiệu bên phải, ROC sẽ nằm ngoài vòng tròn trong mặt phẳng Z.
- Đối với tín hiệu bên trái, ROC sẽ nằm bên trong vòng tròn trong mặt phẳng Z.
- Để ổn định, ROC bao gồm vòng tròn đơn vị trong mặt phẳng Z.
- Đối với tín hiệu cả hai mặt, ROC là một vòng trong mặt phẳng Z.
- Đối với tín hiệu có thời lượng hữu hạn, ROC là toàn bộ mặt phẳng Z.
Phép biến đổi Z có đặc điểm duy nhất là -
- Biểu thức của X (Z)
- ROC của X (Z)
Tín hiệu và ROC của chúng
| x (n) | X (Z) | ROC |
|---|---|---|
| $\delta(n)$ | $1$ | Toàn bộ mặt phẳng Z |
| $U(n)$ | $1/(1-Z^{-1})$ | Mod (Z)> 1 |
| $a^nu(n)$ | $1/(1-aZ^{-1})$ | Mod (Z)> Mod (a) |
| $-a^nu(-n-1)$ | $1/(1-aZ^{-1})$ | Mod (Z) <Mod (a) |
| $na^nu(n)$ | $aZ^{-1}/(1-aZ^{-1})^2$ | Mod (Z)> Mod (a) |
| $-a^nu(-n-1)$ | $aZ^{-1}/(1-aZ^{-1})^2$ | Mod (Z) <Mod (a) |
| $U(n)\cos \omega n$ | $(Z^2-Z\cos \omega)/(Z^2-2Z \cos \omega +1)$ | Mod (Z)> 1 |
| $U(n)\sin \omega n$ | $(Z\sin \omega)/(Z^2-2Z \cos \omega +1)$ | Mod (Z)> 1 |
Thí dụ
Hãy để chúng tôi tìm biến đổi Z và ROC của một tín hiệu được cho dưới dạng $x(n) = \lbrace 7,3,4,9,5\rbrace$, trong đó điểm gốc của chuỗi là 3.
Solution - Áp dụng công thức ta có -
$X(z) = \sum_{n=-\infty}^\infty x(n)Z^{-n}$
$= \sum_{n=-1}^3 x(n)Z^{-n}$
$= x(-1)Z+x(0)+x(1)Z^{-1}+x(2)Z^{-2}+x(3)Z^{-3}$
$= 7Z+3+4Z^{-1}+9Z^{-2}+5Z^{-3}$
ROC là toàn bộ mặt phẳng Z không bao gồm Z = 0, ∞, -∞
Trong chương này, chúng ta sẽ hiểu các tính chất cơ bản của phép biến hình Z.
Tuyến tính
Nó nói rằng khi hai hoặc nhiều tín hiệu rời rạc riêng lẻ được nhân với các hằng số, thì các biến đổi Z tương ứng của chúng cũng sẽ được nhân với các hằng số tương tự.
Về mặt toán học,
$$a_1x_1(n)+a_2x_2(n) = a_1X_1(z)+a_2X_2(z)$$Proof - Chúng tôi biết điều đó,
$$X(Z) = \sum_{n=-\infty}^\infty x(n)Z^{-n}$$$= \sum_{n=-\infty}^\infty (a_1x_1(n)+a_2x_2(n))Z^{-n}$
$= a_1\sum_{n = -\infty}^\infty x_1(n)Z^{-n}+a_2\sum_{n = -\infty}^\infty x_2(n)Z^{-n}$
$= a_1X_1(z)+a_2X_2(z)$ (Do đó đã được chứng minh)
Đây, ROC là $ROC_1\bigcap ROC_2$.
Dịch chuyển thời gian
Thuộc tính dịch chuyển thời gian mô tả sự thay đổi trong miền thời gian trong tín hiệu rời rạc sẽ ảnh hưởng như thế nào đến miền Z, có thể được viết là;
$$x(n-n_0)\longleftrightarrow X(Z)Z^{-n}$$Hoặc là $x(n-1)\longleftrightarrow Z^{-1}X(Z)$
Proof -
Để cho $y(P) = X(P-K)$
$Y(z) = \sum_{p = -\infty}^\infty y(p)Z^{-p}$
$= \sum_{p = -\infty}^\infty (x(p-k))Z^{-p}$
Cho s = pk
$= \sum_{s = -\infty}^\infty x(s)Z^{-(s+k)}$
$= \sum_{s = -\infty}^\infty x(s)Z^{-s}Z^{-k}$
$= Z^{-k}[\sum_{s=-\infty}^\infty x(m)Z^{-s}]$
$= Z^{-k}X(Z)$ (Do đó đã được chứng minh)
Ở đây, ROC có thể được viết là Z = 0 (p> 0) hoặc Z = ∞ (p <0)
Thí dụ
U (n) và U (n-1) có thể được vẽ như sau
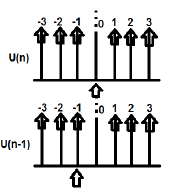
Phép biến đổi Z của U (n) cab được viết là;
$\sum_{n = -\infty}^\infty [U(n)]Z^{-n} = 1$
Phép biến đổi Z của U (n-1) có thể được viết là;
$\sum_{n = -\infty}^\infty [U(n-1)]Z^{-n} = Z^{-1}$
Nên ở đây $x(n-n_0) = Z^{-n_0}X(Z)$ (Do đó đã được chứng minh)
Tỷ lệ thời gian
Thuộc tính Time Scaling cho chúng ta biết miền Z của tín hiệu sẽ như thế nào khi thời gian được chia tỷ lệ ở dạng rời rạc, có thể được viết là;
$$a^nx(n) \longleftrightarrow X(a^{-1}Z)$$Proof -
Để cho $y(p) = a^{p}x(p)$
$Y(P) = \sum_{p=-\infty}^\infty y(p)Z^{-p}$
$= \sum_{p=-\infty}^\infty a^px(p)Z^{-p}$
$= \sum_{p=-\infty}^\infty x(p)[a^{-1}Z]^{-p}$
$= X(a^{-1}Z)$(Do đó đã chứng minh)
ROC: = Mod (ar1) <Mod (Z) <Mod (ar2) trong đó Mod = Modulus
Thí dụ
Hãy để chúng tôi xác định biến đổi Z của $x(n) = a^n \cos \omega n$ sử dụng thuộc tính Tỷ lệ thời gian.
Solution -
Chúng ta đã biết rằng sự biến đổi Z của tín hiệu $\cos (\omega n)$ được đưa ra bởi -
$$\sum_{n=-\infty}^\infty(\cos \omega n)Z^{-n} = (Z^2-Z \cos \omega)/(Z^2-2Z\cos \omega +1)$$
Bây giờ, áp dụng thuộc tính Tỷ lệ thời gian, phép biến đổi Z của $a^n \cos \omega n$ có thể được viết như;
$\sum_{n=-\infty}^\infty(a^n\cos \omega n)Z^{-n} = X(a^{-1}Z)$
$= [(a^{-1}Z)^2-(a^{-1}Z \cos \omega n)]/((a^{-1}Z)^2-2(a^{-1}Z \cos \omega n)+1)$
$= Z(Z-a \cos \omega)/(Z^2-2az \cos \omega+a^2)$
Sự khác biệt hóa thành công
Thuộc tính phân biệt thành công cho thấy rằng biến đổi Z sẽ diễn ra khi chúng ta phân biệt tín hiệu rời rạc trong miền thời gian, theo thời gian. Điều này được hiển thị như dưới đây.
$$\frac{dx(n)}{dn} = (1-Z^{-1})X(Z)$$Proof -
Xem xét LHS của phương trình - $\frac{dx(n)}{dn}$
$$= \frac{[x(n)-x(n-1)]}{[n-(n-1)]}$$$= x(n)-X(n-1)$
$= x(Z)-Z^{-1}x(Z)$
$= (1-Z^{-1})x(Z)$ (Do đó đã được chứng minh)
ROC: R1 <Mod (Z) <R2
Thí dụ
Hãy để chúng tôi tìm biến đổi Z của một tín hiệu được cho bởi $x(n) = n^2u(n)$
Bằng tài sản chúng tôi có thể viết
$Zz[nU(n)] = -Z\frac{dZ[U(n)]}{dz}$
$= -Z\frac{d[\frac{Z}{Z-1}]}{dZ}$
$= Z/((Z-1)^2$
$= y(let)$
Bây giờ, Z [ny] có thể được tìm ra bằng cách áp dụng lại thuộc tính,
$Z(n,y) = -Z\frac{dy}{dz}$
$= -Z\frac{d[Z/(Z-1)^3]}{dz}$
$= Z(Z+1)/(Z-1)^2$
Convolution
Điều này mô tả sự thay đổi trong miền Z của hệ thống khi một phép chập diễn ra ở dạng tín hiệu rời rạc, có thể được viết là:
$x_1(n)*x_2(n) \longleftrightarrow X_1(Z).X_2(Z)$
Proof -
$X(Z) = \sum_{n = -\infty}^\infty x(n)Z^{-n}$
$= \sum_{n=-\infty}^\infty[\sum_{k = -\infty}^\infty x_1(k)x_2(n-k)]Z^{-n}$
$= \sum_{k = -\infty}^\infty x_1(k)[\sum_n^\infty x_2(n-k)Z^{-n}]$
$= \sum_{k = -\infty}^\infty x_1(k)[\sum_{n = -\infty}^\infty x_2(n-k)Z^{-(n-k)}Z^{-k}]$
Đặt nk = l, thì phương trình cab trên được viết dưới dạng:
$X(Z) = \sum_{k = -\infty}^\infty x_1(k)[Z^{-k}\sum_{l=-\infty}^\infty x_2(l)Z^{-l}]$
$= \sum_{k = -\infty}^\infty x_1(k)X_2(Z)Z^{-k}$
$= X_2(Z)\sum_{k = -\infty}^\infty x_1(Z)Z^{-k}$
$= X_1(Z).X_2(Z)$ (Do đó đã được chứng minh)
ROC:$ROC\bigcap ROC2$
Thí dụ
Hãy để chúng tôi tìm tích chập được cho bởi hai tín hiệu
$x_1(n) = \lbrace 3,-2,2\rbrace$ ... (phương trình 1)
$x_2(n) = \lbrace 2,0\leq 4\quad and\quad 0\quad elsewhere\rbrace$ ... (phương trình 2)
Biến đổi Z của phương trình đầu tiên có thể được viết dưới dạng;
$\sum_{n = -\infty}^\infty x_1(n)Z^{-n}$
$= 3-2Z^{-1}+2Z^{-2}$
Biến đổi Z của tín hiệu thứ hai có thể được viết là;
$\sum_{n = -\infty}^\infty x_2(n)Z^{-n}$
$= 2+2Z^{-1}+2Z^{-2}+2Z^{-3}+2Z^{-4}$
Vì vậy, tích chập của hai tín hiệu trên được cho bởi:
$X(Z) = [x_1(Z)^*x_2(Z)]$
$= [3-2Z^{-1}+2Z^{-2}]\times [2+2Z^{-1}+2Z^{-2}+2Z^{-3}+2Z^{-4}]$
$= 6+2Z^{-1}+6Z^{-2}+6Z^{-3}+...\quad...\quad...$
Thực hiện phép biến đổi Z ngược mà chúng ta nhận được,
$x(n) = \lbrace 6,2,6,6,6,0,4\rbrace$
Định lý giá trị ban đầu
Nếu x (n) là một dãy nhân quả, có biến đổi Z là X (z), thì định lý giá trị ban đầu có thể được viết dưới dạng;
$X(n)(at\quad n = 0) = \lim_{z \to \infty} X(z)$
Proof - Chúng tôi biết điều đó,
$X(Z) = \sum_{n = 0} ^\infty x(n)Z^{-n}$
Mở rộng chuỗi trên, chúng tôi nhận được;
$= X(0)Z^0+X(1)Z^{-1}+X(2)Z^{-2}+...\quad...$
$= X(0)\times 1+X(1)Z^{-1}+X(2)Z^{-2}+...\quad...$
Trong trường hợp trên nếu Z → ∞ thì $Z^{-n}\rightarrow 0$ (Vì n> 0)
Do đó, chúng ta có thể nói;
$\lim_{z \to \infty}X(z) = X(0)$ (Do đó đã được chứng minh)
Định lý giá trị cuối cùng
Định lý Giá trị Cuối cùng phát biểu rằng nếu biến đổi Z của một tín hiệu được biểu diễn là X (Z) và các cực đều nằm bên trong vòng tròn, thì giá trị cuối cùng của nó được biểu thị là x (n) hoặc X (∞) và có thể được viết dưới dạng -
$X(\infty) = \lim_{n \to \infty}X(n) = \lim_{z \to 1}[X(Z)(1-Z^{-1})]$
Conditions -
- Nó chỉ áp dụng cho các hệ thống nhân quả.
- $X(Z)(1-Z^{-1})$ nên có các cực bên trong vòng tròn đơn vị trong mặt phẳng Z.
Proof - Chúng tôi biết rằng
$Z^+[x(n+1)-x(n)] = \lim_{k \to \infty}\sum_{n=0}^kZ^{-n}[x(n+1)-x(n)]$
$\Rightarrow Z^+[x(n+1)]-Z^+[x(n)] = \lim_{k \to \infty}\sum_{n=0}^kZ^{-n}[x(n+1)-x(n)]$
$\Rightarrow Z[X(Z)^+-x(0)]-X(Z)^+ = \lim_{k \to \infty}\sum_{n = 0}^kZ^{-n}[x(n+1)-x(n)]$
Ở đây, chúng ta có thể áp dụng thuộc tính nâng cao của Chuyển đổi Z một phía. Vì vậy, phương trình trên có thể được viết lại thành;
$Z^+[x(n+1)] = Z[X(2)^+-x(0)Z^0] = Z[X(Z)^+-x(0)]$
Bây giờ đặt z = 1 vào phương trình trên, chúng ta có thể khai triển phương trình trên:
$\lim_{k \to \infty}{[x(1)-x(0)+x(6)-x(1)+x(3)-x(2)+...\quad...\quad...+x(x+1)-x(k)]}$
Điều này có thể được xây dựng dưới dạng;
$X(\infty) = \lim_{n \to \infty}X(n) = \lim_{z \to 1}[X(Z)(1-Z^{-1})]$(Do đó đã được chứng minh)
Thí dụ
Hãy để chúng tôi tìm giá trị ban đầu và cuối cùng của x (n) có tín hiệu được cho bởi
$X(Z) = 2+3Z^{-1}+4Z^{-2}$
Solution - Trước hết chúng ta hãy tìm giá trị ban đầu của tín hiệu bằng cách áp dụng định lý
$x(0) = \lim_{z \to \infty}X(Z)$
$= \lim_{z \to \infty}[2+3Z^{-1}+4Z^{-2}]$
$= 2+(\frac{3}{\infty})+(\frac{4}{\infty}) = 2$
Bây giờ chúng ta hãy tìm giá trị cuối cùng của tín hiệu áp dụng định lý
$x(\infty) = \lim_{z \to \infty}[(1-Z^{-1})X(Z)]$
$= \lim_{z \to \infty}[(1-Z^{-1})(2+3Z^{-1}+4Z^{-2})]$
$= \lim_{z \to \infty}[2+Z^{-1}+Z^{-2}-4Z^{-3}]$
$= 2+1+1-4 = 0$
Some other properties of Z-transform are listed below -
Sự khác biệt về tần số
Nó cung cấp cho sự thay đổi trong miền Z của tín hiệu, khi tín hiệu rời rạc của nó được phân biệt theo thời gian.
$nx(n)\longleftrightarrow -Z\frac{dX(z)}{dz}$
ROC của nó có thể được viết là;
$r_2< Mod(Z)< r_1$
Thí dụ
Hãy để chúng tôi tìm giá trị của x (n) thông qua Phân biệt tần số, tín hiệu rời rạc trong miền Z được cho bởi $x(n)\longleftrightarrow X(Z) = log(1+aZ^{-1})$
Theo tài sản, chúng tôi có thể viết rằng
$nx(n)\longleftrightarrow -Z\frac{dx(Z)}{dz}$
$= -Z[\frac{-aZ^{-2}}{1+aZ^{-1}}]$
$= (aZ^{-1})/(1+aZ^{-1})$
$= 1-1/(1+aZ^{-1})$
$nx(n) = \delta(n)-(-a)^nu(n)$
$\Rightarrow x(n) = 1/n[\delta(n)-(-a)^nu(n)]$
Nhân trong thời gian
Nó đưa ra sự thay đổi trong miền Z của tín hiệu khi phép nhân diễn ra ở mức tín hiệu rời rạc.
$x_1(n).x_2(n)\longleftrightarrow(\frac{1}{2\Pi j})[X1(Z)*X2(Z)]$
Liên hợp trong thời gian
Điều này mô tả sự biểu diễn của tín hiệu rời rạc liên hợp trong miền Z.
$X^*(n)\longleftrightarrow X^*(Z^*)$
Một hệ thống, có chức năng hệ thống, chỉ có thể ổn định nếu tất cả các cực nằm bên trong vòng tròn đơn vị. Đầu tiên, chúng tôi kiểm tra xem hệ thống có quan hệ nhân quả hay không. Nếu hệ thống là Nhân quả, thì chúng tôi đi xác định độ ổn định BIBO của nó; trong đó độ ổn định BIBO đề cập đến đầu vào bị giới hạn cho điều kiện đầu ra bị giới hạn.
Điều này có thể được viết là;
$Mod(X(Z))< \infty$
$= Mod(\sum x(n)Z^{-n})< \infty$
$= \sum Mod(x(n)Z^{-n})< \infty$
$= \sum Mod[x(n)(re^{jw})^{-n}]< 0$
$= \sum Mod[x(n)r^{-n}]Mod[e^{-jwn}]< \infty$
$= \sum_{n = -\infty}^\infty Mod[x(n)r^{-n}]< \infty$
Phương trình trên chỉ ra điều kiện tồn tại của biến đổi Z.
Tuy nhiên, điều kiện để tồn tại tín hiệu DTFT là
$$\sum_{n = -\infty}^\infty Mod(x(n)< \infty$$ví dụ 1
Chúng ta hãy thử tìm ra phép biến đổi Z của tín hiệu, được cho là
$x(n) = -(-0.5)^{-n}u(-n)+3^nu(n)$
$= -(-2)^nu(n)+3^nu(n)$
Solution - Đây, cho $-(-2)^nu(n)$ ROC là mặt trái và Z <2
Đối với $3^nu(n)$ ROC là mặt phải và Z> 3
Do đó, ở đây biến đổi Z của tín hiệu sẽ không tồn tại vì không có vùng chung.
Ví dụ 2
Chúng ta hãy thử tìm ra biến đổi Z của tín hiệu được cho bởi
$x(n) = -2^nu(-n-1)+(0.5)^nu(n)$
Solution - Đây, cho $-2^nu(-n-1)$ ROC của tín hiệu là Mặt trái và Z <2
Đối với tín hiệu $(0.5)^nu(n)$ ROC là mặt phải và Z> 0,5
Vì vậy, ROC chung được hình thành là 0,5 <Z <2
Do đó, biến đổi Z có thể được viết dưới dạng;
$X(Z) = \lbrace\frac{1}{1-2Z^{-1}}\rbrace+\lbrace\frac{1}{(1-0.5Z)^{-1}}\rbrace$
Ví dụ 3
Chúng ta hãy thử tìm ra phép biến đổi Z của tín hiệu, được cho là $x(n) = 2^{r(n)}$
Solution- r (n) là tín hiệu đường dốc. Vì vậy, tín hiệu có thể được viết là;
$x(n) = 2^{nu(n)}\lbrace 1, n<0 (u(n)=0)\quad and\quad2^n, n\geq 0(u(n) = 1)\rbrace$
$= u(-n-1)+2^nu(n)$
Đây, cho tín hiệu $u(-n-1)$ và ROC Z <1 và cho $2^nu(n)$ với ROC là Z> 2.
Vì vậy, biến đổi Z của tín hiệu sẽ không tồn tại.
Z -Transform cho Hệ thống Nhân quả
Hệ thống nhân quả có thể được định nghĩa là $h(n) = 0,n<0$. Đối với hệ thống nhân quả, ROC sẽ nằm ngoài vòng tròn trong mặt phẳng Z.
$H(Z) = \displaystyle\sum\limits_{n = 0}^{\infty}h(n)Z^{-n}$
Mở rộng phương trình trên,
$H(Z) = h(0)+h(1)Z^{-1}+h(2)Z^{-2}+...\quad...\quad...$
$= N(Z)/D(Z)$
Đối với hệ thống nhân quả, mở rộng Hàm truyền không bao gồm lũy thừa dương của Z. Đối với hệ thống nhân quả, thứ tự của tử số không được vượt quá thứ tự của mẫu số. Điều này có thể được viết là-
$\lim_{z \rightarrow \infty}H(Z) = h(0) = 0\quad or\quad Finite$
Để ổn định hệ thống nhân quả, các cực của hàm Truyền phải nằm bên trong vòng tròn đơn vị trong mặt phẳng Z.
Biến đổi Z cho Hệ thống chống nhân quả
Hệ thống chống nhân quả có thể được định nghĩa là $h(n) = 0, n\geq 0$. Đối với hệ thống chống nhân quả, các cực của hàm truyền phải nằm bên ngoài vòng tròn đơn vị trong mặt phẳng Z. Đối với hệ thống chống nhân quả, ROC sẽ nằm bên trong vòng tròn trong mặt phẳng Z.
Nếu chúng ta muốn phân tích một hệ thống, đã được biểu diễn trong miền tần số, dưới dạng tín hiệu thời gian rời rạc thì chúng ta chuyển sang phép biến đổi Z ngược.
Về mặt toán học, nó có thể được biểu diễn dưới dạng;
$$x(n) = Z^{-1}X(Z)$$trong đó x (n) là tín hiệu trong miền thời gian và X (Z) là tín hiệu trong miền tần số.
Nếu chúng ta muốn biểu diễn phương trình trên ở dạng tích phân thì chúng ta có thể viết nó dưới dạng
$$x(n) = (\frac{1}{2\Pi j})\oint X(Z)Z^{-1}dz$$Ở đây, tích phân nằm trên một đường đóng C. Đường này nằm trong ROC của x (z) và nó chứa gốc.
Phương pháp tìm biến đổi Z ngược
Khi cần phân tích ở định dạng rời rạc, chúng ta chuyển tín hiệu miền tần số trở lại định dạng rời rạc thông qua phép biến đổi Z ngược. Chúng ta làm theo bốn cách sau đây để xác định phép biến đổi Z nghịch đảo.
- Phương pháp phân chia dài
- Phương pháp mở rộng phân số từng phần
- Phương pháp tích phân dư hoặc đường bao
Phương pháp phân chia dài
Trong phương pháp này, biến đổi Z của tín hiệu x (z) có thể được biểu diễn dưới dạng tỷ số của đa thức như hình dưới đây;
$$x(z)=N(Z)/D(Z)$$Bây giờ, nếu chúng ta tiếp tục chia tử số cho mẫu số, thì chúng ta sẽ nhận được một chuỗi như hình dưới đây
$$X(z) = x(0)+x(1)Z^{-1}+x(2)Z^{-2}+...\quad...\quad...$$Chuỗi trên đại diện cho chuỗi biến đổi nghịch đảo Z của tín hiệu đã cho (với n≥0) và hệ thống trên là quan hệ nhân quả.
Tuy nhiên với n <0, chuỗi có thể được viết là;
$$x(z) = x(-1)Z^1+x(-2)Z^2+x(-3)Z^3+...\quad...\quad...$$Phương pháp mở rộng phân số từng phần
Ở đây tín hiệu cũng được biểu diễn đầu tiên ở dạng N (z) / D (z).
Nếu nó là một phân số hữu tỉ, nó sẽ được biểu diễn như sau;
$x(z) = b_0+b_1Z^{-1}+b_2Z^{-2}+...\quad...\quad...+b_mZ^{-m})/(a_0+a_1Z^{-1}+a_2Z^{-2}+...\quad...\quad...+a_nZ^{-N})$
Điều trên là không đúng khi m <n và một ≠ 0
Nếu tỷ lệ không đúng (tức là không đúng), thì ta phải chuyển nó về dạng thích hợp để giải quyết nó.
Dư lượng hoặc Phương pháp tích phân đường viền
Trong phương pháp này, chúng ta thu được biến đổi Z nghịch đảo x (n) bằng cách tính tổng các phần dư của $[x(z)Z^{n-1}]$ở tất cả các cực. Về mặt toán học, điều này có thể được biểu thị bằng
$$x(n) = \displaystyle\sum\limits_{all\quad poles\quad X(z)}residues\quad of[x(z)Z^{n-1}]$$Ở đây, phần dư cho bất kỳ cực nào của thứ tự m tại $z = \beta$ Là
$$Residues = \frac{1}{(m-1)!}\lim_{Z \rightarrow \beta}\lbrace \frac{d^{m-1}}{dZ^{m-1}}\lbrace (z-\beta)^mX(z)Z^{n-1}\rbrace$$ví dụ 1
Tìm phản ứng của hệ thống $s(n+2)-3s(n+1)+2s(n) = \delta (n)$, khi tất cả các điều kiện ban đầu bằng không.
Solution - Lấy biến đổi Z về cả hai vế của phương trình trên, ta được
$$S(z)Z^2-3S(z)Z^1+2S(z) = 1$$$\Rightarrow S(z)\lbrace Z^2-3Z+2\rbrace = 1$
$\Rightarrow S(z) = \frac{1}{\lbrace z^2-3z+2\rbrace}=\frac{1}{(z-2)(z-1)} = \frac{\alpha _1}{z-2}+\frac{\alpha _2}{z-1}$
$\Rightarrow S(z) = \frac{1}{z-2}-\frac{1}{z-1}$
Lấy biến đổi Z nghịch đảo của phương trình trên, chúng ta nhận được
$S(n) = Z^{-1}[\frac{1}{Z-2}]-Z^{-1}[\frac{1}{Z-1}]$
$= 2^{n-1}-1^{n-1} = -1+2^{n-1}$
Ví dụ 2
Tìm hàm hệ thống H (z) và phản ứng mẫu đơn vị h (n) của hệ thống có phương trình sai khác được mô tả dưới đây
$y(n) = \frac{1}{2}y(n-1)+2x(n)$
trong đó, y (n) và x (n) lần lượt là đầu ra và đầu vào của hệ thống.
Solution - Lấy biến đổi Z của phương trình sai phân trên, ta được
$y(z) = \frac{1}{2}Z^{-1}Y(Z)+2X(z)$
$= Y(Z)[1-\frac{1}{2}Z^{-1}] = 2X(Z)$
$= H(Z) = \frac{Y(Z)}{X(Z)} = \frac{2}{[1-\frac{1}{2}Z^{-1}]}$
Hệ thống này có cực tại $Z = \frac{1}{2}$ và $Z = 0$ và $H(Z) = \frac{2}{[1-\frac{1}{2}Z^{-1}]}$
Do đó, thực hiện phép biến đổi Z nghịch đảo ở trên, chúng ta nhận được
$h(n) = 2(\frac{1}{2})^nU(n)$
Ví dụ 3
Xác định Y (z), n≥0 trong trường hợp sau:
$y(n)+\frac{1}{2}y(n-1)-\frac{1}{4}y(n-2) = 0\quad given\quad y(-1) = y(-2) = 1$
Solution - Áp dụng biến đổi Z vào phương trình trên, ta được
$Y(Z)+\frac{1}{2}[Z^{-1}Y(Z)+Y(-1)]-\frac{1}{4}[Z^{-2}Y(Z)+Z^{-1}Y(-1)+4(-2)] = 0$
$\Rightarrow Y(Z)+\frac{1}{2Z}Y(Z)+\frac{1}{2}-\frac{1}{4Z^2}Y(Z)-\frac{1}{4Z}-\frac{1}{4} = 0$
$\Rightarrow Y(Z)[1+\frac{1}{2Z}-\frac{1}{4Z^2}] =\frac{1}{4Z}-\frac{1}{2}$
$\Rightarrow Y(Z)[\frac{4Z^2+2Z-1}{4Z^2}] = \frac{1-2Z}{4Z}$
$\Rightarrow Y(Z) = \frac{Z(1-2Z)}{4Z^2+2Z-1}$
Giống như biến đổi Fourier tín hiệu thời gian liên tục, biến đổi Fourier thời gian rời rạc có thể được sử dụng để biểu diễn một chuỗi rời rạc thành biểu diễn miền tần số tương đương của nó và hệ thống thời gian rời rạc LTI và phát triển các thuật toán tính toán khác nhau.
X (jω) trong FT liên tục, là một hàm liên tục của x (n). Tuy nhiên, DFT đề cập đến việc biểu diễn x (n) với các mẫu phổ của nó X (ω). Do đó, công cụ toán học này mang nhiều tầm quan trọng về mặt tính toán trong việc biểu diễn thuận tiện. Cả hai trình tự tuần hoàn và không tuần hoàn đều có thể được xử lý thông qua công cụ này. Các trình tự tuần hoàn cần được lấy mẫu bằng cách kéo dài chu kỳ đến vô cùng.
Lấy mẫu miền tần số
Từ phần mở đầu, rõ ràng là chúng ta cần biết cách tiến hành lấy mẫu miền tần số tức là lấy mẫu X (ω). Do đó, mối quan hệ giữa biến đổi Fourier được lấy mẫu và DFT được thiết lập theo cách sau.
Tương tự, các chuỗi tuần hoàn có thể phù hợp với công cụ này bằng cách kéo dài chu kỳ N đến vô cùng.
Cho một chuỗi không tuần hoàn, $X(n) = \lim_{N \to \infty}x_N(n)$
Xác định phép biến đổi Fourier của nó,
$X(\omega ) = \sum_{n=-\infty}^\infty x(n)e^{-jwn}X(K\delta \omega)$
Ở đây, X (ω) được lấy mẫu định kỳ, tại mọi khoảng radian δω.
Vì X (ω) tuần hoàn tính bằng 2π radian, chúng tôi chỉ yêu cầu các mẫu trong phạm vi cơ bản. Các mẫu được lấy sau những khoảng thời gian cách đều nhau trong dải tần 0≤ω≤2π. Khoảng cách giữa các khoảng tương đương là$\delta \omega = \frac{2\pi }{N}k$ rađian.
Bây giờ đang đánh giá, $\omega = \frac{2\pi}{N}k$
$X(\frac{2\pi}{N}k) = \sum_{n = -\infty}^\infty x(n)e^{-j2\pi nk/N},$ ... eq (2)
trong đó k = 0,1, …… N-1
Sau khi chia nhỏ ở trên, và hoán đổi thứ tự tổng kết
$X(\frac{2\pi}{N}k) = \displaystyle\sum\limits_{n = 0}^{N-1}[\displaystyle\sum\limits_{l = -\infty}^\infty x(n-Nl)]e^{-j2\pi nk/N}$ ... eq (3)
$\sum_{l=-\infty}^\infty x(n-Nl) = x_p(n) = a\quad periodic\quad function\quad of\quad period\quad N\quad and\quad its\quad fourier\quad series\quad = \sum_{k = 0}^{N-1}C_ke^{j2\pi nk/N}$
trong đó, n = 0,1,… .., N-1; 'p'- là viết tắt của thực thể hoặc hàm tuần hoàn
Các hệ số Fourier là,
$C_k = \frac{1}{N}\sum_{n = 0}^{N-1}x_p(n)e^{-j2\pi nk/N}$k = 0,1,…, N-1 ... eq (4)
So sánh phương trình 3 và 4, ta được;
$NC_k = X(\frac{2\pi}{N}k)$k = 0,1,…, N-1 ... eq (5)
$NC_k = X(\frac{2\pi}{N}k) = X(e^{jw}) = \displaystyle\sum\limits_{n = -\infty}^\infty x_p(n)e^{-j2\pi nk/N}$... eq (6)
Từ mở rộng chuỗi Fourier,
$x_p(n) = \frac{1}{N}\displaystyle\sum\limits_{k = 0}^{N-1}NC_ke^{j2\pi nk/N} = \frac{1}{N}\sum_{k = 0}^{N-1}X(\frac{2\pi}{N}k)e^{j2\pi nk/N}$... eq (7)
Trong đó n = 0,1,…, N-1
Ở đây, chúng tôi nhận được tín hiệu tuần hoàn từ X (ω). $x(n)$ có thể được trích xuất từ $x_p(n)$ chỉ, nếu không có răng cưa trong miền thời gian. $N\geq L$
N = khoảng thời gian $x_p(n)$ L = khoảng thời gian $x(n)$
$x(n) = \begin{cases}x_p(n), & 0\leq n\leq N-1\\0, & Otherwise\end{cases}$
Việc lập bản đồ đạt được theo cách này.
Thuộc tính của DFT
Tuyến tính
Nó nói rằng DFT của một tổ hợp các tín hiệu bằng tổng DFT của các tín hiệu riêng lẻ. Chúng ta hãy lấy hai tín hiệu x 1 (n) và x 2 (n), có DFT s lần lượt là X 1 (ω) và X 2 (ω). Vì thế nếu
$x_1(n)\rightarrow X_1(\omega)$và$x_2(n)\rightarrow X_2(\omega)$
Sau đó $ax_1(n)+bx_2(n)\rightarrow aX_1(\omega)+bX_2(\omega)$
Ở đâu a và b là các hằng số.
Đối diện
Các thuộc tính đối xứng của DFT có thể được suy ra theo cách tương tự như chúng ta suy ra các thuộc tính đối xứng DTFT. Chúng ta biết rằng DFT của dãy x (n) được ký hiệu là X (K). Bây giờ, nếu x (n) và X (K) là chuỗi có giá trị phức tạp, thì nó có thể được biểu diễn dưới dạng
$x(n) = x_R(n)+jx_1(n),0\leq n\leq N-1$
Và $X(K) = X_R(K)+jX_1(K),0\leq K\leq N-1$
Thuộc tính đối ngẫu
Chúng ta hãy xem xét một tín hiệu x (n), có DFT được cho là X (K). Cho chuỗi thời lượng hữu hạn là X (N). Sau đó, theo định lý đối ngẫu,
Nếu, $x(n)\longleftrightarrow X(K)$
Sau đó, $X(N)\longleftrightarrow Nx[((-k))_N]$
Vì vậy, bằng cách sử dụng định lý này nếu chúng ta biết DFT, chúng ta có thể dễ dàng tìm thấy chuỗi thời gian hữu hạn.
Thuộc tính liên hợp phức tạp
Giả sử, có một tín hiệu x (n), mà DFT của chúng còn được gọi là X (K). Bây giờ, nếu liên hợp phức của tín hiệu được cho là x * (n), thì chúng ta có thể dễ dàng tìm DFT mà không cần thực hiện nhiều phép tính bằng cách sử dụng định lý được hiển thị bên dưới.
Nếu, $x(n)\longleftrightarrow X(K)$
Sau đó, $x*(n)\longleftrightarrow X*((K))_N = X*(N-K)$
Dịch chuyển tần số vòng tròn
Phép nhân dãy số x (n) với dãy số mũ phức $e^{j2\Pi kn/N}$tương đương với sự dịch chuyển tròn của DFT theo L đơn vị tần số. Đây là đặc tính kép đối với dịch chuyển thời gian vòng tròn.
Nếu, $x(n)\longleftrightarrow X(K)$
Sau đó, $x(n)e^{j2\Pi Kn/N}\longleftrightarrow X((K-L))_N$
Phép nhân hai dãy
Nếu có hai tín hiệu x 1 (n) và x 2 (n) và DFT tương ứng của chúng là X 1 (k) và X 2 (K), thì phép nhân các tín hiệu trong chuỗi thời gian tương ứng với tích chập tròn của DFT của chúng.
Nếu, $x_1(n)\longleftrightarrow X_1(K)\quad\&\quad x_2(n)\longleftrightarrow X_2(K)$
Sau đó, $x_1(n)\times x_2(n)\longleftrightarrow X_1(K)© X_2(K)$
Định lý Parseval
Đối với các chuỗi có giá trị phức tạp x (n) và y (n), nói chung
Nếu, $x(n)\longleftrightarrow X(K)\quad \&\quad y(n)\longleftrightarrow Y(K)$
Sau đó, $\sum_{n = 0}^{N-1}x(n)y^*(n) = \frac{1}{N}\sum_{k = 0}^{N-1}X(K)Y^*(K)$
Chúng tôi biết rằng khi $\omega = 2\pi K/N$ và $N\rightarrow \infty,\omega$ trở thành một biến liên tục và giới hạn tổng trở thành $-\infty$ đến $+\infty$.
Vì thế,
$$NC_k = X(\frac{2\pi}{N}k) = X(e^{j\omega}) = \displaystyle\sum\limits_{n = -\infty}^\infty x(n)e^{\frac{-j2\pi nk}{N}} = \displaystyle\sum\limits_{n = -\infty}^\infty x(n)e^{-j\omega n}$$Biến đổi Fourier thời gian rời rạc (DTFT)
Chúng ta biết rằng, $X(e^{j\omega}) = \sum_{n = -\infty}^\infty x(n)e^{-j\omega n}$
Ở đâu, $X(e^{j\omega})$là liên tục và tuần hoàn trong ω và với chu kỳ 2π. … Eq (1)
Hiện nay,
$x_p(n) = \sum_{k = 0}^{N-1}NC_ke^{j2 \pi nk/N}$ … Từ chuỗi Fourier
$x_p(n) = \frac{1}{2\pi}\sum_{k=0}^{N-1}NC_ke^{j2\pi nk/N}\times \frac{2\pi}{N}$
ω trở nên liên tục và $\frac{2\pi}{N}\rightarrow d\omega$, bởi vì những lý do được trích dẫn ở trên.
$x(n) = \frac{1}{2\pi}\int_{n = 0}^{2\pi}X(e^{j\omega})e^{j\omega n}d\omega$… Eq (2)
Biến đổi Fourier thời gian rời rạc nghịch đảo
Nói một cách hình tượng,
$x(n)\Longleftrightarrow x(e^{j\omega})$(Cặp biến đổi Fourier)
Điều kiện cần và đủ để tồn tại Biến đổi Fourier Thời gian Rời rạc cho một chuỗi không tuần hoàn x (n) là tổng tuyệt đối.
I E$\sum_{n = -\infty}^\infty|x(n)|<\infty$
Thuộc tính của DTFT
Linearity : $a_1x_1(n)+a_2x_2(n)\Leftrightarrow a_1X_1(e^{j\omega})+a_2X_2(e^{j\omega})$
Time shifting - $x(n-k)\Leftrightarrow e^{-j\omega k}.X(e^{j\omega})$
Time Reversal - $x(-n)\Leftrightarrow X(e^{-j\omega})$
Frequency shifting - $e^{j\omega _0n}x(n)\Leftrightarrow X(e^{j(\omega -\omega _0)})$
Differentiation frequency domain - $nx(n) = j\frac{d}{d\omega}X(e^{j\omega})$
Convolution - $x_1(n)*x_2(n)\Leftrightarrow X_1(e^{j\omega})\times X_2(e^{j\omega})$
Multiplication - $x_1(n)\times x_2(n)\Leftrightarrow X_1(e^{j\omega})*X_2(e^{j\omega})$
Co-relation - $y_{x_1\times x_2}(l)\Leftrightarrow X_1(e^{j\omega})\times X_2(e^{j\omega})$
Modulation theorem - $x(n)\cos \omega _0n = \frac{1}{2}[X_1(e^{j(\omega +\omega _0})*X_2(e^{jw})$
Symmetry -$x^*(n)\Leftrightarrow X^*(e^{-j\omega})$ ;
$x^*(-n)\Leftrightarrow X^*(e^{j\omega})$ ;
$Real[x(n)]\Leftrightarrow X_{even}(e^{j\omega})$ ;
$Imag[x(n)]\Leftrightarrow X_{odd}(e^{j\omega})$ ;
$x_{even}(n)\Leftrightarrow Real[x(e^{j\omega})]$ ;
$x_{odd}(n)\Leftrightarrow Imag[x(e^{j\omega})]$ ;
Parseval’s theorem - $\sum_{-\infty}^\infty|x_1(n)|^2 = \frac{1}{2\pi}\int_{-\pi}^{\pi}|X_1(e^{j\omega})|^2d\omega$
Trước đó, chúng tôi đã nghiên cứu lấy mẫu trong miền tần số. Với kiến thức cơ bản đó, chúng tôi lấy mẫu$X(e^{j\omega})$trong miền tần số, để có thể thực hiện phân tích kỹ thuật số thuận tiện từ dữ liệu được lấy mẫu đó. Do đó, DFT được lấy mẫu trong cả miền thời gian và miền tần số. Với giả định$x(n) = x_p(n)$
Do đó, DFT được đưa ra bởi -
$X(k) = DFT[x(n)] = X(\frac{2\pi}{N}k) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)e^{-\frac{j2\pi nk}{N}}$, k = 0,1,…., n − 1 … eq (3)
Và IDFT được cung cấp bởi -
$X(n) = IDFT[X(k)] = \frac{1}{N}\sum_{k = 0}^{N-1}X(k)e^{\frac{j2\pi nk}{N}}$, n = 0,1,…., n − 1 … eq (4)
$\therefore x(n)\Leftrightarrow X(k)$
Yếu tố Twiddle
Nó được biểu thị là $W_N$ và được định nghĩa là $W_N = e^{-j2\pi /N}$. Độ lớn của nó luôn được duy trì ở mức thống nhất. Giai đoạn$W_N = -2\pi /N$. Nó là một vector trên vòng tròn đơn vị và được sử dụng để thuận tiện cho việc tính toán. Về mặt toán học, nó có thể được hiển thị như sau:
$W_N^r = W_N^{r\pm N} = W_N^{r\pm 2N} = ...$
Nó là hàm của r và chu kỳ N.
Xét N = 8, r = 0,1,2,3,… .14,15,16,….
$\Longleftrightarrow W_8^0 = W_8^8 = W_8^{16} = ... = ... = W_8^{32} = ... =1= 1\angle 0$
$W_8^1 = W_8^9 = W_8^{17} = ... = ... = W_8^{33} = ... =\frac{1}{\sqrt 2}= j\frac{1}{\sqrt 2} = 1\angle-\frac{\pi}{4}$
Chuyển đổi tuyến tính
Hãy để chúng tôi hiểu về Chuyển đổi Tuyến tính -
Chúng ta biết rằng,
$DFT(k) = DFT[x(n)] = X(\frac{2\pi}{N}k) = \sum_{n = 0}^{N-1}x(n).W_n^{-nk};\quad k = 0,1,….,N−1$
$x(n) = IDFT[X(k)] = \frac{1}{N}\sum_{k = 0}^{N-1}X(k).W_N^{-nk};\quad n = 0,1,….,N−1$
Note- Tính toán DFT có thể được thực hiện với N 2 phép nhân phức và N (N-1) phép cộng phức.
$x_N = \begin{bmatrix}x(0)\\x(1)\\.\\.\\x(N-1) \end{bmatrix}\quad N\quad point\quad vector\quad of\quad signal\quad x_N$
$X_N = \begin{bmatrix}X(0)\\X(1)\\.\\.\\X(N-1) \end{bmatrix}\quad N\quad point\quad vector\quad of\quad signal\quad X_N$
$\begin{bmatrix}1 & 1 & 1 & ... & ... & 1\\1 & W_N & W_N^2 & ... & ... & W_N^{N-1}\\. & W_N^2 & W_N^4 & ... & ... & W_N^{2(N-1)}\\.\\1 & W_N^{N-1} & W_N^{2(N-1)} & ... & ... & W_N^{(N-1)(N-1)} \end{bmatrix}$
DFT điểm N trong số hạng ma trận được cho bởi - $X_N = W_Nx_N$
$W_N\longmapsto$ Ma trận biến đổi tuyến tính
$Now,\quad x_N = W_N^{-1}X_N$
IDFT ở dạng Ma trận được cung cấp bởi
$$x_N = \frac{1}{N}W_N^*X_N$$So sánh cả hai biểu thức của $x_N,\quad W_N^{-1} = \frac{1}{N}W_N^*$ và $W_N\times W_N^* = N[I]_{N\times N}$
Vì thế, $W_N$ là một ma trận biến đổi tuyến tính, một ma trận trực giao (đơn nhất).
Từ tài sản định kỳ của $W_N$ và từ tính chất đối xứng của nó, có thể kết luận rằng, $W_N^{k+N/2} = -W_N^k$
Đối xứng tròn
DFT điểm N của một khoảng thời gian hữu hạn x (n) với độ dài N≤L, tương đương với DFT điểm N của phần mở rộng tuần hoàn của x (n), tức là $x_p(n)$ của thời kỳ N. và $x_p(n) = \sum_{l = -\infty}^\infty x(n-Nl)$. Bây giờ, nếu chúng ta dịch chuyển dãy, là một dãy tuần hoàn k đơn vị sang bên phải, thì sẽ thu được một dãy tuần hoàn khác. Điều này được gọi là sự thay đổi vòng tròn và điều này được đưa ra bởi,
$$x_p^\prime (n) = x_p(n-k) = \sum_{l = -\infty}^\infty x(n-k-Nl)$$Chuỗi hữu hạn mới có thể được biểu diễn dưới dạng
$$x_p^\prime (n) = \begin{cases}x_p^\prime(n), & 0\leq n\leq N-1\\0 & Otherwise\end{cases}$$Example - Cho x (n) = {1,2,4,3}, N = 4,
$x_p^\prime (n) = x(n-k,modulo\quad N)\equiv x((n-k))_N\quad;ex-if\quad k=2i.e\quad 2\quad unit\quad right\quad shift\quad and\quad N = 4,$
Giả sử chiều kim đồng hồ là chiều dương.
Chúng tôi có, $x\prime(n) = x((n-2))_4$
$x\prime(0) = x((-2))_4 = x(2) = 4$
$x\prime(1) = x((-1))_4 = x(3) = 3$
$x\prime(2) = x((-2))_4 = x(0) = 1$
$x\prime(3) = x((1))_4 = x(1) = 2$
Conclusion - Chuyển dịch tròn của dãy điểm N tương đương với chuyển dịch tuyến tính kéo dài tuần hoàn của nó và ngược lại.
Chuỗi chẵn tròn - $x(N-n) = x(n),\quad 1\leq n\leq N-1$
$i.e.x_p(n) = x_p(-n) = x_p(N-n)$
Kết hợp thậm chí -$x_p(n) = x_p^*(N-n)$
Chuỗi số lẻ tròn - $x(N-n) = -x(n),\quad 1\leq n\leq N-1$
$i.e.x_p(n) = -x_p(-n) = -x_p(N-n)$
Liên hợp lẻ - $x_p(n) = -x_p^*(N-n)$
Hiện nay, $x_p(n) = x_{pe}+x_{po}(n)$, Ở đâu,
$x_{pe}(n) = \frac{1}{2}[x_p(n)+x_p^*(N-n)]$
$x_{po}(n) = \frac{1}{2}[x_p(n)-x_p^*(N-n)]$
Đối với bất kỳ tín hiệu thực x (n) nào,$X(k) = X^*(N-k)$
$X_R(k) = X_R(N-k)$
$X_l(k) = -X_l(N-k)$
$\angle X(k) = -\angle X(N-K)$
Time reversal- đảo mẫu về mẫu thứ 0 . Điều này được đưa ra là;
$x((-n))_N = x(N-n),\quad 0\leq n\leq N-1$
Đảo ngược thời gian là vẽ các mẫu theo trình tự, theo chiều kim đồng hồ, tức là theo chiều âm giả định.
Một số thuộc tính quan trọng khác
Các thuộc tính IDFT quan trọng khác $x(n)\longleftrightarrow X(k)$
Time reversal - $x((-n))_N = x(N-n)\longleftrightarrow X((-k))_N = X(N-k)$
Circular time shift - $x((n-l))_N \longleftrightarrow X(k)e^{j2\pi lk/N}$
Circular frequency shift - $x(n)e^{j2\pi ln/N} \longleftrightarrow X((k-l))_N$
Complex conjugate properties -
$x^*(n)\longleftrightarrow X^*((-k))_N = X^*(N-k)\quad and$
$x^*((-n))_N = x^*(N-n)\longleftrightarrow X^*(-k)$
Multiplication of two sequence -
$x_1(n)\longleftrightarrow X_1(k)\quad and\quad x_2(n)\longleftrightarrow X_2(k)$
$\therefore x_1(n)x_2(n)\longleftrightarrow X_1(k)\quadⓃ X_2(k)$
Circular convolution - và phép nhân hai DFT
$x_1(k)\quad Ⓝ x_2(k) =\sum_{k = 0}^{N-1}x_1(n).x_2((m-n))_n,\quad m = 0,1,2,... .,N-1 $
$x_1(k)\quad Ⓝ x_2(k)\longleftrightarrow X_1(k).X_2(k)$
Circular correlation - Nếu $x(n)\longleftrightarrow X(k)$ và $y(n)\longleftrightarrow Y(k)$ , thì tồn tại một chuỗi tương quan chéo được biểu thị là $\bar Y_{xy}$ như vậy mà $\bar Y_{xy}(l) = \sum_{n = 0}^{N-1}x(n)y^*((n-l))_N = X(k).Y^*(k)$
Parseval’s Theorem - Nếu $x(n)\longleftrightarrow X(k)$ và $y(n)\longleftrightarrow Y(k)$;
$\displaystyle\sum\limits_{n = 0}^{N-1}x(n)y^*(n) = \frac{1}{N}\displaystyle\sum\limits_{n =0}^{N-1}X(k).Y^*(k)$
Chúng ta hãy lấy hai chuỗi thời lượng hữu hạn x 1 (n) và x 2 (n), có độ dài nguyên là N. DFT của chúng lần lượt là X 1 (K) và X 2 (K), được hiển thị bên dưới:
$$X_1(K) = \sum_{n = 0}^{N-1}x_1(n)e^{\frac{j2\Pi kn}{N}}\quad k = 0,1,2...N-1$$ $$X_2(K) = \sum_{n = 0}^{N-1}x_2(n)e^{\frac{j2\Pi kn}{N}}\quad k = 0,1,2...N-1$$Bây giờ, chúng ta sẽ cố gắng tìm DFT của một dãy khác x 3 (n), được cho là X 3 (K)
$X_3(K) = X_1(K)\times X_2(K)$
Bằng cách lấy IDFT ở trên, chúng tôi nhận được
$x_3(n) = \frac{1}{N}\displaystyle\sum\limits_{n = 0}^{N-1}X_3(K)e^{\frac{j2\Pi kn}{N}}$
Sau khi giải phương trình trên, cuối cùng, chúng ta nhận được
$x_3(n) = \displaystyle\sum\limits_{m = 0}^{N-1}x_1(m)x_2[((n-m))_N]\quad m = 0,1,2...N-1$
| Điểm so sánh | Chuyển đổi tuyến tính | Chuyển đổi vòng tròn |
|---|---|---|
| Dịch chuyển | Dịch chuyển tuyến tính | Dịch chuyển vòng tròn |
| Các mẫu trong kết quả tích chập | $N_1+N_2−1$ | $Max(N_1,N_2)$ |
| Tìm phản hồi của bộ lọc | Khả thi | Có thể có không đệm |
Phương pháp chuyển đổi vòng tròn
Nói chung, có hai phương pháp được áp dụng để thực hiện phép tích chập vòng và chúng -
- Phương pháp vòng tròn đồng tâm,
- Phương pháp nhân ma trận.
Phương pháp vòng tròn đồng tâm
Để cho $x_1(n)$ và $x_2(n)$là hai chuỗi đã cho. Các bước tiếp theo cho tích chập tròn của$x_1(n)$ và $x_2(n)$ Chúng tôi
Lấy hai đường tròn đồng tâm. Lô N mẫu của$x_1(n)$ trên chu vi của vòng tròn ngoài (duy trì khoảng cách bằng nhau các điểm liên tiếp) theo hướng ngược chiều kim đồng hồ.
Cho âm mưu $x_2(n)$, vẽ N mẫu của $x_2(n)$theo chiều kim đồng hồ trên vòng tròn bên trong, mẫu ban đầu được đặt ở cùng điểm với mẫu thứ 0 của$x_1(n)$
Nhân các mẫu tương ứng trên hai vòng tròn và thêm chúng để có đầu ra.
Xoay vòng tròn bên trong ngược chiều kim đồng hồ với từng mẫu một.
Phương pháp nhân ma trận
Phương pháp ma trận biểu diễn hai dãy đã cho $x_1(n)$ và $x_2(n)$ ở dạng ma trận.
Một trong các trình tự đã cho được lặp lại thông qua chuyển dịch tròn của từng mẫu một để tạo thành ma trận NXN.
Dãy còn lại được biểu diễn dưới dạng ma trận cột.
Phép nhân hai ma trận cho kết quả là tích chập tròn.
DFT cung cấp một cách tiếp cận thay thế cho tích chập miền thời gian. Nó có thể được sử dụng để thực hiện lọc tuyến tính trong miền tần số.
Vì vậy,$Y(\omega) = X(\omega).H(\omega)\longleftrightarrow y(n)$.
Vấn đề trong cách tiếp cận miền tần số này là $Y(\omega)$, $X(\omega)$ và $H(\omega)$là hàm liên tục của ω, không có hiệu quả đối với tính toán kỹ thuật số trên máy tính. Tuy nhiên, DFT cung cấp phiên bản lấy mẫu của các dạng sóng này để giải quyết mục đích.
Ưu điểm là, có kiến thức về các kỹ thuật DFT nhanh hơn như FFT, một thuật toán tính toán hiệu quả cao hơn có thể được phát triển cho tính toán máy tính kỹ thuật số so với phương pháp tiếp cận miền thời gian.
Hãy xem xét một chuỗi thời lượng hữu hạn, $[x(n) = 0,\quad for,n<0\quad and\quad n\geq L]$ (phương trình tổng quát), kích thích một bộ lọc tuyến tính với phản ứng xung $[h(n) = 0,\quad forn<0\quad and\quad n\geq M]$.
$$x(n)y(n)$$ $$output = y(n) = \sum_{k = 0}^{M-1}h(k).x(n-k)$$Từ phân tích tích chập, rõ ràng rằng, khoảng thời gian của y (n) là L + M − 1.
Trong miền tần số,
$$Y(\omega) = X(\omega).H(\omega)$$Hiện nay, $Y(\omega)$ là một hàm liên tục của ω và nó được lấy mẫu ở một tập hợp các tần số rời rạc với số lượng mẫu riêng biệt phải bằng hoặc lớn hơn $L+M-1$.
$$DFT\quad size = N\geq L+M-1$$Với $\omega = \frac{2\pi}{N}k$,
$Y(\omega) = X(k).H(k)$, trong đó k = 0,1,…., n-1
Trong đó, X (k) và H (k) lần lượt là DFT điểm N của x (n) và h (n). $x(n)\& h(n)$ được đệm bằng các số không có độ dài lên đến N. Nó sẽ không làm biến dạng quang phổ liên tục $X(\omega)$ và $H(\omega)$. Từ$N\geq L+M-1$, DFT điểm N của chuỗi đầu ra y (n) đủ để biểu diễn y (n) trong miền tần số và các dữ kiện này suy ra rằng phép nhân DFT điểm N của X (k) và H (k), theo sau là phép tính của N-point IDFT phải mang lại y (n).
Điều này ngụ ý rằng, tích chập tròn điểm N của x (n) và H (n) không có phần đệm bằng không, bằng với tích chập tuyến tính của x (n) và h (n).
Do đó, DFT có thể được sử dụng để lọc tuyến tính.
Caution - N luôn phải lớn hơn hoặc bằng $L+M-1$. Nếu không, hiệu ứng răng cưa sẽ làm hỏng trình tự đầu ra.
Giả sử, chuỗi đầu vào x (n) có thời lượng dài được xử lý với một hệ thống có đáp ứng xung thời gian hữu hạn bằng cách xoay vòng hai chuỗi. Vì, quá trình lọc tuyến tính được thực hiện thông qua DFT liên quan đến hoạt động trên một khối dữ liệu có kích thước cố định, trình tự đầu vào được chia thành các khối dữ liệu có kích thước cố định khác nhau trước khi xử lý.
Các khối kế tiếp sau đó được xử lý từng khối một và kết quả được kết hợp để tạo ra kết quả ròng.
Vì phép tích chập được thực hiện bằng cách chia chuỗi đầu vào dài thành các phần có kích thước cố định khác nhau, nó được gọi là tích chập phân đoạn. Một chuỗi đầu vào dài được phân đoạn thành các khối có kích thước cố định, trước khi xử lý bộ lọc FIR.
Hai phương pháp được sử dụng để đánh giá tích chập rời rạc -
Overlap-save method
Overlap-add method
Phương pháp Lưu chồng chéo
Overlap-save là tên truyền thống để chỉ một cách hiệu quả để đánh giá tích chập rời rạc giữa tín hiệu rất dài x (n) và bộ lọc đáp ứng xung hữu hạn (FIR) h (n). Dưới đây là các bước của phương pháp lưu chồng chéo -
Cho độ dài của khối dữ liệu đầu vào = N = L + M-1. Do đó, độ dài DFT và IDFT = N. Mỗi khối dữ liệu mang M-1 điểm dữ liệu của khối trước đó tiếp theo là L điểm dữ liệu mới để tạo thành chuỗi dữ liệu có độ dài N = L + M-1.
Đầu tiên, DFT điểm N được tính cho mỗi khối dữ liệu.
Bằng cách thêm các số không (L-1), đáp ứng xung của bộ lọc FIR được tăng chiều dài và DFT điểm N được tính toán và lưu trữ.
Phép nhân hai DFT điểm N H (k) và X m (k): Y ′ m (k) = H (k) .X m (k), trong đó K = 0,1,2,… N-1
Khi đó, IDFT [Y ′ m ((k)] = y ′ ((n) = [y ′ m (0), y ′ m (1), y ′ m (2), ....... y ' m (M-1), y' m (M), ....... y ' m (N-1)]
(ở đây, N-1 = L + M-2)
Các điểm M-1 đầu tiên bị hỏng do răng cưa và do đó, chúng bị loại bỏ vì bản ghi dữ liệu có độ dài N.
Điểm L cuối cùng giống hệt như kết quả của phép tích chập, vì vậy
y ′ m (n) = y m (n) trong đó n = M, M + 1,… .N-1
Để tránh răng cưa, cuối cùng M-1 yếu tố của mỗi bản ghi dữ liệu được lưu và những điểm thực hiện chuyển tiếp vào hồ sơ tiếp theo và trở thành 1 st M-1 yếu tố.

Kết quả của IDFT, trong đó các Điểm M-1 đầu tiên được tránh, để vô hiệu hóa răng cưa và các điểm L còn lại tạo thành kết quả mong muốn như kết quả của một phép chập tuyến tính.
Phương pháp Thêm chồng chéo
Dưới đây là các bước để tìm ra tích chập rời rạc bằng phương pháp Chồng chéo:
Gọi kích thước khối dữ liệu đầu vào là L. Do đó, kích thước của DFT và IDFT: N = L + M-1
Mỗi khối dữ liệu được nối với M-1 số không vào cuối cùng.
Tính toán DFT điểm N.
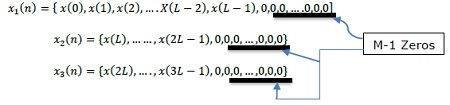
Hai DFT điểm N được nhân: Y m (k) = H (k) .X m (k), trong đó k = 0, 1,2,…., N-1
IDFT [Y m (k)] tạo ra các khối có độ dài N không bị ảnh hưởng bởi hiện tượng răng cưa vì kích thước của DFT là N = L + M-1 và độ dài của chuỗi tăng lên N-điểm bằng cách thêm các số không M-1 vào mỗi khối.
Điểm M-1 cuối cùng của mỗi khối phải được chồng lên nhau và được cộng vào điểm M-1 đầu tiên của khối tiếp theo.
(lý do: Mỗi khối dữ liệu kết thúc bằng M-1 số không)
Do đó, phương pháp này được gọi là phương pháp bổ sung chồng chéo. Do đó, chúng tôi nhận được -
y (n) = {y 1 (0), y 1 (1), y 1 (2),… .., y 1 (L-1), y 1 (L) + y 2 (0), y 1 (L + 1) + y 2 (1),…… .., y 1 (N-1) + y 2 (M-1), y 2 (M),… .. . ... ... ...}
DCT (Biến đổi Cosin rời rạc) là một dãy N đầu vào x (n), 0≤n≤N-1, như một phép biến đổi tuyến tính hoặc kết hợp của cấp số nhân phức tạp. Kết quả là, các hệ số DFT nói chung là phức tạp ngay cả khi x (n) là thực.
Giả sử, chúng ta cố gắng tìm ra một phép biến đổi trực giao có cấu trúc N × N biểu thị một dãy thực x (n) là một tổ hợp tuyến tính của dãy cosin. Chúng tôi đã biết rằng -
$X(K) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)cos\frac{2\Pi kn}{N}0\leq k \leq N-1$
Và $x(n) = \frac{1}{N}\sum_{k = 0}^{N-1}x(k)cos\frac{2\Pi kn}{N}0\leq k \leq N-1$
Điều này có thể thực hiện được nếu dãy điểm x (n) N là thực và chẵn. Vì vậy,$x(n) = x(N-n),0\leq n \leq (N-1)$. Bản thân DFT kết quả là thực và đều. Những điều này làm rõ ràng rằng chúng ta có thể thiết bị một phép biến đổi cosin rời rạc, cho bất kỳ chuỗi thực điểm N nào bằng cách lấy DFT điểm 2N của một "phần mở rộng chẵn" của chuỗi.
Về cơ bản, DCT được sử dụng trong xử lý hình ảnh và giọng nói. Nó cũng được sử dụng để nén hình ảnh và tín hiệu giọng nói.
$DFT[s(n)] = S(k) = \sum_{n = 0}^{2N-1}s(n)W_{2N}^{nk},\quad where\quad 0\leq k \leq 2N-1$
$S(k) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)W_{2N}^{nk}+\displaystyle\sum\limits_{n = N}^{2N-1}x(2N-n-1)W_{2N}^{nk};\quad where\quad 0\leq k\leq 2N-1$
$\Rightarrow S(k) = W_{2N}^{-k/2}+\sum_{n = 0}^{N-1}x(n) [W_{2N}^{nk}W_{2N}^{k/2}+W_{2N}^{-nk}W_{2N}^{-k/2}];\quad where\quad 0\leq k\leq 2N-1$
$\Rightarrow S(k) = W_{2N}^{\frac{k}{2}}\sum_{n = 0}^{N-1}x(n)\cos [\frac{\pi}{N}(n+\frac{1}{2})k];\quad where\quad 0\leq k\leq 2N-1$
DCT được định nghĩa bởi,
$V(k) = 2\sum_{n = 0}^{N-1}x(n)\cos [\frac{\pi}{2}(n+\frac{1}{2})k]\quad where\quad 0\leq k\leq N-1$
$\Rightarrow V(k) = W_{2N}^{\frac{k}{2}}S(k)\quad or\quad S(k) = W_{2N}^{\frac{k}{2}}V(k),\quad where\quad 0\leq k\leq N-1$
$\Rightarrow V(k) = 2R[W_{2N}^{\frac{k}{2}}\sum_{n = 0}^{N-1}x(n)W_{2N}^{nk}],\quad where\quad 0\leq k\leq N-1$
ví dụ 1
Kiểm chứng định lý Parseval của dãy $x(n) = \frac{1^n}{4}u(n)$
Solution - $\displaystyle\sum\limits_{-\infty}^\infty|x_1(n)|^2 = \frac{1}{2\pi}\int_{-\pi}^{\pi}|X_1(e^{j\omega})|^2d\omega$
LHS $\displaystyle\sum\limits_{-\infty}^\infty|x_1(n)|^2$
$= \displaystyle\sum\limits_{-\infty}^{\infty}x(n)x^*(n)$
$= \displaystyle\sum\limits_{-\infty}^\infty(\frac{1}{4})^{2n}u(n) = \frac{1}{1-\frac{1}{16}} = \frac{16}{15}$
RHS $X(e^{j\omega}) = \frac{1}{1-\frac{1}{4}e-j\omega} = \frac{1}{1-0.25\cos \omega+j0.25\sin \omega}$
$\Longleftrightarrow X^*(e^{j\omega}) = \frac{1}{1-0.25\cos \omega-j0.25\sin \omega}$
Tính toán, $X(e^{j\omega}).X^*(e^{j\omega})$
$= \frac{1}{(1-0.25\cos \omega)^2+(0.25\sin \omega)^2} = \frac{1}{1.0625-0.5\cos \omega}$
$\frac{1}{2\pi}\int_{-\pi}^{\pi}\frac{1}{1.0625-0.5\cos \omega}d\omega$
$\frac{1}{2\pi}\int_{-\pi}^{\pi}\frac{1}{1.0625-0.5\cos \omega}d\omega = 16/15$
Chúng ta có thể thấy rằng, LHS = RHS. (Do đó đã được chứng minh)
Ví dụ 2
Tính toán DFT điểm N của $x(n) = 3\delta (n)$
Solution - Chúng tôi biết điều đó,
$X(K) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)e^{\frac{j2\Pi kn}{N}}$
$= \displaystyle\sum\limits_{n = 0}^{N-1}3\delta(n)e^{\frac{j2\Pi kn}{N}}$
$ = 3\delta (0)\times e^0 = 1$
Vì thế,$x(k) = 3,0\leq k\leq N-1$… Ans.
Ví dụ 3
Tính toán DFT điểm N của $x(n) = 7(n-n_0)$
Solution - Chúng tôi biết điều đó,
$X(K) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)e^{\frac{j2\Pi kn}{N}}$
Thay giá trị của x (n),
$\displaystyle\sum\limits_{n = 0}^{N-1}7\delta (n-n_0)e^{-\frac{j2\Pi kn}{N}}$
$= e^{-kj14\Pi kn_0/N}$… Ans
Trong các phương pháp DFT trước đó, chúng ta đã thấy rằng phần tính toán quá dài. Chúng tôi muốn giảm điều đó. Điều này có thể được thực hiện thông qua FFT hoặc biến đổi Fourier nhanh. Vì vậy, chúng ta có thể nói FFT không là gì khác ngoài việc tính toán biến đổi Fourier rời rạc trong một định dạng thuật toán, trong đó phần tính toán sẽ được giảm bớt.
Ưu điểm chính của việc có FFT là thông qua nó, chúng ta có thể thiết kế các bộ lọc FIR. Về mặt toán học, FFT có thể được viết như sau;
$$x[K] = \displaystyle\sum\limits_{n = 0}^{N-1}x[n]W_N^{nk}$$Hãy để chúng tôi lấy một ví dụ để hiểu nó tốt hơn. Chúng tôi đã xem xét tám điểm được đặt tên từ$x_0\quad to\quad x_7$. Chúng tôi sẽ chọn các số hạng chẵn trong một nhóm và các số hạng lẻ trong nhóm kia. Chế độ xem sơ đồ của những điều nói trên đã được hiển thị bên dưới -
Ở đây, các điểm x 0 , x 2 , x 4 và x 6 đã được nhóm vào một loại và tương tự, các điểm x 1 , x 3 , x 5 và x 7 đã được đưa vào một loại khác. Bây giờ, chúng ta có thể tạo chúng thành một nhóm hai người và có thể tiến hành tính toán. Bây giờ, chúng ta hãy xem việc chia thành hai phần tiếp theo sẽ giúp ích như thế nào trong việc tính toán.
$x[k] = \displaystyle\sum\limits_{r = 0}^{\frac{N}{2}-1}x[2r]W_N^{2rk}+\displaystyle\sum\limits_{r = 0}^{\frac{N}{2}-1}x[2r+1]W_N^{(2r+1)k}$
$= \sum_{r = 0}^{\frac{N}{2}-1}x[2r]W_{N/2}^{rk}+\sum_{r = 0}^{\frac{N}{2}-1}x[2r+1]W_{N/2}^{rk}\times W_N^k$
$= G[k]+H[k]\times W_N^k$
Ban đầu, chúng tôi lấy một dãy tám điểm, nhưng sau đó chúng tôi chia dãy đó thành hai phần G [k] và H [k]. G [k] là phần chẵn trong khi H [k] là phần lẻ. Nếu chúng ta muốn nhận ra nó thông qua một sơ đồ, thì nó có thể được hiển thị như dưới đây:
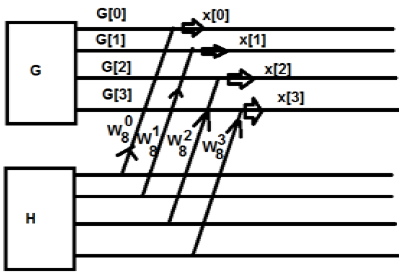
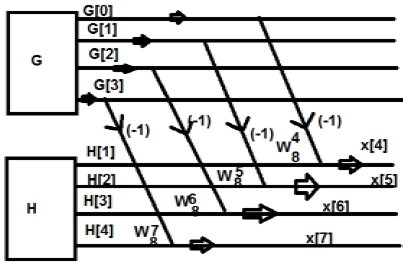
Từ hình trên, chúng ta có thể thấy rằng
$W_8^4 = -1$
$W_8^5 = -W_8^1$
$W_8^6 = -W_8^2$
$W_8^7 = -W_8^3$
Tương tự, các giá trị cuối cùng có thể được viết như sau:
$G[0]-H[0] = x[4]$
$G[1]-W_8^1H[1] = x[5]$
$G[2]-W_8^2H[2] = x[6]$
$G[1]-W_8^3H[3] = x[7]$
Trên đây là một chuỗi tuần hoàn. Nhược điểm của hệ thống này là K không thể bị phá vỡ quá 4 điểm. Bây giờ chúng ta hãy chia nhỏ những điều trên thành nhiều hơn nữa. Chúng ta sẽ nhận được những cấu trúc như thế này
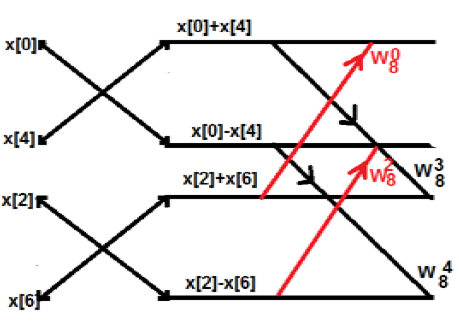
Thí dụ
Xét dãy x [n] = {2,1, -1, -3,0,1,2,1}. Tính FFT.
Solution - Dãy đã cho là x [n] = {2,1, -1, -3,0,1,2,1}
Sắp xếp các điều khoản như hình dưới đây;
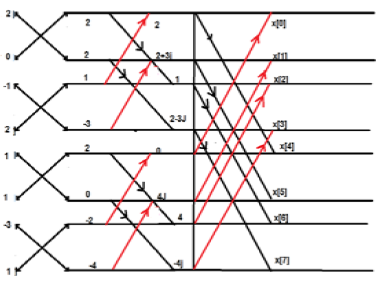
Việc sử dụng bộ nhớ hiệu quả này rất quan trọng đối với việc thiết kế phần cứng nhanh để tính toán FFT. Thuật ngữ tính toán tại chỗ được sử dụng để mô tả việc sử dụng bộ nhớ này.
Phân rã theo trình tự thời gian
Trong cấu trúc này, chúng tôi biểu diễn tất cả các điểm ở định dạng nhị phân, tức là ở 0 và 1. Sau đó, chúng tôi đảo ngược các cấu trúc đó. Chuỗi mà chúng ta nhận được sau đó được gọi là chuỗi đảo ngược bit. Đây còn được gọi là số thập phân theo chuỗi thời gian. Tính toán tại chỗ của DFT tám điểm được hiển thị ở định dạng bảng như hình dưới đây:
| ĐIỂM | ĐỊNH DẠNG BINARY | REVERSAL | ĐIỂM TƯƠNG ĐƯƠNG |
|---|---|---|---|
| 0 | 000 | 000 | 0 |
| 1 | 001 | 100 | 4 |
| 2 | 010 | 010 | 2 |
| 3 | 011 | 110 | 6 |
| 4 | 100 | 001 | 1 |
| 5 | 101 | 101 | 5 |
| 6 | 110 | 011 | 3 |
| 7 | 111 | 111 | 7 |
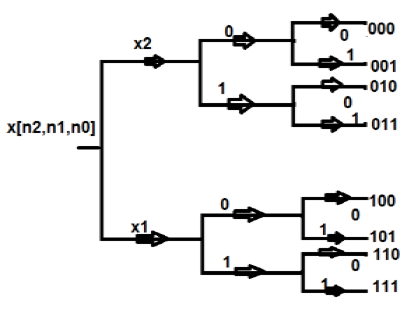
Phân rã theo chuỗi tần số
Ngoài chuỗi thời gian, chuỗi điểm N cũng có thể được biểu diễn theo tần số. Chúng ta hãy xem một chuỗi bốn điểm để hiểu rõ hơn.
Hãy để trình tự là $x[0], x[1], x[2], x[3], x[4], x[5], x[6], x[7]$. Ban đầu, chúng tôi sẽ nhóm hai điểm thành một nhóm. Về mặt toán học, chuỗi này có thể được viết là;
$$x[k] = \sum_{n = 0}^{N-1}x[n]W_N^{n-k}$$Bây giờ chúng ta hãy tạo một nhóm của dãy số 0 đến 3 và một nhóm khác của dãy số 4 đến 7. Bây giờ, về mặt toán học, điều này có thể được hiển thị như;
$$\displaystyle\sum\limits_{n = 0}^{\frac{N}{2}-1}x[n]W_N^{nk}+\displaystyle\sum\limits_{n = N/2}^{N-1}x[n]W_N^{nk}$$Chúng ta hãy thay n bởi r, trong đó r = 0, 1, 2…. (N / 2-1). Về mặt toán học,
$$\displaystyle\sum\limits_{n = 0}^{\frac{N}{2}-1}x[r]W_{N/2}^{nr}$$Ban đầu chúng tôi lấy bốn điểm đầu tiên (x [0], x [1], x [2], x [3]) và cố gắng biểu diễn chúng theo phương pháp toán học như sau:
$\sum_{n = 0}^3x[n]W_8^{nk}+\sum_{n = 0}^3x[n+4]W_8^{(n+4)k}$
$= \lbrace \sum_{n = 0}^3x[n]+\sum_{n = 0}^3x[n+4]W_8^{(4)k}\rbrace \times W_8^{nk}$
hiện nay $X[0] = \sum_{n = 0}^3(X[n]+X[n+4])$
$X[1] = \sum_{n = 0}^3(X[n]+X[n+4])W_8^{nk}$
$= [X[0]-X[4]+(X[1]-X[5])W_8^1+(X[2]-X[6])W_8^2+(X[3]-X[7])W_8^3$
Chúng ta có thể chia nó thành hai phần nữa, có nghĩa là thay vì chia chúng thành chuỗi 4 điểm, chúng ta có thể chia chúng thành chuỗi 2 điểm.
Bộ lọc FIR có thể hữu ích trong việc thiết kế bộ lọc có sự hỗ trợ của máy tính. Hãy để chúng tôi lấy một ví dụ và xem nó hoạt động như thế nào. Dưới đây là hình của bộ lọc mong muốn.

Trong khi thiết kế máy tính, chúng tôi chia toàn bộ số liệu đồ thị liên tục thành các giá trị rời rạc. Trong một số giới hạn nhất định, chúng tôi chia nó thành 64, 256 hoặc 512 (v.v.) số phần có độ lớn rời rạc.
Trong ví dụ trên, chúng ta đã lấy giới hạn từ -π đến + π. Chúng tôi đã chia nó thành 256 phần. Các điểm có thể được biểu diễn dưới dạng H (0), H (1),…. Lên đến H (256). Ở đây, chúng tôi áp dụng thuật toán IDFT và điều này sẽ cung cấp cho chúng tôi các đặc tính pha tuyến tính.
Đôi khi, chúng tôi có thể quan tâm đến một số thứ tự cụ thể của bộ lọc. Giả sử chúng tôi muốn hiện thực hóa thiết kế đã cho ở trên thông qua bộ lọc thứ 9 . Vì vậy, chúng tôi nhận các giá trị bộ lọc là h0, h1, h2… .h9. Về mặt toán học, nó có thể được hiển thị như dưới đây
$$H(e^{j\omega}) = h_0+h_1e^{-j\omega}+h_2e^{-2j\omega}+.....+h_9e^{-9j\omega}$$Trường hợp có số lượng lớn trật khớp, chúng tôi lấy điểm tối đa.
Ví dụ, trong hình trên, có một sự sụt giảm đột ngột giữa các điểm B và C. Vì vậy, chúng tôi cố gắng lấy các giá trị rời rạc hơn tại điểm này, nhưng có độ dốc không đổi giữa điểm C và D. số lượng giá trị rời rạc ít hơn.
Để thiết kế bộ lọc trên, chúng tôi thực hiện quá trình giảm thiểu như sau;
$H(e^{j\omega1}) = h_0+h_1e^{-j\omega1}+h_2e^{-2j\omega1}+.....+h_9e^{-9j\omega1}$
$H(e^{j\omega2}) = h_0+h_1e^{-j\omega2}+h_2e^{-2j\omega2}+.....+h_9e^{-9j\omega2}$
Tương tự,
$(e^{j\omega1000}) = h_0+h_1eH^{-j\omega1000}h_2e^{-2j\omega1000}+.....+h_9+e^{-9j\omega1000}$
Biểu diễn phương trình trên dưới dạng ma trận, ta có:
$$\begin{bmatrix}H(e^{j\omega_1})\\.\\.\\H(e^{j\omega_{1000}}) \end{bmatrix} = \begin{bmatrix}e^{-j\omega_1} & ... & e^{-j9\omega_1} \\. & & . \\. & & . \\e^{-j\omega_{1000}} &... & e^{j9\omega_{1000}} \end{bmatrix}\begin{bmatrix}h_0\\.\\.\\h_9\end{bmatrix}$$Chúng ta hãy lấy ma trận 1000 × 1 là B, ma trận 1000 × 9 là A và ma trận 9 × 1 là $\hat{h}$.
Vì vậy, để giải ma trận trên, chúng ta sẽ viết
$\hat{h} = [A^TA]^{-1}A^{T}B$
$= [A^{*T}A]^{-1}A^{*T}B$
trong đó A * biểu diễn liên hợp phức của ma trận A.