Digitale Signalverarbeitung - Kurzanleitung
Definition
Alles, was Informationen enthält, kann als Signal bezeichnet werden. Es kann auch als physikalische Größe definiert werden, die mit Zeit, Temperatur, Druck oder mit unabhängigen Variablen wie Sprachsignal oder Videosignal variiert.
Der Betriebsprozess, bei dem sich die Eigenschaften eines Signals (Amplitude, Form, Phase, Frequenz usw.) ändern, wird als Signalverarbeitung bezeichnet.
Note- Jedes unerwünschte Signal, das das Hauptsignal stört, wird als Rauschen bezeichnet. Rauschen ist also auch ein Signal, aber unerwünscht.
Entsprechend ihrer Darstellung und Verarbeitung können Signale in verschiedene Kategorien eingeteilt werden, deren Einzelheiten nachstehend erörtert werden.
Kontinuierliche Zeitsignale
Zeitkontinuierliche Signale werden entlang eines Zeitkontinuums definiert und somit durch eine kontinuierliche unabhängige Variable dargestellt. Kontinuierliche Signale werden oft als analoge Signale bezeichnet.
Diese Art von Signal zeigt Kontinuität sowohl in der Amplitude als auch in der Zeit. Diese haben zu jedem Zeitpunkt Werte. Sinus- und Cosinusfunktionen sind das beste Beispiel für ein kontinuierliches Zeitsignal.
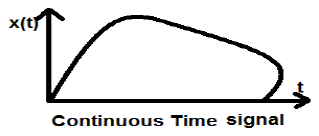
Das oben gezeigte Signal ist ein Beispiel für ein kontinuierliches Zeitsignal, da wir zu jedem Zeitpunkt einen Signalwert erhalten können.
Diskrete Zeitsignale
Die zu diskreten Zeiten definierten Signale werden als diskrete Signale bezeichnet. Daher hat jede unabhängige Variable einen eigenen Wert. Sie werden also als Zahlenfolge dargestellt.
Obwohl Sprach- und Videosignale das Privileg haben, sowohl im kontinuierlichen als auch im diskreten Zeitformat dargestellt zu werden; unter bestimmten Umständen sind sie identisch. Amplituden zeigen auch diskrete Eigenschaften. Ein perfektes Beispiel dafür ist ein digitales Signal. deren Amplitude und Zeit beide diskret sind.
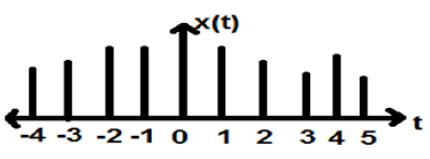
Die obige Abbildung zeigt die diskrete Amplitudencharakteristik eines diskreten Signals über einen bestimmten Zeitraum. Mathematisch können diese Arten von Signalen wie folgt formuliert werden:
$$x = \left \{ x\left [ n \right ] \right \},\quad -\infty < n< \infty$$Wobei n eine ganze Zahl ist.
Es ist eine Folge von Zahlen x, wobei die n- te Zahl in der Folge als x [n] dargestellt wird.
Zum Testen eines Systems werden im Allgemeinen Standard- oder Basissignale verwendet. Diese Signale sind die Grundbausteine für viele komplexe Signale. Daher spielen sie eine sehr wichtige Rolle bei der Untersuchung von Signalen und Systemen.
Einheitsimpuls oder Delta-Funktion
Ein Signal, das die Bedingung erfüllt, $\delta(t) = \lim_{\epsilon \to \infty} x(t)$ist als Einheitsimpulssignal bekannt. Dieses Signal tendiert gegen unendlich, wenn t = 0 ist, und gegen Null, wenn t ≤ 0 ist, so dass die Fläche unter seiner Kurve immer gleich eins ist. Die Delta-Funktion hat überall bei t = 0 die Amplitude Null excunit_impulse.jpgept.

Eigenschaften des Einheitsimpulssignals
- δ (t) ist ein gerades Signal.
- δ (t) ist ein Beispiel für weder ein Energie- noch ein Leistungssignal (NENP).
- Der Bereich des Einheitsimpulssignals kann wie folgt geschrieben werden: $$A = \int_{-\infty}^{\infty} \delta (t)dt = \int_{-\infty}^{\infty} \lim_{\epsilon \to 0} x(t) dt = \lim_{\epsilon \to 0} \int_{-\infty}^{\infty} [x(t)dt] = 1$$
- Gewicht oder Stärke des Signals können geschrieben werden als; $$y(t) = A\delta (t)$$
- Der Bereich des gewichteten Impulssignals kann geschrieben werden als - $$y (t) = \int_{-\infty}^{\infty} y (t)dt = \int_{-\infty}^{\infty} A\delta (t) = A[\int_{-\infty}^{\infty} \delta (t)dt ] = A = 1 = Wigthedimpulse$$
Einheitsschritt-Signal
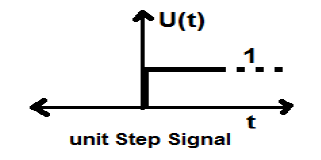
Ein Signal, das die folgenden zwei Bedingungen erfüllt:
- $U(t) = 1(when\quad t \geq 0 )and$
- $U(t) = 0 (when\quad t < 0 )$
ist als Einheitsschritt-Signal bekannt.
Es hat die Eigenschaft, eine Diskontinuität bei t = 0 anzuzeigen. Am Punkt der Diskontinuität ist der Signalwert durch den Durchschnitt des Signalwerts gegeben. Dieses Signal wurde kurz vor und nach dem Punkt der Diskontinuität aufgenommen (gemäß Gibbs Phänomenen).
Wenn wir einem anderen zeitskalierten Stufensignal ein Schrittsignal hinzufügen, ist das Ergebnis Eins. Es ist ein Leistungssignal und der Leistungswert beträgt 0,5. Der Effektivwert (Root Mean Square) beträgt 0,707 und sein Durchschnittswert beträgt ebenfalls 0,5
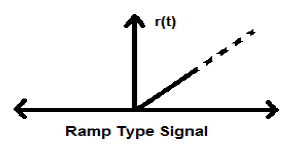
Rampensignal
Die Integration des Schrittsignals führt zu einem Rampensignal. Es wird durch r (t) dargestellt. Das Rampensignal erfüllt auch die Bedingung$r(t) = \int_{-\infty}^{t} U(t)dt = tU(t)$. Es handelt sich weder um ein Signal vom Typ Energie noch Leistung (NENP).
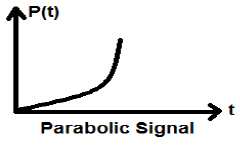
Parabolisches Signal
Die Integration des Rampensignals führt zu einem parabolischen Signal. Es wird durch p (t) dargestellt. Das parabolische Signal erfüllt auch die Bedingung$p(t) = \int_{-\infty}^{t} r(t)dt = (t^{2}/2)U(t)$. Es handelt sich weder um ein Signal vom Typ Energie noch Leistung (NENP).
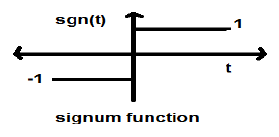
Signum-Funktion
Diese Funktion wird dargestellt als
$$sgn(t) = \begin{cases}1 & for\quad t >0\\-1 & for\quad t<0\end{cases}$$Es ist ein Leistungssignal. Der Leistungswert und der Effektivwert (Root Mean Square) sind beide 1. Der Durchschnittswert der Signumfunktion ist Null.
Sinc Funktion
Es ist auch eine Funktion des Sinus und wird geschrieben als -
$$SinC(t) = \frac{Sin\Pi t}{\Pi T} = Sa(\Pi t)$$Eigenschaften der Sinc-Funktion
Es ist ein Energiesignal.
$Sinc(0) = \lim_{t \to 0}\frac{\sin \Pi t}{\Pi t} = 1$
$Sinc(\infty) = \lim_{t \to \infty}\frac{\sin \Pi \infty}{\Pi \infty} = 0$ (Der Bereich von sinπ∞ variiert zwischen -1 und +1, aber alles, was durch unendlich geteilt wird, ist gleich Null.)
-
Wenn $ \sin c(t) = 0 => \sin \Pi t = 0$
$\Rightarrow \Pi t = n\Pi$
$\Rightarrow t = n (n \neq 0)$
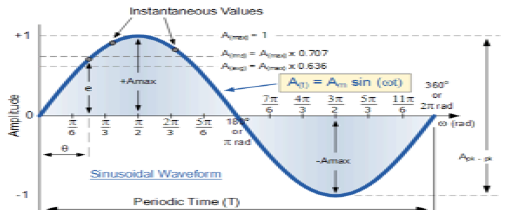
Sinussignal
Ein Signal, das von Natur aus kontinuierlich ist, wird als kontinuierliches Signal bezeichnet. Allgemeines Format eines sinusförmigen Signals ist
$$x(t) = A\sin (\omega t + \phi )$$Hier,
A = Amplitude des Signals
ω = Winkelfrequenz des Signals (gemessen im Bogenmaß)
φ = Phasenwinkel des Signals (gemessen im Bogenmaß)
Die Tendenz dieses Signals besteht darin, sich nach einer bestimmten Zeitspanne zu wiederholen, was als periodisches Signal bezeichnet wird. Die Zeitdauer des Signals ist gegeben als;
$$T = \frac{2\pi }{\omega }$$Die schematische Ansicht des sinusförmigen Signals ist unten gezeigt.
Rechteckige Funktion
Ein Signal wird als rechteckiger Funktionstyp bezeichnet, wenn es die folgende Bedingung erfüllt:
$$\pi(\frac{t}{\tau}) = \begin{cases}1, & for\quad t\leq \frac{\tau}{2}\\0, & Otherwise\end{cases}$$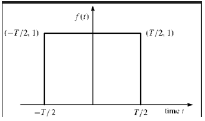
Da dieses Signal symmetrisch zur Y-Achse ist, wird es als gerades Signal bezeichnet.
Dreieckiges Impulssignal
Jedes Signal, das die folgende Bedingung erfüllt, wird als Dreieckssignal bezeichnet.
$$\Delta(\frac{t}{\tau}) = \begin{cases}1-(\frac{2|t|}{\tau}) & for|t|<\frac{\tau}{2}\\0 & for|t|>\frac{\tau}{2}\end{cases}$$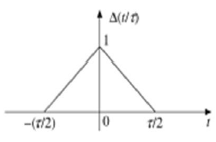
Dieses Signal ist symmetrisch zur Y-Achse. Daher wird es auch als gerades Signal bezeichnet.
Wir haben gesehen, wie die Grundsignale im kontinuierlichen Zeitbereich dargestellt werden können. Lassen Sie uns sehen, wie die Grundsignale im diskreten Zeitbereich dargestellt werden können.
Einheitsimpulssequenz
Es wird im diskreten Zeitbereich als δ (n) bezeichnet und kann definiert werden als;
$$\delta(n)=\begin{cases}1, & for \quad n=0\\0, & Otherwise\end{cases}$$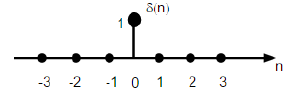
Einheitsschritt-Signal
Das diskrete Zeiteinheitsschrittsignal ist definiert als;
$$U(n)=\begin{cases}1, & for \quad n\geq0\\0, & for \quad n<0\end{cases}$$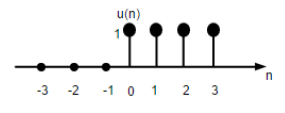
Die obige Abbildung zeigt die grafische Darstellung einer diskreten Schrittfunktion.
Rampenfunktion der Einheit
Eine diskrete Einheitsrampenfunktion kann definiert werden als -
$$r(n)=\begin{cases}n, & for \quad n\geq0\\0, & for \quad n<0\end{cases}$$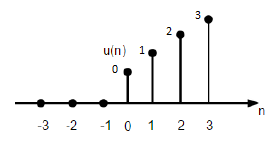
Die obige Abbildung zeigt die grafische Darstellung eines diskreten Rampensignals.
Parabelfunktion
Die Parabelfunktion der diskreten Einheit wird als p (n) bezeichnet und kann definiert werden als;
$$p(n) = \begin{cases}\frac{n^{2}}{2} ,& for \quad n\geq0\\0, & for \quad n<0\end{cases}$$In Bezug auf die Einheitsschrittfunktion kann geschrieben werden als;
$$P(n) = \frac{n^{2}}{2}U(n)$$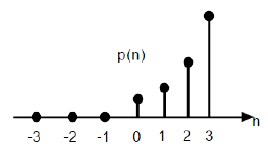
Die obige Abbildung zeigt die grafische Darstellung einer parabolischen Sequenz.
Sinussignal
Alle zeitkontinuierlichen Signale sind periodisch. Die zeitdiskreten sinusförmigen Sequenzen können periodisch sein oder nicht. Sie hängen vom Wert von ω ab. Damit ein diskretes Zeitsignal periodisch ist, muss die Winkelfrequenz ω ein rationales Vielfaches von 2π sein.
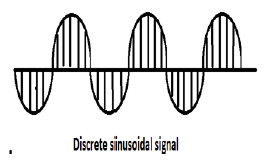
Ein diskretes sinusförmiges Signal ist in der obigen Abbildung dargestellt.
Die diskrete Form eines sinusförmigen Signals kann im Format dargestellt werden -
$$x(n) = A\sin(\omega n + \phi)$$Hier haben A, ω und φ ihre übliche Bedeutung und n ist die ganze Zahl. Die Zeitdauer des diskreten sinusförmigen Signals ist gegeben durch -
$$N =\frac{2\pi m}{\omega}$$Wobei N und m ganze Zahlen sind.
Kontinuierliche Zeitsignale können nach verschiedenen Bedingungen oder Operationen klassifiziert werden, die an den Signalen ausgeführt werden.
Gerade und ungerade Signale
Gleichmäßiges Signal
Ein Signal soll auch dann sein, wenn es die folgende Bedingung erfüllt;
$$x(-t) = x(t)$$Die zeitliche Umkehrung des Signals bedeutet hier keine Änderung der Amplitude. Betrachten Sie zum Beispiel die unten gezeigte Dreieckswelle.
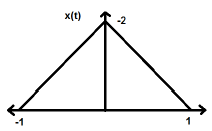
Das Dreieckssignal ist ein gerades Signal. Da es um die Y-Achse symmetrisch ist. Wir können sagen, es ist ein Spiegelbild um die Y-Achse.
Betrachten Sie ein anderes Signal wie in der folgenden Abbildung gezeigt.
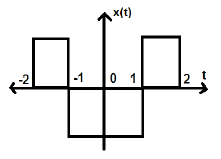
Wir können sehen, dass das obige Signal gerade ist, da es symmetrisch zur Y-Achse ist.
Ungerades Signal
Ein Signal wird als ungerade bezeichnet, wenn es die folgende Bedingung erfüllt
$$x(-t) = -x(t)$$Hier findet sowohl die Zeitumkehr als auch die Amplitudenänderung gleichzeitig statt.
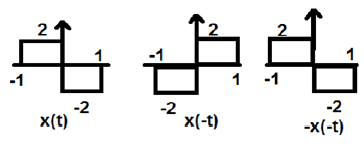
In der obigen Abbildung sehen wir ein Schrittsignal x (t). Um zu testen, ob es sich um ein ungerades Signal handelt oder nicht, führen wir zuerst die Zeitumkehrung durch, dh x (-t), und das Ergebnis ist wie in der Abbildung gezeigt. Dann kehren wir die Amplitude des resultierenden Signals um, dh –x (-t), und wir erhalten das Ergebnis wie in der Abbildung gezeigt.
Wenn wir die erste und die dritte Wellenform vergleichen, können wir sehen, dass sie gleich sind, dh x (t) = -x (-t), was unsere Kriterien erfüllt. Daher ist das obige Signal ein ungerades Signal.
Einige wichtige Ergebnisse in Bezug auf gerade und ungerade Signale sind unten angegeben.
- Gerade × Gerade = Gerade
- Ungerade × Ungerade = Gerade
- Gerade × ungerade = ungerade
- Gerade ± Gerade = Gerade
- Ungerade ± Ungerade = Ungerade
- Gerade ± ungerade = weder gerade noch ungerade
Darstellung eines Signals in gerader oder ungerader Form
Einige Signale können nicht direkt in gerade oder ungerade Typen eingeteilt werden. Diese werden als Kombination von geraden und ungeraden Signalen dargestellt.
$$x(t)\rightarrow x_{e}(t)+x_{0}(t)$$Wobei x e (t) das gerade Signal darstellt und x o (t) das ungerade Signal darstellt
$$x_{e}(t)=\frac{[x(t)+x(-t)]}{2}$$Und
$$x_{0}(t)=\frac{[x(t)-x(-t)]}{2}$$Beispiel
Finden Sie die geraden und ungeraden Teile des Signals $x(n) = t+t^{2}+t^{3}$
Solution - Durch Umkehren von x (n) erhalten wir
$$x(-n) = -t+t^{2}-t^{3}$$
Nun, nach Formel, der gerade Teil
$$x_{e}(t) = \frac{x(t)+x(-t)}{2}$$
$$= \frac{[(t+t^{2}+t^{3})+(-t+t^{2}-t^{3})]}{2}$$
$$= t^{2}$$
In ähnlicher Weise ist gemäß der Formel der ungerade Teil
$$x_{0}(t)=\frac{[x(t)-x(-t)]}{2}$$
$$= \frac{[(t+t^{2}+t^{3})-(-t+t^{2}-t^{3})]}{2}$$
$$= t+t^{3}$$
Periodische und nichtperiodische Signale
Periodische Signale
Das periodische Signal wiederholt sich nach einem bestimmten Zeitintervall. Wir können dies in Gleichungsform zeigen als -
$$x(t) = x(t)\pm nT$$Wobei n = eine ganze Zahl (1,2,3 ……)
T = Grundzeitraum (FTP) ≠ 0 und ≠ ≠
Die fundamentale Zeitspanne (FTP) ist der kleinste positive und feste Zeitwert, für den das Signal periodisch ist.
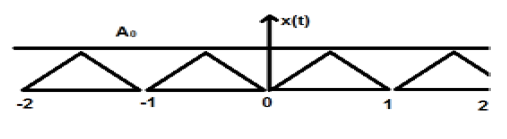
In der obigen Abbildung der Amplitude A ist ein dreieckiges Signal dargestellt. Hier wiederholt sich das Signal alle 1 Sekunde. Daher können wir sagen, dass das Signal periodisch ist und sein FTP 1 Sek. Beträgt.
Nichtperiodisches Signal
Wir können einfach sagen, dass die Signale, die nicht periodisch sind, nicht periodischer Natur sind. Es ist offensichtlich, dass sich diese Signale nach keiner Intervallzeit wiederholen.
Nichtperiodische Signale folgen keinem bestimmten Format. daher kann keine bestimmte mathematische Gleichung sie beschreiben.
Energie- und Energiesignale
Ein Signal wird genau dann als Energiesignal bezeichnet, wenn die enthaltene Gesamtenergie endlich und ungleich Null ist (0 <E <∞). Daher ist für jedes Energietypsignal das gesamte normalisierte Signal endlich und ungleich Null.
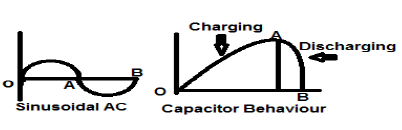
Ein sinusförmiges Wechselstromsignal ist ein perfektes Beispiel für ein Signal vom Energietyp, da es sich in einem Fall in einer positiven Halbwelle befindet und in der nächsten Halbwelle dann negativ ist. Daher wird seine durchschnittliche Leistung Null.
Ein verlustfreier Kondensator ist auch ein perfektes Beispiel für ein Signal vom Energietyp, da es, wenn es an eine Quelle angeschlossen ist, bis zu seinem optimalen Pegel aufgeladen wird und wenn die Quelle entfernt wird, diese gleiche Energiemenge durch eine Last abführt und ihre durchschnittliche Leistung an Null.
Für jedes endliche Signal x (t) kann die Energie als E symbolisiert werden und wird geschrieben als;
$$E = \int_{-\infty}^{+\infty} x^{2}(t)dt$$Die spektrale Dichte von Signalen vom Energietyp gibt die Energiemenge an, die auf verschiedenen Frequenzniveaus verteilt ist.
Leistungssignale
Ein Signal wird genau dann als Leistungssignal bezeichnet, wenn die normalisierte Durchschnittsleistung endlich und ungleich Null ist, dh (0 <p <∞). Für ein Signal vom Leistungstyp ist die normalisierte Durchschnittsleistung endlich und ungleich Null. Fast alle periodischen Signale sind Leistungssignale und ihre durchschnittliche Leistung ist endlich und ungleich Null.
In mathematischer Form kann die Potenz eines Signals x (t) wie folgt geschrieben werden:
$$P = \lim_{T \rightarrow \infty}1/T\int_{-T/2}^{+T/2} x^{2}(t)dt$$Unterschied zwischen Energie- und Leistungssignalen
Die folgende Tabelle fasst die Unterschiede zwischen Energie- und Leistungssignalen zusammen.
| Netzsignal | Energiesignal |
|---|---|
| Praktische periodische Signale sind Leistungssignale. | Nichtperiodische Signale sind Energiesignale. |
| Hier ist die normalisierte Durchschnittsleistung endlich und ungleich Null. | Hier ist die gesamte normalisierte Energie endlich und ungleich Null. |
| Mathematisch, $$P = \lim_{T \rightarrow \infty}1/T\int_{-T/2}^{+T/2} x^{2}(t)dt$$ |
Mathematisch, $$E = \int_{-\infty}^{+\infty} x^{2}(t)dt$$ |
| Das Vorhandensein dieser Signale ist im Laufe der Zeit unendlich. | Diese Signale existieren für einen begrenzten Zeitraum. |
| Die Energie des Leistungssignals ist über die unendliche Zeit unendlich. | Die Leistung des Energiesignals ist über unendliche Zeit Null. |
Gelöste Beispiele
Example 1 - Finden Sie die Leistung eines Signals $z(t) = 2\cos(3\Pi t+30^{o})+4\sin(3\Pi +30^{o})$
Solution- Die beiden obigen Signale sind orthogonal zueinander, da ihre Frequenzterme identisch sind und sie auch die gleiche Phasendifferenz aufweisen. Gesamtkraft ist also die Summe der einzelnen Kräfte.
Lassen $z(t) = x(t)+y(t)$
Wo $x(t) = 2\cos (3\Pi t+30^{o})$ und $y(t) = 4\sin(3\Pi +30^{o})$
Kraft von $x(t) = \frac{2^{2}}{2} = 2$
Kraft von $y(t) = \frac{4^{2}}{2} = 8$
Deshalb, $P(z) = p(x)+p(y) = 2+8 = 10$… Ans.
Example 2 - Prüfen Sie, ob das Signal gegeben ist $x(t) = t^{2}+j\sin t$ ist konjugiert oder nicht?
Solution- Hier ist der Realteil t 2 ein gerader und ein ungerader Teil (imaginär)$\sin t$ist ungerade. Das obige Signal ist also ein konjugiertes Signal.
Example 3 - Überprüfen Sie, ob $X(t)= \sin \omega t$ ist ein ungerades oder ein gerades Signal.
Solution - Gegeben $X(t) = \sin \omega t$
Durch die Zeitumkehr werden wir bekommen $\sin (-\omega t)$
Aber das wissen wir $\sin(-\phi) = -\sin \phi$.
Deshalb,
$$\sin (-\omega t) = -\sin \omega t$$Dies erfüllt die Bedingung, dass ein Signal ungerade ist. Deshalb,$\sin \omega t$ ist ein ungerades Signal.
Genau wie kontinuierliche Zeitsignale können diskrete Zeitsignale gemäß den Bedingungen oder Operationen an den Signalen klassifiziert werden.
Gerade und ungerade Signale
Gleichmäßiges Signal
Ein Signal wird als gerade oder symmetrisch bezeichnet, wenn es die folgende Bedingung erfüllt:
$$x(-n) = x(n)$$
Hier können wir sehen, dass x (-1) = x (1), x (-2) = x (2) und x (-n) = x (n). Somit ist es ein gleichmäßiges Signal.
Ungerades Signal
Ein Signal wird als ungerade bezeichnet, wenn es die folgende Bedingung erfüllt:
$$x(-n) = -x(n)$$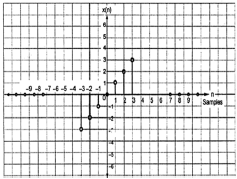
Aus der Figur können wir sehen, dass x (1) = -x (-1), x (2) = -x (2) und x (n) = -x (-n). Daher ist es sowohl ein ungerades als auch ein antisymmetrisches Signal.
Periodische und nichtperiodische Signale
Ein diskretes Zeitsignal ist genau dann periodisch, wenn es die folgende Bedingung erfüllt:
$$x(n+N) = x(n)$$Hier wiederholt sich das x (n) -Signal nach der N-Periode. Dies kann am besten unter Berücksichtigung eines Kosinussignals verstanden werden -
$$x(n) = A \cos(2\pi f_{0}n+\theta)$$ $$x(n+N) = A\cos(2\pi f_{0}(n+N)+\theta) = A\cos(2\pi f_{0}n+2\pi f_{0}N+\theta)$$ $$= A\cos(2\pi f_{0}n+2\pi f_{0}N+\theta)$$Damit das Signal periodisch wird, sollte die folgende Bedingung erfüllt sein:
$$x(n+N) = x(n)$$ $$\Rightarrow A\cos(2\pi f_{0}n+2\pi f_{0}N+\theta) = A \cos(2\pi f_{0}n+\theta)$$dh $2\pi f_{0}N$ ist ein ganzzahliges Vielfaches von $2\pi$
$$2\pi f_{0}N = 2\pi K$$ $$\Rightarrow N = \frac{K}{f_{0}}$$Die Frequenzen diskreter sinusförmiger Signale werden durch ein ganzzahliges Vielfaches von getrennt $2\pi$.
Energie- und Energiesignale
Energiesignal
Die Energie eines diskreten Zeitsignals wird als E bezeichnet. Mathematisch kann sie geschrieben werden als;
$$E = \displaystyle \sum\limits_{n=-\infty}^{+\infty}|x(n)|^2$$Wenn jeder einzelne Wert von $x(n)$werden quadriert und addiert, erhalten wir das Energiesignal. Hier$x(n)$ ist das Energiesignal und seine Energie ist über die Zeit endlich, dh $ 0 <E <\ infty $
Netzsignal
Die durchschnittliche Leistung eines diskreten Signals wird als P dargestellt. Mathematisch kann dies geschrieben werden als;
$$P = \lim_{N \to \infty} \frac{1}{2N+1}\displaystyle\sum\limits_{n=-N}^{+N} |x(n)|^2$$Hier ist die Leistung endlich, dh 0 <P <∞. Es gibt jedoch einige Signale, die weder zu einem Energie- noch zu einem Leistungssignal gehören.
Es gibt andere Signale, die das Ergebnis einer an ihnen ausgeführten Operation sind. Einige gebräuchliche Arten von Signalen werden unten diskutiert.
Signale konjugieren
Signale, die die Bedingung erfüllen $x(t) = x*(-t)$ werden konjugierte Signale genannt.
Lassen $x(t) = a(t)+jb(t)$... Gl. 1
Damit, $x(-t) = a(-t)+jb(-t)$
Und $x*(-t) = a(-t)-jb(-t)$... Gl. 2
Nach Zustand, $x(t) = x*(-t)$
Wenn wir beide abgeleiteten Gleichungen 1 und 2 vergleichen, können wir sehen, dass der Realteil gerade ist, während der Imaginärteil ungerade ist. Dies ist die Bedingung dafür, dass ein Signal ein konjugierter Typ ist.
Antisymmetrische Signale konjugieren
Signale, die die Bedingung erfüllen $x(t) = -x*(-t)$ werden als konjugiertes antisymmetrisches Signal bezeichnet
Lassen $x(t) = a(t)+jb(t)$... Gl. 1
Damit $x(-t) = a(-t)+jb(-t)$
Und $x*(-t) = a(-t)-jb(-t)$
$-x*(-t) = -a(-t)+jb(-t)$... Gl. 2
Nach Zustand $x(t) = -x*(-t)$
Vergleichen Sie nun noch einmal beide Gleichungen, genau wie wir es für konjugierte Signale getan haben. Hier werden wir feststellen, dass der Realteil ungerade und der Imaginärteil gerade ist. Dies ist die Bedingung dafür, dass ein Signal vom konjugierten antisymmetrischen Typ wird.
Beispiel
Das gegebene Signal sei $x(t) = \sin t+jt^{2}$.
Hier ist der eigentliche Teil $\sin t$ ist seltsam und der Imaginärteil ist $t^2$ist gerade. Dieses Signal kann also als konjugiertes antisymmetrisches Signal klassifiziert werden.
Jede Funktion kann in zwei Teile unterteilt werden. Ein Teil ist konjugierte Symmetrie und der andere Teil ist konjugiert antisymmetrisch. So kann jedes Signal x (t) geschrieben werden als
$$x(t) = xcs(t)+xcas(t)$$Wo $xcs(t)$ ist konjugiertes symmetrisches Signal und $xcas(t)$ ist ein konjugiertes antisymmetrisches Signal
$$xcs(t) = \frac{[x(t)+x*(-t)]}{2}$$Und
$$xcas(t) = \frac{[x(t)-x*(-t)]}{2}$$Symmetrische Halbwellensignale
Wenn ein Signal die Bedingung erfüllt $cx(t) = -x(t\pm (\frac{T_{0}}{2}))$wird es als halbwellensymmetrisches Signal bezeichnet. Hier erfolgt die Amplitudenumkehr und Zeitverschiebung des Signals zur Halbzeit. Für ein symmetrisches Halbwellensignal ist der Durchschnittswert Null, dies ist jedoch nicht der Fall, wenn sich die Situation umkehrt.
Betrachten Sie ein Signal x (t) wie in Abbildung A oben gezeigt. Der erste Schritt besteht darin, das Signal zeitlich zu verschieben und zu erzeugen$x[t-(\frac{T}{2})]$. Das neue Signal wird also wie in Abbildung B gezeigt geändert. Als nächstes kehren wir die Amplitude des Signals um, dh machen es$-x[t-(\frac{T}{2})]$ wie in Abbildung C gezeigt. Da sich dieses Signal nach einer Verschiebung der Halbzeit und einer Umkehrung der Amplitude wiederholt, handelt es sich um ein symmetrisches Halbwellensignal.
Orthogonales Signal
Zwei Signale x (t) und y (t) werden als orthogonal bezeichnet, wenn sie die folgenden zwei Bedingungen erfüllen.
Condition 1 - - $\int_{-\infty}^{\infty}x(t)y(t) = 0$ [für nichtperiodisches Signal]
Condition 2 - - $\int x(t)y(t) = 0$ [Für periodisches Signal]
Die Signale, die ungerade Harmonische (3 enthalten rd , 5 th , 7 th ... usw.) , Und unterschiedliche Frequenzen aufweisen, sind gegenseitig orthogonal zueinander sind.
In trigonometrischen Signalen sind Sinusfunktionen und Cosinusfunktionen auch orthogonal zueinander; vorausgesetzt, sie haben die gleiche Frequenz und sind in der gleichen Phase. In gleicher Weise sind auch Gleichstrom- (Gleichstromsignale) und Sinussignale orthogonal zueinander. Wenn x (t) und y (t) zwei orthogonale Signale sind und$z(t) = x(t)+y(t)$ dann kann die Kraft und Energie von z (t) geschrieben werden als;
$$P(z) = p(x)+p(y)$$ $$E(z) = E(x)+E(y)$$Beispiel
Analysieren Sie das Signal: $z(t) = 3+4\sin(2\pi t+30^0)$
Hier besteht das Signal aus einem Gleichstromsignal (3) und einer Sinusfunktion. Dieses Signal ist also von Natur aus ein orthogonales Signal, und die beiden darin enthaltenen Untersignale sind zueinander orthogonal zueinander.
Verschiebung bedeutet Bewegung des Signals entweder im Zeitbereich (um die Y-Achse) oder im Amplitudenbereich (um die X-Achse). Dementsprechend können wir die Verschiebung in zwei Kategorien einteilen, die als Zeitverschiebung und Amplitudenverschiebung bezeichnet werden. Diese werden nachfolgend erläutert.
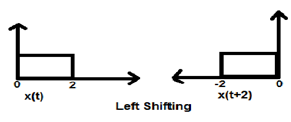
Zeitverschiebung
Zeitverschiebung bedeutet Verschiebung von Signalen im Zeitbereich. Mathematisch kann es geschrieben werden als
$$x(t) \rightarrow y(t+k)$$Dieser K-Wert kann positiv oder negativ sein. Entsprechend dem Vorzeichen des k-Werts gibt es zwei Arten von Verschiebungen, die als Rechtsverschiebung und Linksverschiebung bezeichnet werden.
Fall 1 (K> 0)
Wenn K größer als Null ist, erfolgt die Verschiebung des Signals im Zeitbereich nach "links". Daher ist diese Art der Verschiebung als Linksverschiebung des Signals bekannt.
Example
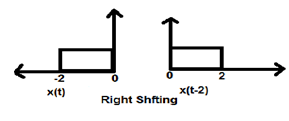
Fall 2 (K <0)
Wenn K kleiner als Null ist, findet die Verschiebung des Signals nach rechts im Zeitbereich statt. Daher wird diese Art der Verschiebung als Rechtsverschiebung bezeichnet.
Example
Die folgende Abbildung zeigt die Verschiebung eines Signals nach rechts um 2.
Amplitudenverschiebung
Amplitudenverschiebung bedeutet Signalverschiebung im Amplitudenbereich (um die X-Achse). Mathematisch kann es dargestellt werden als -
$$x(t) \rightarrow x(t)+K$$Dieser K-Wert kann positiv oder negativ sein. Dementsprechend haben wir zwei Arten der Amplitudenverschiebung, die nachfolgend diskutiert werden.
Fall 1 (K> 0)
Wenn K größer als Null ist, erfolgt die Signalverschiebung in der x-Achse nach oben. Daher ist diese Art der Verschiebung als Aufwärtsverschiebung bekannt.
Example
Betrachten wir ein Signal x (t), das gegeben ist als;
$$x = \begin{cases}0, & t < 0\\1, & 0\leq t\leq 2\\ 0, & t>0\end{cases}$$Nehmen wir K = + 1, damit ein neues Signal geschrieben werden kann als -
$y(t) \rightarrow x(t)+1$ Also kann y (t) endlich geschrieben werden als;
$$x(t) = \begin{cases}1, & t < 0\\2, & 0\leq t\leq 2\\ 1, & t>0\end{cases}$$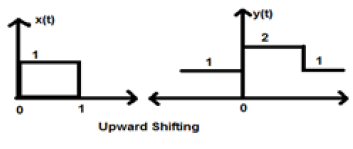
Fall 2 (K <0)
Wenn K kleiner als Null ist, erfolgt eine Signalverschiebung in der X-Achse nach unten. Daher wird es als Abwärtsverschiebung des Signals bezeichnet.
Example
Betrachten wir ein Signal x (t), das gegeben ist als;
$$x(t) = \begin{cases}0, & t < 0\\1, & 0\leq t\leq 2\\ 0, & t>0\end{cases}$$Nehmen wir K = -1, damit neues Signal geschrieben werden kann als;
$y(t)\rightarrow x(t)-1$ Also kann y (t) endlich geschrieben werden als;
$$y(t) = \begin{cases}-1, & t < 0\\0, & 0\leq t\leq 2\\ -1, & t>0\end{cases}$$
Durch Skalieren eines Signals wird eine Konstante mit der Zeit oder Amplitude des Signals multipliziert.
Zeitskalierung
Wenn eine Konstante mit der Zeitachse multipliziert wird, spricht man von Zeitskalierung. Dies kann mathematisch dargestellt werden als;
$x(t) \rightarrow y(t) = x(\alpha t)$ oder $x(\frac{t}{\alpha})$;; wobei α ≠ 0 ist
Wenn also die y-Achse gleich ist, nimmt die Größe der x-Achse entsprechend dem Vorzeichen der Konstanten (ob positiv oder negativ) ab oder zu. Daher kann die Skalierung auch in zwei Kategorien unterteilt werden, wie nachstehend erläutert wird.
Zeitkomprimierung
Immer wenn Alpha größer als Null ist, wird die Amplitude des Signals durch Alpha geteilt, während der Wert der Y-Achse gleich bleibt. Dies wird als Zeitkomprimierung bezeichnet.
Example
Betrachten wir ein Signal x (t), das wie in der folgenden Abbildung dargestellt ist. Nehmen wir den Wert von Alpha als 2. Also ist y (t) x (2t), was in der angegebenen Abbildung dargestellt ist.

Aus den obigen Abbildungen ist klar ersichtlich, dass die Zeitgröße in der y-Achse gleich bleibt, die Amplitude in der x-Achse jedoch von 4 auf 2 abnimmt. Daher handelt es sich um eine Zeitkomprimierung.
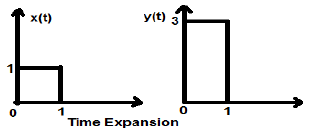
Zeiterweiterung
Wenn die Zeit durch das konstante Alpha geteilt wird, wird die Größe des Signals auf der Y-Achse multipliziert, wobei die Größe der X-Achse unverändert bleibt. Daher wird dies als Zeiterweiterungssignal bezeichnet.
Example
Betrachten wir ein quadratisches Signal x (t) der Größe 1. Wenn wir es zeitlich mit einer Konstanten 3 skalieren, so dass $x(t) \rightarrow y(t) \rightarrow x(\frac{t}{3})$Dann wird die Amplitude des Signals um das Dreifache geändert, was in der folgenden Abbildung dargestellt ist.
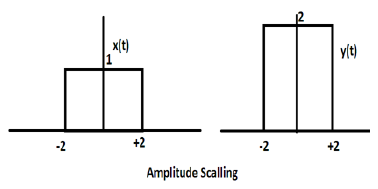
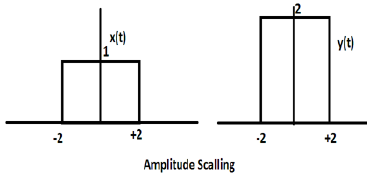
Amplitudenskalierung
Die Multiplikation einer Konstanten mit der Amplitude des Signals bewirkt eine Amplitudenskalierung. Abhängig vom Vorzeichen der Konstante kann es sich entweder um eine Amplitudenskalierung oder eine Dämpfung handeln. Betrachten wir ein Rechtecksignal x (t) = Π (t / 4).
Angenommen, wir definieren eine andere Funktion y (t) = 2 Π (t / 4). In diesem Fall wird der Wert der y-Achse verdoppelt, wobei der Wert der Zeitachse unverändert bleibt. Das ist in der folgenden Abbildung dargestellt.
Betrachten Sie eine andere Rechteckwellenfunktion, die als z (t) definiert ist, wobei z (t) = 0,5 Π (t / 4) ist. Hier ist die Amplitude der Funktion z (t) halb so groß wie die von x (t), dh die Zeitachse bleibt gleich, die Amplitudenachse wird halbiert. Dies wird durch die folgende Abbildung veranschaulicht.
Immer wenn die Zeit in einem Signal mit -1 multipliziert wird, wird das Signal umgekehrt. Es erzeugt sein Spiegelbild um die Y- oder X-Achse. Dies wird als Umkehrung des Signals bezeichnet.
Die Umkehrung kann basierend auf der Bedingung, ob die Zeit oder die Amplitude des Signals mit -1 multipliziert wird, in zwei Typen eingeteilt werden.
Zeitumkehr
Immer wenn die Zeit des Signals mit -1 multipliziert wird, spricht man von einer Zeitumkehr des Signals. In diesem Fall erzeugt das Signal sein Spiegelbild um die Y-Achse. Mathematisch kann dies geschrieben werden als;
$$x(t) \rightarrow y(t) \rightarrow x(-t)$$Dies kann am besten anhand des folgenden Beispiels verstanden werden.

Im obigen Beispiel können wir deutlich sehen, dass das Signal um seine Y-Achse umgekehrt wurde. Es ist also auch eine Art der Zeitskalierung, aber hier ist die Skalierungsgröße immer (-1).
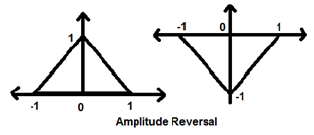
Amplitudenumkehr
Immer wenn die Amplitude eines Signals mit -1 multipliziert wird, spricht man von einer Amplitudenumkehr. In diesem Fall erzeugt das Signal sein Spiegelbild um die X-Achse. Mathematisch kann dies geschrieben werden als;
$$x(t)\rightarrow y(t)\rightarrow -x(t)$$Betrachten Sie das folgende Beispiel. Die Amplitudenumkehr ist deutlich zu erkennen.
Zwei sehr wichtige Operationen, die an den Signalen ausgeführt werden, sind Differenzierung und Integration.
Differenzierung
Die Differenzierung eines Signals x (t) bedeutet eine Steigungsdarstellung dieses Signals in Bezug auf die Zeit. Mathematisch wird es dargestellt als;
$$x(t)\rightarrow \frac{dx(t)}{dt}$$Bei der OPAMP-Differenzierung ist diese Methode sehr hilfreich. Wir können ein Signal leicht grafisch unterscheiden, anstatt die Formel zu verwenden. Voraussetzung ist jedoch, dass das Signal entweder rechteckig oder dreieckig ist, was in den meisten Fällen der Fall ist.
| Ursprüngliches Signal | Differenziertes Signal |
|---|---|
| Rampe | Schritt |
| Schritt | Impuls |
| Impuls | 1 |
Die obige Tabelle zeigt den Zustand des Signals nach der Differenzierung. Beispielsweise wird ein Rampensignal nach der Differenzierung in ein Stufensignal umgewandelt. In ähnlicher Weise wird ein Einheitsschritt-Signal zu einem Impulssignal.
Beispiel
Lass das uns gegebene Signal sein $x(t) = 4[r(t)-r(t-2)]$. Wenn dieses Signal aufgezeichnet wird, sieht es wie das auf der linken Seite der unten angegebenen Abbildung aus. Unser Ziel ist es nun, das gegebene Signal zu differenzieren.
Zunächst werden wir die gegebene Gleichung differenzieren. Wir wissen, dass das Rampensignal nach der Differenzierung ein Einheitsschritt-Signal ergibt.
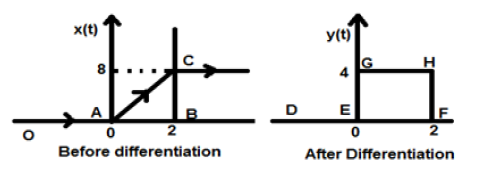
Unser resultierendes Signal y (t) kann also wie folgt geschrieben werden:
$y(t) = \frac{dx(t)}{dt}$
$= \frac{d4[r(t)-r(t-2)]}{dt}$
$= 4[u(t)-u(t-2)]$
Nun wird schließlich dieses Signal aufgezeichnet, das auf der rechten Seite der obigen Abbildung dargestellt ist.
Die Integration eines Signals bedeutet die Summierung dieses Signals in einem bestimmten Zeitbereich, um ein modifiziertes Signal zu erhalten. Mathematisch kann dies dargestellt werden als -
$$x(t)\rightarrow y(t) = \int_{-\infty}^{t}x(t)dt$$Auch hier können wir in den meisten Fällen eine mathematische Integration durchführen und das resultierende Signal finden, aber eine direkte Integration in schneller Folge ist für Signale möglich, die in rechteckigem Format grafisch dargestellt sind. Wie bei der Differenzierung werden wir auch hier auf eine Tabelle verweisen, um das Ergebnis schnell zu erhalten.
| Ursprüngliches Signal | Integriertes Signal |
|---|---|
| 1 | Impuls |
| Impuls | Schritt |
| Schritt | Rampe |
Beispiel
Betrachten wir ein Signal $x(t) = u(t)-u(t-3)$. Es ist in Fig. 1 unten gezeigt. Wir können deutlich sehen, dass es sich um ein Schrittsignal handelt. Jetzt werden wir es integrieren. In Bezug auf die Tabelle wissen wir, dass die Integration des Stufensignals ein Rampensignal ergibt.
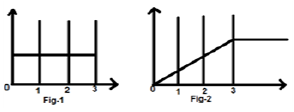
Wir werden es jedoch mathematisch berechnen,
$y(t) = \int_{-\infty}^{t}x(t)dt$
$= \int_{-\infty}^{t}[u(t)-u(t-3)]dt$
$= \int_{-\infty}^{t}u(t)dt-\int_{-\infty}^{t}u(t-3)dt$
$= r(t)-r(t-3)$
Das gleiche ist wie in Fig. 2 gezeigt aufgetragen.
Die Faltung zweier Signale im Zeitbereich entspricht der Multiplikation ihrer Darstellung im Frequenzbereich. Mathematisch können wir die Faltung zweier Signale als schreiben
$$y(t) = x_{1}(t)*x_{2}(t)$$ $$= \int_{-\infty}^{\infty}x_{1}(p).x_{2}(t-p)dp$$Schritte zur Faltung
- Nehmen Sie das Signal x 1 (t) und setzen Sie dort t = p, so dass es x 1 (p) ist.
- Nehmen Sie das Signal x 2 (t) und machen Sie den Schritt 1 und machen Sie es x 2 (p).
- Machen Sie die Faltung des Signals dh x 2 (-p).
- Führen Sie die Zeitverschiebung des obigen Signals x 2 durch [- (pt)]
- Führen Sie dann die Multiplikation beider Signale durch. dh$x_{1}(p).x_{2}[−(p−t)]$
Beispiel
Lassen Sie uns die Faltung eines Schrittsignals u (t) mit seiner eigenen Art durchführen.
$y(t) = u(t)*u(t)$
$= \int_{-\infty}^{\infty}[u(p).u[-(p-t)]dp$
Nun kann dieses t größer oder kleiner als Null sein, die in den folgenden Figuren gezeigt sind
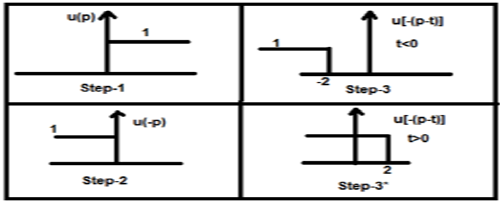
Im obigen Fall ergibt sich das Ergebnis mit folgenden Möglichkeiten
$y(t) = \begin{cases}0, & if\quad t<0\\\int_{0}^{t}1dt, & for\quad t>0\end{cases}$
$= \begin{cases}0, & if\quad t<0\\t, & t>0\end{cases} = r(t)$
Eigenschaften der Faltung
Kommutativ
Es besagt, dass die Reihenfolge der Faltung keine Rolle spielt, was mathematisch als dargestellt werden kann
$$x_{1}(t)*x_{2}(t) = x_{2}(t)*x_{1}(t)$$Assoziativ
Es besagt, dass die Reihenfolge der Faltung mit drei Signalen alles sein kann. Mathematisch kann es gezeigt werden als;
$$x_{1}(t)*[x_{2}(t)*x_{3}(t)] = [x_{1}(t)*x_{2}(t)]*x_{3}(t)$$Verteilend
Zuerst können zwei Signale hinzugefügt werden, und dann kann ihre Faltung zum dritten Signal erfolgen. Dies entspricht der Faltung zweier Signale einzeln mit dem dritten Signal, die schließlich addiert werden. Mathematisch kann dies geschrieben werden als;
$$x_{1}(t)*[x_{2}(t)+x_{3}(t)] = [x_{1}(t)*x_{2}(t)+x_{1}(t)*x_{3}(t)]$$Bereich
Wenn ein Signal das Ergebnis der Faltung zweier Signale ist, ist die Fläche des Signals die Multiplikation dieser einzelnen Signale. Mathematisch kann dies geschrieben werden
Wenn $y(t) = x_{1}*x_{2}(t)$
Dann ist Fläche von y (t) = Fläche von x 1 (t) X Fläche von x 2 (t)
Skalierung
Wenn zwei Signale auf eine unbekannte Konstante "a" skaliert werden und die Faltung erfolgt, wird das resultierende Signal ebenfalls auf dieselbe Konstante "a" gefaltet und durch diese Größe geteilt, wie unten gezeigt.
Wenn, $x_{1}(t)*x_{2}(t) = y(t)$
Dann, $x_{1}(at)*x_{2}(at) = \frac{y(at)}{a}, a \ne 0$
Verzögern
Angenommen, ein Signal y (t) ist ein Ergebnis der Faltung zweier Signale x1 (t) und x2 (t). Wenn die beiden Signale um die Zeit t1 bzw. t2 verzögert sind, wird das resultierende Signal y (t) um (t1 + t2) verzögert. Mathematisch kann es geschrieben werden als -
Wenn, $x_{1}(t)*x_{2}(t) = y(t)$
Dann, $x_{1}(t-t_{1})*x_{2}(t-t_{2}) = y[t-(t_{1}+t_{2})]$
Gelöste Beispiele
Example 1 - Finden Sie die Faltung der Signale u (t-1) und u (t-2).
Solution- Gegebene Signale sind u (t-1) und u (t-2). Ihre Faltung kann wie unten gezeigt erfolgen -
$y(t) = u(t-1)*u(t-2)$
$y(t) = \int_{-\infty}^{+\infty}[u(t-1).u(t-2)]dt$
$= r(t-1)+r(t-2)$
$= r(t-3)$
Example 2 - Finden Sie die Faltung von zwei Signalen gegeben durch
$x_{1}(n) = \lbrace 3,-2, 2\rbrace $
$x_{2}(n) = \begin{cases}2, & 0\leq n\leq 4\\0, & x > elsewhere\end{cases}$
Solution - -
x 2 (n) kann als decodiert werden$x_{2}(n) = \lbrace 2,2,2,2,2\rbrace Originalfirst$
x 1 (n) ist zuvor angegeben$= \lbrace 3,-2,3\rbrace = 3-2Z^{-1}+2Z^{-2}$
Ähnlich, $x_{2}(z) = 2+2Z^{-1}+2Z^{-2}+2Z^{-3}+2Z^{-4}$
Resultierendes Signal,
$X(Z) = X_{1}(Z)X_{2}(z)$
$= \lbrace 3-2Z^{-1}+2Z^{-2}\rbrace \times \lbrace 2+2Z^{-1}+2Z^{-2}+2Z^{-3}+2Z^{-4}\rbrace$
$= 6+2Z^{-1}+6Z^{-2}+6Z^{-3}+6Z^{-4}+6Z^{-5}$
Wenn wir die obige inverse Z-Transformation nehmen, erhalten wir das resultierende Signal als
$x(n) = \lbrace 6,2,6,6,6,0,4\rbrace$ Herkunft am ersten
Example 3 - Bestimmen Sie die Faltung der folgenden 2 Signale -
$x(n) = \lbrace 2,1,0,1\rbrace$
$h(n) = \lbrace 1,2,3,1\rbrace$
Solution - -
Wenn wir die Z-Transformation der Signale nehmen, erhalten wir:
$x(z) = 2+2Z^{-1}+2Z^{-3}$
Und $h(n) = 1+2Z^{-1}+3Z^{-2}+Z^{-3}$
Die Faltung zweier Signale bedeutet nun die Multiplikation ihrer Z-Transformationen
Das ist $Y(Z) = X(Z) \times h(Z)$
$= \lbrace 2+2Z^{-1}+2Z^{-3}\rbrace \times \lbrace 1+2Z^{-1}+3Z^{-2}+Z^{-3}\rbrace$
$= \lbrace 2+5Z^{-1}+8Z^{-2}+6Z^{-3}+3Z^{-4}+3Z^{-5}+Z^{-6}\rbrace$
Unter Verwendung der inversen Z-Transformation kann das resultierende Signal wie folgt geschrieben werden:
$y(n) = \lbrace 2,5,8,6,6,1 \rbrace Originalfirst$
Einige Systeme haben Feedback und andere nicht. Bei solchen, die keine Rückkopplungssysteme haben, hängt ihre Ausgabe nur von den aktuellen Werten der Eingabe ab. Der vergangene Wert der Daten ist zu diesem Zeitpunkt nicht vorhanden. Diese Arten von Systemen werden als statische Systeme bezeichnet. Es hängt auch nicht von zukünftigen Werten ab.
Da diese Systeme keine früheren Aufzeichnungen haben, haben sie auch keinen Speicher. Daher sagen wir, dass alle statischen Systeme speicherlose Systeme sind. Nehmen wir ein Beispiel, um dieses Konzept besser zu verstehen.
Beispiel
Lassen Sie uns überprüfen, ob die folgenden Systeme statische Systeme sind oder nicht.
- $y(t) = x(t)+x(t-1)$
- $y(t) = x(2t)$
- $y(t) = x = \sin [x(t)]$
ein) $y(t) = x(t)+x(t-1)$
Hier ist x (t) der aktuelle Wert. Es hat keine Beziehung zu den vergangenen Werten der Zeit. Es ist also ein statisches System. Im Fall von x (t-1) wird jedoch, wenn wir t = 0 setzen, auf x (-1) reduziert, was von einem vergangenen Wert abhängt. Es ist also nicht statisch. Daher ist y (t) hier kein statisches System.
b) $y(t) = x(2t)$
Wenn wir t = 2 einsetzen, ist das Ergebnis y (t) = x (4). Auch hier ist es zukünftig wertabhängig. Es ist also auch kein statisches System.
c) $y(t) = x = \sin [x(t)]$
In diesem Ausdruck haben wir es mit der Sinusfunktion zu tun. Der Bereich der Sinusfunktion liegt zwischen -1 und +1. Unabhängig von den Werten, die wir für x (t) einsetzen, werden wir zwischen -1 und +1 liegen. Daher können wir sagen, dass es nicht von vergangenen oder zukünftigen Werten abhängt. Daher ist es ein statisches System.
Aus den obigen Beispielen können wir die folgenden Schlussfolgerungen ziehen:
- Jedes System mit Zeitverschiebung ist nicht statisch.
- Jedes System mit Amplitudenverschiebung ist auch nicht statisch.
- Integrations- und Differenzierungsfälle sind ebenfalls nicht statisch.
Wenn ein System zu irgendeinem Zeitpunkt vom vergangenen und zukünftigen Wert des Signals abhängt, wird es als dynamisches System bezeichnet. Im Gegensatz zu statischen Systemen sind dies keine speicherlosen Systeme. Sie speichern vergangene und zukünftige Werte. Daher benötigen sie etwas Speicher. Lassen Sie uns diese Theorie anhand einiger Beispiele besser verstehen.
Beispiele
Finden Sie heraus, ob die folgenden Systeme dynamisch sind.
a) $y(t) = x(t+1)$
In diesem Fall wird t = 1 in die Gleichung umgewandelt und in x (2) konvertiert, was ein zukünftiger abhängiger Wert ist. Denn hier geben wir die Eingabe als 1 an, aber sie zeigt den Wert für x (2) an. Da es sich um ein zukunftsabhängiges Signal handelt, handelt es sich eindeutig um ein dynamisches System.
b) $y(t) = Real[x(t)]$
$$= \frac{[x(t)+x(t)^*]}{2}$$In diesem Fall wird unabhängig vom Wert, den wir eingeben, das Zeit-Realwertsignal angezeigt. Es besteht keine Abhängigkeit von zukünftigen oder vergangenen Werten. Daher ist es kein dynamisches System, sondern ein statisches System.
c) $y(t) = Even[x(t)]$
$$= \frac{[x(t)+x(-t)]}{2}$$Wenn wir hier t = 1 einsetzen, zeigt ein Signal x (1) und ein anderes zeigt x (-1), was ein vergangener Wert ist. Wenn wir t = -1 setzen, zeigt ein Signal x (-1) und ein anderes x (1), was ein zukünftiger Wert ist. Daher handelt es sich eindeutig um ein dynamisches System.
d) $y(t) = \cos [x(t)]$
In diesem Fall hat das System, da es eine Kosinusfunktion ist, einen bestimmten Wertebereich, der zwischen -1 und +1 liegt. Unabhängig davon, welche Werte wir eingeben, erhalten wir das Ergebnis innerhalb der angegebenen Grenzen. Daher ist es ein statisches System
Aus den obigen Beispielen können wir die folgenden Schlussfolgerungen ziehen:
- Alle zeitversetzten Fälle sind dynamische Signale.
- Auch bei der Zeitskalierung sind alle Signale dynamische Signale.
- Integrationsfall-Signale sind dynamische Signale.
Zuvor haben wir gesehen, dass das System unabhängig von den zukünftigen und vergangenen Werten sein muss, um statisch zu werden. In diesem Fall ist der Zustand mit nur geringen Änderungen nahezu gleich. Damit das System kausal ist, sollte es nur von den zukünftigen Werten unabhängig sein. Das bedeutet, dass die Abhängigkeit in der Vergangenheit kein Problem für das System darstellt, kausal zu werden.
Kausalsysteme sind praktisch oder physikalisch realisierbare Systeme. Betrachten wir einige Beispiele, um dies viel besser zu verstehen.
Beispiele
Betrachten wir die folgenden Signale.
a) $y(t) = x(t)$
Hier ist das Signal nur von den aktuellen Werten von x abhängig. Wenn wir beispielsweise t = 3 einsetzen, wird das Ergebnis nur für diesen Zeitpunkt angezeigt. Da es keine Abhängigkeit vom zukünftigen Wert hat, können wir es daher als Kausalsystem bezeichnen.
b) $y(t) = x(t-1)$
Hier hängt das System von früheren Werten ab. Wenn wir zum Beispiel t = 3 einsetzen, wird der Ausdruck auf x (2) reduziert, was ein vergangener Wert für unsere Eingabe ist. In keinem Fall hängt es von zukünftigen Werten ab. Daher ist dieses System auch ein Kausalsystem.
c) $y(t) = x(t)+x(t+1)$
In diesem Fall besteht das System aus zwei Teilen. Der Teil x (t) hängt, wie wir zuvor besprochen haben, nur von den gegenwärtigen Werten ab. Es gibt also kein Problem damit. Wenn wir jedoch den Fall von x (t + 1) nehmen, hängt dies eindeutig von den zukünftigen Werten ab, denn wenn wir t = 1 setzen, wird der Ausdruck auf x (2) reduziert, was ein zukünftiger Wert ist. Daher ist es nicht kausal.
Ein nicht-kausales System ist dem des kausalen Systems genau entgegengesetzt. Wenn ein System zu irgendeinem Zeitpunkt von den zukünftigen Werten der Eingabe abhängt, wird das System als nicht kausales System bezeichnet.
Beispiele
Nehmen wir einige Beispiele und versuchen Sie, dies besser zu verstehen.
a) $y(t) = x(t+1)$
Wir haben dieses System bereits im Kausalsystem diskutiert. Bei jeder Eingabe wird das System auf seinen zukünftigen Wert reduziert. Wenn wir zum Beispiel t = 2 setzen, wird es auf x (3) reduziert, was ein zukünftiger Wert ist. Daher ist das System nicht kausal.
b) $y(t) = x(t)+x(t+2)$
In diesem Fall ist x (t) eine rein vom Barwert abhängige Funktion. Wir haben bereits diskutiert, dass die Funktion x (t + 2) zukunftsabhängig ist, da sie für t = 3 Werte für x (5) ergibt. Daher ist es nicht kausal.
c) $y(t) = x(t-1)+x(t)$
In diesem System hängt es von den gegenwärtigen und vergangenen Werten der gegebenen Eingabe ab. Unabhängig davon, welche Werte wir ersetzen, wird es niemals eine zukünftige Abhängigkeit geben. Es ist eindeutig kein nicht kausales System; Vielmehr handelt es sich um ein Kausalsystem.
Ein antikausales System ist nur eine etwas modifizierte Version eines nicht kausalen Systems. Das System hängt nur von den zukünftigen Werten der Eingabe ab. Es besteht keine Abhängigkeit von gegenwärtigen oder vergangenen Werten.
Beispiele
Finden Sie heraus, ob die folgenden Systeme nicht kausal sind.
a) $y(t) = x(t)+x(t-1)$
Das System hat zwei Unterfunktionen. Eine Unterfunktion x (t + 1) hängt vom zukünftigen Wert der Eingabe ab, eine andere Unterfunktion x (t) hängt nur von der Gegenwart ab. Da das System neben dem zukünftigen Wert auch vom Barwert abhängig ist, ist dieses System nicht kausal.
b) $y(t) = x(t+3)$
Wenn wir das obige System analysieren, können wir sehen, dass das System nur von den zukünftigen Werten des Systems abhängt, dh wenn wir t = 0 setzen, wird es auf x (3) reduziert, was ein zukünftiger Wert ist. Dieses System ist ein perfektes Beispiel für ein antikausales System.
Ein lineares System folgt den Überlagerungsgesetzen. Dieses Gesetz ist eine notwendige und ausreichende Bedingung, um die Linearität des Systems zu beweisen. Abgesehen davon ist das System eine Kombination aus zwei Arten von Gesetzen -
- Gesetz der Additivität
- Gesetz der Homogenität

Sowohl das Gesetz der Homogenität als auch das Gesetz der Additivität sind in den obigen Figuren gezeigt. Es gibt jedoch einige andere Bedingungen, um zu überprüfen, ob das System linear ist oder nicht.
The conditions are - -
- Der Ausgang sollte für den Eingang Null Null sein.
- Im System sollte kein nichtlinearer Operator vorhanden sein.
Beispiele für nichtlineare Operatoren -
(a) Trigonometrische Operatoren - Sin, Cos, Tan, Cot, Sec, Cosec usw.
(b) Exponential, Logarithmus, Modul, Quadrat, Würfel usw.
(c) sa (i / p), Sinc (i / p), Sqn (i / p) usw.
Entweder Eingabe x oder Ausgabe y sollten diese nichtlinearen Operatoren nicht haben.
Beispiele
Lassen Sie uns herausfinden, ob die folgenden Systeme linear sind.
a) $y(t) = x(t)+3$
Dieses System ist kein lineares System, da es die erste Bedingung verletzt. Wenn wir die Eingabe als Null setzen und x (t) = 0 machen, ist die Ausgabe nicht Null.
b) $y(t) = \sin tx(t)$
Wenn wir in diesem System die Eingabe als Null angeben, wird die Ausgabe zu Null. Somit ist die erste Bedingung eindeutig erfüllt. Auch hier gibt es keinen nichtlinearen Operator, der auf x (t) angewendet wurde. Somit ist auch die zweite Bedingung erfüllt. Daher ist das System ein lineares System.
c) $y(t) = \sin (x(t))$
In dem obigen System ist die erste Bedingung erfüllt, denn wenn wir x (t) = 0 setzen, ist die Ausgabe auch sin (0) = 0. Die zweite Bedingung ist jedoch nicht erfüllt, da es einen nichtlinearen Operator gibt, der arbeitet x (t). Daher ist das System nicht linear.
Wenn wir dieses System definieren wollen, können wir sagen, dass die Systeme, die nicht linear sind, nichtlineare Systeme sind. In diesem Fall sollten natürlich alle Bedingungen erfüllt sein, die in den linearen Systemen verletzt werden.
Bedingungen
Der Ausgang sollte nicht Null sein, wenn der angelegte Eingang Null ist.
Jeder nichtlineare Operator kann entweder auf den Eingang oder auf den Ausgang angewendet werden, um das System nichtlinear zu machen.
Beispiele
Um herauszufinden, ob die angegebenen Systeme linear oder nicht linear sind.
a) $y(t) = e^{x(t)}$
In dem obigen System ist die erste Bedingung erfüllt, denn wenn wir die Eingabe auf Null setzen, ist die Ausgabe 1. Zusätzlich wird ein exponentieller nichtlinearer Operator auf die Eingabe angewendet. Es handelt sich eindeutig um ein nichtlineares System.
b) $y(t) = x(t+1)+x(t-1)$
Der obige Systemtyp behandelt sowohl vergangene als auch zukünftige Werte. Wenn wir jedoch die Eingabe auf Null setzen, ist keiner der Werte vorhanden. Daher können wir sagen, wenn die Eingabe Null ist, dann ist auch die zeitskalierte und zeitversetzte Version der Eingabe Null, was unsere erste Bedingung verletzt. Auch hier ist kein nichtlinearer Operator vorhanden. Daher wird auch die zweite Bedingung verletzt. Dieses System ist eindeutig kein nichtlineares System. Vielmehr ist es ein lineares System.
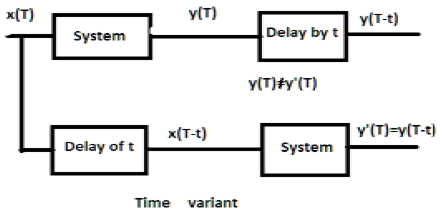
Bei einem zeitinvarianten System sollten Ausgabe und Eingabe um eine Zeiteinheit verzögert werden. Jede in der Eingabe vorgesehene Verzögerung muss für ein zeitinvariantes System in der Ausgabe berücksichtigt werden.
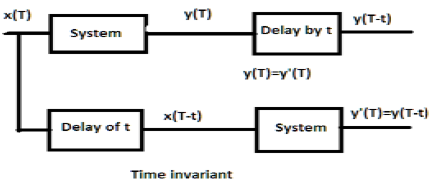
Beispiele
a) $y(T) = x(2T)$
Wenn der obige Ausdruck vorliegt, wird er zuerst durch das System und dann durch die Zeitverzögerung geleitet (wie im oberen Teil der Figur gezeigt); dann wird die Ausgabe$x(2T-2t)$. Nun wird der gleiche Ausdruck zuerst durch eine Zeitverzögerung und dann durch das System geleitet (wie im unteren Teil der Abbildung gezeigt). Die Ausgabe wird$x(2T-t)$.
Daher ist das System kein zeitinvariantes System.
b) $y(T) = \sin [x(T)]$
Wenn das Signal zuerst durch das System und dann durch den Zeitverzögerungsprozess geleitet wird, ist der Ausgang $\sin x(T-t)$. In ähnlicher Weise wird die Ausgabe ausgegeben, wenn das System zuerst die Zeitverzögerung und dann das System durchläuft$\sin x(T-t)$. Wir können deutlich sehen, dass beide Ausgänge gleich sind. Daher ist das System zeitinvariant.
Auch für ein zeitvariantes System sollten Ausgabe und Eingabe um eine Zeitkonstante verzögert sein, aber die Verzögerung am Eingang sollte sich nicht am Ausgang widerspiegeln. Alle Fälle der Zeitskalierung sind Beispiele für zeitvariante Systeme. In ähnlicher Weise ist das System auch eine Zeitvariante, wenn der Koeffizient in der Systembeziehung eine Funktion der Zeit ist.
Beispiele
a) $y(t) = x[\cos T]$
Wenn das obige Signal zuerst durch das System und dann durch die Zeitverzögerung geleitet wird, ist der Ausgang $x\cos (T-t)$. Wenn es zuerst durch die Zeitverzögerung und dann durch das System geleitet wird, wird es sein$x(\cos T-t)$. Da die Ausgänge nicht gleich sind, ist das System zeitlich variabel.
b) $y(T) = \cos T.x(T)$
Wenn der obige Ausdruck zuerst durch das System und dann durch die Zeitverzögerung geleitet wird, ist die Ausgabe $\cos(T-t)x(T-t)$. Wenn der Ausdruck jedoch zuerst durch die Zeitverzögerung und dann durch das System geleitet wird, erfolgt die Ausgabe$\cos T.x(T-t)$. Da die Ausgänge nicht gleich sind, ist das System eindeutig eine Zeitvariante.
Ein stabiles System erfüllt die BIBO-Bedingung (Bounded Input for Bounded Output). Begrenzt bedeutet hier eine endliche Amplitude. Für ein stabiles System sollte die Ausgabe zu jedem Zeitpunkt begrenzt oder endlich sein, für endliche oder begrenzte Eingabe.
Einige Beispiele für begrenzte Eingaben sind Funktionen von Sinus, Cosinus, Gleichstrom, Vorzeichen und Einheitsschritt.
Beispiele
a) $y(t) = x(t)+10$
Hier können wir für eine bestimmte begrenzte Eingabe eine bestimmte begrenzte Ausgabe erhalten, dh wenn wir setzen $x(t) = 2, y(t) = 12$das ist in der Natur begrenzt. Daher ist das System stabil.
b) $y(t) = \sin [x(t)]$
Im gegebenen Ausdruck wissen wir, dass Sinusfunktionen eine bestimmte Wertegrenze haben, die zwischen -1 und +1 liegt. Unabhängig davon, welche Werte wir bei x (t) einsetzen, erhalten wir die Werte innerhalb unserer Grenzen. Daher ist das System stabil.
Instabile Systeme erfüllen die BIBO-Bedingungen nicht. Daher können wir für eine begrenzte Eingabe bei instabilen Systemen keine begrenzte Ausgabe erwarten.
Beispiele
a) $y(t) = tx(t)$
Hier können wir für eine endliche Eingabe keine endliche Ausgabe erwarten. Zum Beispiel, wenn wir setzen$x(t) = 2 \Rightarrow y(t) = 2t$. Dies ist kein endlicher Wert, da wir den Wert von t nicht kennen. Es kann also von überall aus erreicht werden. Daher ist dieses System nicht stabil. Es ist ein instabiles System.
b) $y(t) = \frac{x(t)}{\sin t}$
Wir haben zuvor diskutiert, dass die Sinusfunktion einen bestimmten Bereich von -1 bis +1 hat; aber hier ist es im Nenner vorhanden. Wenn wir also im schlimmsten Fall t = 0 setzen und die Sinusfunktion Null wird, tendiert das gesamte System zur Unendlichkeit. Daher ist dieser Systemtyp überhaupt nicht stabil. Offensichtlich ist dies ein instabiles System.
Example 1 - Überprüfen Sie, ob $y(t) = x*(t)$ ist linear oder nicht linear.
Solution- Die Funktion repräsentiert das Konjugat der Eingabe. Sie kann entweder durch das erste Homogenitätsgesetz und das Additivitätsgesetz oder durch die beiden Regeln überprüft werden. Das Überprüfen durch Regeln ist jedoch viel einfacher, daher werden wir uns daran halten.
Wenn die Eingabe in das System Null ist, tendiert die Ausgabe ebenfalls zu Null. Damit ist unsere erste Bedingung erfüllt. Weder am Eingang noch am Ausgang wird ein nichtlinearer Operator verwendet. Daher ist das System linear.
Example 2 - Überprüfen Sie, ob $y(t)=\begin{cases}x(t+1), & t > 0\\x(t-1), & t\leq 0\end{cases}$ ist linear oder nicht linear
Solution- Wir können deutlich sehen, dass die Eingabe Null wird, wenn die Zeit kleiner oder gleich Null wird. Wir können also sagen, dass bei einem Eingang von Null auch der Ausgang Null ist und unsere erste Bedingung erfüllt ist.
Auch hier wird weder am Eingang noch am Ausgang ein nichtlinearer Operator verwendet. Daher ist das System linear.
Example 3 - Überprüfen Sie, ob $y(t) = \sin t.x(t)$ ist stabil oder nicht.
Solution - Angenommen, wir haben den Wert von x (t) als 3 angenommen. Hier wurde die Sinusfunktion damit multipliziert und der Maximal- und Minimalwert der Sinusfunktion variiert zwischen -1 und +1.
Daher variieren der Maximal- und Minimalwert der gesamten Funktion auch zwischen -3 und +3. Somit ist das System stabil, da wir hier eine begrenzte Eingabe für eine begrenzte Ausgabe erhalten.
Für Energie- und Leistungssignale gibt es eine diskrete Zeit-Fourier-Transformation (DTFT). Die Z-Transformation existiert auch nur für Signale vom Typ Energie oder Leistung (NENP), bis zu einem gewissen Grad. Der Ersatz$z=e^{jw}$ wird für die Umwandlung von Z-Transformation in DTFT nur für absolut summierbare Signale verwendet.
Die Z-Transformation des diskreten Zeitsignals x (n) in einer Potenzreihe kann also wie folgt geschrieben werden:
$$X(z) = \sum_{n-\infty}^\infty x(n)Z^{-n}$$Die obige Gleichung repräsentiert eine zweiseitige Z-Transformationsgleichung.
Wenn ein Signal Z-transformiert ist, kann es im Allgemeinen als - dargestellt werden
$$X(Z) = Z[x(n)]$$Oder $x(n) \longleftrightarrow X(Z)$
Wenn es sich um ein kontinuierliches Zeitsignal handelt, werden keine Z-Transformationen benötigt, da Laplace-Transformationen verwendet werden. Diskrete Zeitsignale können jedoch nur durch Z-Transformationen analysiert werden.
Region der Konvergenz
Konvergenzbereich ist der Bereich der komplexen Variablen Z in der Z-Ebene. Die Z-Transformation des Signals ist endlich oder konvergent. ROC repräsentiert also die Menge von Werten von Z, für die X (Z) einen endlichen Wert hat.
Eigenschaften von ROC
- ROC enthält keine Stange.
- Bei einem rechtsseitigen Signal befindet sich der ROC außerhalb des Kreises in der Z-Ebene.
- Für ein linksseitiges Signal befindet sich ROC innerhalb des Kreises in der Z-Ebene.
- Aus Stabilitätsgründen enthält ROC einen Einheitskreis in der Z-Ebene.
- Für beidseitiges Signal ist ROC ein Ring in der Z-Ebene.
- Für ein Signal mit endlicher Dauer ist ROC die gesamte Z-Ebene.
Die Z-Transformation ist einzigartig gekennzeichnet durch -
- Expression von X (Z)
- ROC von X (Z)
Signale und ihre ROC
| x (n) | X (Z) | ROC |
|---|---|---|
| $\delta(n)$ | $1$ | Gesamte Z-Ebene |
| $U(n)$ | $1/(1-Z^{-1})$ | Mod (Z)> 1 |
| $a^nu(n)$ | $1/(1-aZ^{-1})$ | Mod (Z)> Mod (a) |
| $-a^nu(-n-1)$ | $1/(1-aZ^{-1})$ | Mod (Z) <Mod (a) |
| $na^nu(n)$ | $aZ^{-1}/(1-aZ^{-1})^2$ | Mod (Z)> Mod (a) |
| $-a^nu(-n-1)$ | $aZ^{-1}/(1-aZ^{-1})^2$ | Mod (Z) <Mod (a) |
| $U(n)\cos \omega n$ | $(Z^2-Z\cos \omega)/(Z^2-2Z \cos \omega +1)$ | Mod (Z)> 1 |
| $U(n)\sin \omega n$ | $(Z\sin \omega)/(Z^2-2Z \cos \omega +1)$ | Mod (Z)> 1 |
Beispiel
Finden wir die Z-Transformation und den ROC eines Signals als $x(n) = \lbrace 7,3,4,9,5\rbrace$, wo der Ursprung der Serie bei 3 liegt.
Solution - Anwendung der Formel, die wir haben -
$X(z) = \sum_{n=-\infty}^\infty x(n)Z^{-n}$
$= \sum_{n=-1}^3 x(n)Z^{-n}$
$= x(-1)Z+x(0)+x(1)Z^{-1}+x(2)Z^{-2}+x(3)Z^{-3}$
$= 7Z+3+4Z^{-1}+9Z^{-2}+5Z^{-3}$
ROC ist die gesamte Z-Ebene ohne Z = 0, ∞, -∞
In diesem Kapitel werden wir die grundlegenden Eigenschaften von Z-Transformationen verstehen.
Linearität
Es heißt, wenn zwei oder mehr einzelne diskrete Signale mit Konstanten multipliziert werden, werden ihre jeweiligen Z-Transformationen auch mit denselben Konstanten multipliziert.
Mathematisch,
$$a_1x_1(n)+a_2x_2(n) = a_1X_1(z)+a_2X_2(z)$$Proof - Das wissen wir,
$$X(Z) = \sum_{n=-\infty}^\infty x(n)Z^{-n}$$$= \sum_{n=-\infty}^\infty (a_1x_1(n)+a_2x_2(n))Z^{-n}$
$= a_1\sum_{n = -\infty}^\infty x_1(n)Z^{-n}+a_2\sum_{n = -\infty}^\infty x_2(n)Z^{-n}$
$= a_1X_1(z)+a_2X_2(z)$ (Daher bewiesen)
Hier ist die Republik China $ROC_1\bigcap ROC_2$.
Zeitverschiebung
Die Zeitverschiebungseigenschaft zeigt, wie sich die Änderung des Zeitbereichs im diskreten Signal auf den Z-Bereich auswirkt, der wie folgt geschrieben werden kann:
$$x(n-n_0)\longleftrightarrow X(Z)Z^{-n}$$Oder $x(n-1)\longleftrightarrow Z^{-1}X(Z)$
Proof - -
Lassen $y(P) = X(P-K)$
$Y(z) = \sum_{p = -\infty}^\infty y(p)Z^{-p}$
$= \sum_{p = -\infty}^\infty (x(p-k))Z^{-p}$
Sei s = pk
$= \sum_{s = -\infty}^\infty x(s)Z^{-(s+k)}$
$= \sum_{s = -\infty}^\infty x(s)Z^{-s}Z^{-k}$
$= Z^{-k}[\sum_{s=-\infty}^\infty x(m)Z^{-s}]$
$= Z^{-k}X(Z)$ (Daher bewiesen)
Hier kann ROC geschrieben werden als Z = 0 (p> 0) oder Z = ∞ (p <0)
Beispiel
U (n) und U (n-1) können wie folgt aufgetragen werden
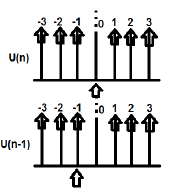
Die Z-Transformation von U (n) kann wie folgt geschrieben werden:
$\sum_{n = -\infty}^\infty [U(n)]Z^{-n} = 1$
Die Z-Transformation von U (n-1) kann geschrieben werden als;
$\sum_{n = -\infty}^\infty [U(n-1)]Z^{-n} = Z^{-1}$
Also hier $x(n-n_0) = Z^{-n_0}X(Z)$ (Daher bewiesen)
Zeitskalierung
Die Eigenschaft Zeitskalierung gibt an, wie die Z-Domäne des Signals aussehen wird, wenn die Zeit in ihrer diskreten Form skaliert wird, die wie folgt geschrieben werden kann:
$$a^nx(n) \longleftrightarrow X(a^{-1}Z)$$Proof - -
Lassen $y(p) = a^{p}x(p)$
$Y(P) = \sum_{p=-\infty}^\infty y(p)Z^{-p}$
$= \sum_{p=-\infty}^\infty a^px(p)Z^{-p}$
$= \sum_{p=-\infty}^\infty x(p)[a^{-1}Z]^{-p}$
$= X(a^{-1}Z)$(Daher bewiesen)
ROC: = Mod (ar1) <Mod (Z) <Mod (ar2) wobei Mod = Modul
Beispiel
Bestimmen wir die Z-Transformation von $x(n) = a^n \cos \omega n$ Verwenden der Zeitskalierungseigenschaft.
Solution - -
Wir wissen bereits, dass die Z-Transformation des Signals $\cos (\omega n)$ ist gegeben durch -
$$\sum_{n=-\infty}^\infty(\cos \omega n)Z^{-n} = (Z^2-Z \cos \omega)/(Z^2-2Z\cos \omega +1)$$
Wenden Sie nun die Zeitskalierungseigenschaft an, die Z-Transformation von $a^n \cos \omega n$ kann geschrieben werden als;
$\sum_{n=-\infty}^\infty(a^n\cos \omega n)Z^{-n} = X(a^{-1}Z)$
$= [(a^{-1}Z)^2-(a^{-1}Z \cos \omega n)]/((a^{-1}Z)^2-2(a^{-1}Z \cos \omega n)+1)$
$= Z(Z-a \cos \omega)/(Z^2-2az \cos \omega+a^2)$
Sukzessive Differenzierung
Die Eigenschaft der sukzessiven Differenzierung zeigt, dass eine Z-Transformation stattfindet, wenn wir das diskrete Signal im Zeitbereich in Bezug auf die Zeit differenzieren. Dies wird wie folgt gezeigt.
$$\frac{dx(n)}{dn} = (1-Z^{-1})X(Z)$$Proof - -
Betrachten Sie die LHS der Gleichung - $\frac{dx(n)}{dn}$
$$= \frac{[x(n)-x(n-1)]}{[n-(n-1)]}$$$= x(n)-X(n-1)$
$= x(Z)-Z^{-1}x(Z)$
$= (1-Z^{-1})x(Z)$ (Daher bewiesen)
ROC: R1 <Mod (Z) <R2
Beispiel
Finden wir die Z-Transformation eines Signals von $x(n) = n^2u(n)$
Durch Eigentum können wir schreiben
$Zz[nU(n)] = -Z\frac{dZ[U(n)]}{dz}$
$= -Z\frac{d[\frac{Z}{Z-1}]}{dZ}$
$= Z/((Z-1)^2$
$= y(let)$
Jetzt kann Z [ny] herausgefunden werden, indem die Eigenschaft erneut angewendet wird.
$Z(n,y) = -Z\frac{dy}{dz}$
$= -Z\frac{d[Z/(Z-1)^3]}{dz}$
$= Z(Z+1)/(Z-1)^2$
Faltung
Dies zeigt die Änderung der Z-Domäne des Systems, wenn eine Faltung in der diskreten Signalform stattfindet, die geschrieben werden kann als -
$x_1(n)*x_2(n) \longleftrightarrow X_1(Z).X_2(Z)$
Proof - -
$X(Z) = \sum_{n = -\infty}^\infty x(n)Z^{-n}$
$= \sum_{n=-\infty}^\infty[\sum_{k = -\infty}^\infty x_1(k)x_2(n-k)]Z^{-n}$
$= \sum_{k = -\infty}^\infty x_1(k)[\sum_n^\infty x_2(n-k)Z^{-n}]$
$= \sum_{k = -\infty}^\infty x_1(k)[\sum_{n = -\infty}^\infty x_2(n-k)Z^{-(n-k)}Z^{-k}]$
Sei nk = l, dann kann die obige Gleichung wie folgt geschrieben werden:
$X(Z) = \sum_{k = -\infty}^\infty x_1(k)[Z^{-k}\sum_{l=-\infty}^\infty x_2(l)Z^{-l}]$
$= \sum_{k = -\infty}^\infty x_1(k)X_2(Z)Z^{-k}$
$= X_2(Z)\sum_{k = -\infty}^\infty x_1(Z)Z^{-k}$
$= X_1(Z).X_2(Z)$ (Daher bewiesen)
ROC:$ROC\bigcap ROC2$
Beispiel
Finden wir die Faltung zweier Signale
$x_1(n) = \lbrace 3,-2,2\rbrace$ ... (Gleichung 1)
$x_2(n) = \lbrace 2,0\leq 4\quad and\quad 0\quad elsewhere\rbrace$ ... (Gleichung 2)
Die Z-Transformation der ersten Gleichung kann wie folgt geschrieben werden:
$\sum_{n = -\infty}^\infty x_1(n)Z^{-n}$
$= 3-2Z^{-1}+2Z^{-2}$
Die Z-Transformation des zweiten Signals kann wie folgt geschrieben werden:
$\sum_{n = -\infty}^\infty x_2(n)Z^{-n}$
$= 2+2Z^{-1}+2Z^{-2}+2Z^{-3}+2Z^{-4}$
Die Faltung der beiden obigen Signale ist also gegeben durch -
$X(Z) = [x_1(Z)^*x_2(Z)]$
$= [3-2Z^{-1}+2Z^{-2}]\times [2+2Z^{-1}+2Z^{-2}+2Z^{-3}+2Z^{-4}]$
$= 6+2Z^{-1}+6Z^{-2}+6Z^{-3}+...\quad...\quad...$
Nehmen wir die inverse Z-Transformation, die wir erhalten,
$x(n) = \lbrace 6,2,6,6,6,0,4\rbrace$
Anfangswert-Theorem
Wenn x (n) eine kausale Folge ist, deren Z-Transformation als X (z) vorliegt, kann der Anfangswertsatz wie folgt geschrieben werden:
$X(n)(at\quad n = 0) = \lim_{z \to \infty} X(z)$
Proof - Das wissen wir,
$X(Z) = \sum_{n = 0} ^\infty x(n)Z^{-n}$
Wenn wir die obige Reihe erweitern, erhalten wir;
$= X(0)Z^0+X(1)Z^{-1}+X(2)Z^{-2}+...\quad...$
$= X(0)\times 1+X(1)Z^{-1}+X(2)Z^{-2}+...\quad...$
Im obigen Fall wenn Z → ∞ dann $Z^{-n}\rightarrow 0$ (Weil n> 0)
Deshalb können wir sagen;
$\lim_{z \to \infty}X(z) = X(0)$ (Daher bewiesen)
Endwertsatz
Der Endwertsatz besagt, dass wenn die Z-Transformation eines Signals als X (Z) dargestellt wird und sich die Pole alle innerhalb des Kreises befinden, sein Endwert als x (n) oder X (∞) bezeichnet wird und als geschrieben werden kann - -
$X(\infty) = \lim_{n \to \infty}X(n) = \lim_{z \to 1}[X(Z)(1-Z^{-1})]$
Conditions - -
- Es gilt nur für Kausalsysteme.
- $X(Z)(1-Z^{-1})$ sollte Pole innerhalb des Einheitskreises in der Z-Ebene haben.
Proof - Das wissen wir
$Z^+[x(n+1)-x(n)] = \lim_{k \to \infty}\sum_{n=0}^kZ^{-n}[x(n+1)-x(n)]$
$\Rightarrow Z^+[x(n+1)]-Z^+[x(n)] = \lim_{k \to \infty}\sum_{n=0}^kZ^{-n}[x(n+1)-x(n)]$
$\Rightarrow Z[X(Z)^+-x(0)]-X(Z)^+ = \lim_{k \to \infty}\sum_{n = 0}^kZ^{-n}[x(n+1)-x(n)]$
Hier können wir die erweiterte Eigenschaft der einseitigen Z-Transformation anwenden. Die obige Gleichung kann also wie folgt umgeschrieben werden:
$Z^+[x(n+1)] = Z[X(2)^+-x(0)Z^0] = Z[X(Z)^+-x(0)]$
Wenn wir nun z = 1 in die obige Gleichung setzen, können wir die obige Gleichung erweitern -
$\lim_{k \to \infty}{[x(1)-x(0)+x(6)-x(1)+x(3)-x(2)+...\quad...\quad...+x(x+1)-x(k)]}$
Dies kann wie folgt formuliert werden:
$X(\infty) = \lim_{n \to \infty}X(n) = \lim_{z \to 1}[X(Z)(1-Z^{-1})]$(Daher bewiesen)
Beispiel
Finden wir den Anfangs- und Endwert von x (n), dessen Signal gegeben ist durch
$X(Z) = 2+3Z^{-1}+4Z^{-2}$
Solution - Finden wir zuerst den Anfangswert des Signals, indem wir den Satz anwenden
$x(0) = \lim_{z \to \infty}X(Z)$
$= \lim_{z \to \infty}[2+3Z^{-1}+4Z^{-2}]$
$= 2+(\frac{3}{\infty})+(\frac{4}{\infty}) = 2$
Lassen Sie uns nun den Endwert des Signals finden, das den Satz anwendet
$x(\infty) = \lim_{z \to \infty}[(1-Z^{-1})X(Z)]$
$= \lim_{z \to \infty}[(1-Z^{-1})(2+3Z^{-1}+4Z^{-2})]$
$= \lim_{z \to \infty}[2+Z^{-1}+Z^{-2}-4Z^{-3}]$
$= 2+1+1-4 = 0$
Some other properties of Z-transform are listed below - -
Differenzierung in der Frequenz
Es gibt die Änderung der Z-Domäne des Signals an, wenn sein diskretes Signal in Bezug auf die Zeit differenziert wird.
$nx(n)\longleftrightarrow -Z\frac{dX(z)}{dz}$
Sein ROC kann geschrieben werden als;
$r_2< Mod(Z)< r_1$
Beispiel
Finden wir den Wert von x (n) durch Differenzierung in der Frequenz, deren diskretes Signal in der Z-Domäne gegeben ist durch $x(n)\longleftrightarrow X(Z) = log(1+aZ^{-1})$
Durch Eigenschaft können wir das schreiben
$nx(n)\longleftrightarrow -Z\frac{dx(Z)}{dz}$
$= -Z[\frac{-aZ^{-2}}{1+aZ^{-1}}]$
$= (aZ^{-1})/(1+aZ^{-1})$
$= 1-1/(1+aZ^{-1})$
$nx(n) = \delta(n)-(-a)^nu(n)$
$\Rightarrow x(n) = 1/n[\delta(n)-(-a)^nu(n)]$
Multiplikation in der Zeit
Es gibt die Änderung der Z-Domäne des Signals an, wenn die Multiplikation auf einem diskreten Signalpegel stattfindet.
$x_1(n).x_2(n)\longleftrightarrow(\frac{1}{2\Pi j})[X1(Z)*X2(Z)]$
Konjugation in der Zeit
Dies zeigt die Darstellung des konjugierten diskreten Signals in der Z-Domäne.
$X^*(n)\longleftrightarrow X^*(Z^*)$
Ein System mit Systemfunktion kann nur stabil sein, wenn alle Pole innerhalb des Einheitskreises liegen. Zunächst prüfen wir, ob das System kausal ist oder nicht. Wenn das System kausal ist, gehen wir zur Bestimmung der BIBO-Stabilität. Dabei bezieht sich die BIBO-Stabilität auf die begrenzte Eingabe für die begrenzte Ausgabebedingung.
Dies kann geschrieben werden als;
$Mod(X(Z))< \infty$
$= Mod(\sum x(n)Z^{-n})< \infty$
$= \sum Mod(x(n)Z^{-n})< \infty$
$= \sum Mod[x(n)(re^{jw})^{-n}]< 0$
$= \sum Mod[x(n)r^{-n}]Mod[e^{-jwn}]< \infty$
$= \sum_{n = -\infty}^\infty Mod[x(n)r^{-n}]< \infty$
Die obige Gleichung zeigt die Bedingung für die Existenz der Z-Transformation.
Die Bedingung für das Vorhandensein eines DTFT-Signals ist jedoch
$$\sum_{n = -\infty}^\infty Mod(x(n)< \infty$$Beispiel 1
Versuchen wir, die Z-Transformation des Signals herauszufinden, die als gegeben ist
$x(n) = -(-0.5)^{-n}u(-n)+3^nu(n)$
$= -(-2)^nu(n)+3^nu(n)$
Solution - Hier für $-(-2)^nu(n)$ Der ROC ist linksseitig und Z <2
Zum $3^nu(n)$ ROC ist rechtsseitig und Z> 3
Daher wird hier keine Z-Transformation des Signals existieren, da es keinen gemeinsamen Bereich gibt.
Beispiel 2
Versuchen wir, die Z-Transformation des Signals von herauszufinden
$x(n) = -2^nu(-n-1)+(0.5)^nu(n)$
Solution - Hier für $-2^nu(-n-1)$ Der ROC des Signals ist linksseitig und Z <2
Für Signal $(0.5)^nu(n)$ ROC ist rechtsseitig und Z> 0,5
Der gemeinsame ROC wird also als 0,5 <Z <2 gebildet
Daher kann die Z-Transformation wie folgt geschrieben werden:
$X(Z) = \lbrace\frac{1}{1-2Z^{-1}}\rbrace+\lbrace\frac{1}{(1-0.5Z)^{-1}}\rbrace$
Beispiel 3
Versuchen wir, die Z-Transformation des Signals herauszufinden, die als gegeben ist $x(n) = 2^{r(n)}$
Solution- r (n) ist das Rampensignal. Das Signal kann also wie folgt geschrieben werden:
$x(n) = 2^{nu(n)}\lbrace 1, n<0 (u(n)=0)\quad and\quad2^n, n\geq 0(u(n) = 1)\rbrace$
$= u(-n-1)+2^nu(n)$
Hier für das Signal $u(-n-1)$ und ROC Z <1 und für $2^nu(n)$ mit ROC ist Z> 2.
Eine Z-Transformation des Signals wird also nicht existieren.
Z-Transformation für das Kausalsystem
Das Kausalsystem kann definiert werden als $h(n) = 0,n<0$. Für das Kausalsystem liegt der ROC außerhalb des Kreises in der Z-Ebene.
$H(Z) = \displaystyle\sum\limits_{n = 0}^{\infty}h(n)Z^{-n}$
Erweitern der obigen Gleichung,
$H(Z) = h(0)+h(1)Z^{-1}+h(2)Z^{-2}+...\quad...\quad...$
$= N(Z)/D(Z)$
Für Kausalsysteme enthält die Erweiterung der Übertragungsfunktion keine positiven Potenzen von Z. Für das Kausalsystem darf die Reihenfolge des Zählers die Reihenfolge des Nenners nicht überschreiten. Dies kann geschrieben werden als-
$\lim_{z \rightarrow \infty}H(Z) = h(0) = 0\quad or\quad Finite$
Um die Stabilität des Kausalsystems zu gewährleisten, sollten sich die Pole der Übertragungsfunktion innerhalb des Einheitskreises in der Z-Ebene befinden.
Z-Transformation für das Anti-Kausal-System
Das kausale System kann definiert werden als $h(n) = 0, n\geq 0$. Für das Anti-Kausal-System sollten die Pole der Übertragungsfunktion außerhalb des Einheitskreises in der Z-Ebene liegen. Für ein antikausales System befindet sich der ROC innerhalb des Kreises in der Z-Ebene.
Wenn wir ein System, das bereits im Frequenzbereich dargestellt ist, als diskretes Zeitsignal analysieren wollen, dann entscheiden wir uns für die inverse Z-Transformation.
Mathematisch kann es dargestellt werden als;
$$x(n) = Z^{-1}X(Z)$$Dabei ist x (n) das Signal im Zeitbereich und X (Z) das Signal im Frequenzbereich.
Wenn wir die obige Gleichung im Integralformat darstellen wollen, können wir sie als schreiben
$$x(n) = (\frac{1}{2\Pi j})\oint X(Z)Z^{-1}dz$$Hier befindet sich das Integral über einem geschlossenen Pfad C. Dieser Pfad befindet sich innerhalb des ROC von x (z) und enthält den Ursprung.
Methoden zum Finden der inversen Z-Transformation
Wenn die Analyse im diskreten Format benötigt wird, konvertieren wir das Frequenzbereichssignal durch inverse Z-Transformation zurück in das diskrete Format. Wir folgen den folgenden vier Möglichkeiten, um die inverse Z-Transformation zu bestimmen.
- Lange Teilungsmethode
- Teilfraktionsexpansionsmethode
- Rest- oder Konturintegralmethode
Lange Teilungsmethode
Bei diesem Verfahren kann die Z-Transformation des Signals x (z) als das Verhältnis des Polynoms dargestellt werden, wie nachstehend gezeigt;
$$x(z)=N(Z)/D(Z)$$Wenn wir nun den Zähler durch den Nenner teilen, erhalten wir eine Reihe wie unten gezeigt
$$X(z) = x(0)+x(1)Z^{-1}+x(2)Z^{-2}+...\quad...\quad...$$Die obige Sequenz repräsentiert die Reihe der inversen Z-Transformation des gegebenen Signals (für n ≥ 0) und das obige System ist kausal.
Für n <0 kann die Reihe jedoch wie folgt geschrieben werden:
$$x(z) = x(-1)Z^1+x(-2)Z^2+x(-3)Z^3+...\quad...\quad...$$Teilfraktionsexpansionsmethode
Auch hier wird das Signal zuerst in N (z) / D (z) -Form ausgedrückt.
Wenn es sich um einen rationalen Bruch handelt, wird er wie folgt dargestellt:
$x(z) = b_0+b_1Z^{-1}+b_2Z^{-2}+...\quad...\quad...+b_mZ^{-m})/(a_0+a_1Z^{-1}+a_2Z^{-2}+...\quad...\quad...+a_nZ^{-N})$
Das obige ist unpassend, wenn m <n und an ≠ 0 sind
Wenn das Verhältnis nicht richtig ist (dh nicht korrekt), müssen wir es in die richtige Form konvertieren, um es zu lösen.
Integralmethode für Rückstände oder Konturen
Bei dieser Methode erhalten wir die inverse Z-Transformation x (n) durch Summieren der Reste von $[x(z)Z^{n-1}]$an allen Polen. Mathematisch kann dies ausgedrückt werden als
$$x(n) = \displaystyle\sum\limits_{all\quad poles\quad X(z)}residues\quad of[x(z)Z^{n-1}]$$Hier ist der Rückstand für jeden Pol der Ordnung m at $z = \beta$ ist
$$Residues = \frac{1}{(m-1)!}\lim_{Z \rightarrow \beta}\lbrace \frac{d^{m-1}}{dZ^{m-1}}\lbrace (z-\beta)^mX(z)Z^{n-1}\rbrace$$Beispiel 1
Finden Sie die Antwort des Systems $s(n+2)-3s(n+1)+2s(n) = \delta (n)$, wenn alle Anfangsbedingungen Null sind.
Solution - Wenn wir die Z-Transformation auf beiden Seiten der obigen Gleichung nehmen, erhalten wir
$$S(z)Z^2-3S(z)Z^1+2S(z) = 1$$$\Rightarrow S(z)\lbrace Z^2-3Z+2\rbrace = 1$
$\Rightarrow S(z) = \frac{1}{\lbrace z^2-3z+2\rbrace}=\frac{1}{(z-2)(z-1)} = \frac{\alpha _1}{z-2}+\frac{\alpha _2}{z-1}$
$\Rightarrow S(z) = \frac{1}{z-2}-\frac{1}{z-1}$
Nehmen wir die inverse Z-Transformation der obigen Gleichung
$S(n) = Z^{-1}[\frac{1}{Z-2}]-Z^{-1}[\frac{1}{Z-1}]$
$= 2^{n-1}-1^{n-1} = -1+2^{n-1}$
Beispiel 2
Finden Sie die Systemfunktion H (z) und die Einheitsprobenantwort h (n) des Systems, dessen Differenzgleichung wie unter beschrieben ist
$y(n) = \frac{1}{2}y(n-1)+2x(n)$
wobei y (n) und x (n) die Ausgabe bzw. Eingabe des Systems sind.
Solution - Nehmen wir die Z-Transformation der obigen Differenzgleichung
$y(z) = \frac{1}{2}Z^{-1}Y(Z)+2X(z)$
$= Y(Z)[1-\frac{1}{2}Z^{-1}] = 2X(Z)$
$= H(Z) = \frac{Y(Z)}{X(Z)} = \frac{2}{[1-\frac{1}{2}Z^{-1}]}$
Dieses System hat eine Stange an $Z = \frac{1}{2}$ und $Z = 0$ und $H(Z) = \frac{2}{[1-\frac{1}{2}Z^{-1}]}$
Wenn wir also die inverse Z-Transformation des Obigen nehmen, erhalten wir
$h(n) = 2(\frac{1}{2})^nU(n)$
Beispiel 3
Bestimmen Sie Y (z), n≥0 im folgenden Fall -
$y(n)+\frac{1}{2}y(n-1)-\frac{1}{4}y(n-2) = 0\quad given\quad y(-1) = y(-2) = 1$
Solution - Wenn wir die Z-Transformation auf die obige Gleichung anwenden, erhalten wir
$Y(Z)+\frac{1}{2}[Z^{-1}Y(Z)+Y(-1)]-\frac{1}{4}[Z^{-2}Y(Z)+Z^{-1}Y(-1)+4(-2)] = 0$
$\Rightarrow Y(Z)+\frac{1}{2Z}Y(Z)+\frac{1}{2}-\frac{1}{4Z^2}Y(Z)-\frac{1}{4Z}-\frac{1}{4} = 0$
$\Rightarrow Y(Z)[1+\frac{1}{2Z}-\frac{1}{4Z^2}] =\frac{1}{4Z}-\frac{1}{2}$
$\Rightarrow Y(Z)[\frac{4Z^2+2Z-1}{4Z^2}] = \frac{1-2Z}{4Z}$
$\Rightarrow Y(Z) = \frac{Z(1-2Z)}{4Z^2+2Z-1}$
Wie die Fourier-Transformation des kontinuierlichen Zeitsignals kann die Fourier-Transformation mit diskreter Zeit verwendet werden, um eine diskrete Sequenz in ihre äquivalente Frequenzdomänendarstellung und das diskrete LTI-Zeitsystem darzustellen und verschiedene Berechnungsalgorithmen zu entwickeln.
X (jω) in stetiger FT ist eine stetige Funktion von x (n). DFT befasst sich jedoch mit der Darstellung von x (n) mit Abtastwerten seines Spektrums X (ω). Daher ist dieses mathematische Werkzeug für die bequeme Darstellung rechnerisch von großer Bedeutung. Mit diesem Tool können sowohl periodische als auch nichtperiodische Sequenzen verarbeitet werden. Die periodischen Sequenzen müssen abgetastet werden, indem die Periode bis unendlich verlängert wird.
Frequenzbereichsabtastung
Aus der Einleitung geht hervor, dass wir wissen müssen, wie die Frequenzbereichsabtastung, dh die Abtastung X (ω), durchzuführen ist. Daher wird die Beziehung zwischen der abgetasteten Fourier-Transformation und der DFT auf folgende Weise hergestellt.
In ähnlicher Weise können periodische Sequenzen zu diesem Werkzeug passen, indem die Periode N bis unendlich verlängert wird.
Sei eine nichtperiodische Folge, $X(n) = \lim_{N \to \infty}x_N(n)$
Definieren seiner Fourier-Transformation,
$X(\omega ) = \sum_{n=-\infty}^\infty x(n)e^{-jwn}X(K\delta \omega)$
Hier wird X (ω) periodisch in jedem δω-Bogenmaßintervall abgetastet.
Da X (ω) im 2π-Bogenmaß periodisch ist, benötigen wir Abtastwerte nur im Grundbereich. Die Proben werden nach äquidistanten Intervallen im Frequenzbereich 0 ≤ ω ≤ 2π entnommen. Der Abstand zwischen äquivalenten Intervallen beträgt$\delta \omega = \frac{2\pi }{N}k$ Bogenmaß.
Jetzt auswerten, $\omega = \frac{2\pi}{N}k$
$X(\frac{2\pi}{N}k) = \sum_{n = -\infty}^\infty x(n)e^{-j2\pi nk/N},$ ... Gleichung (2)
wo k = 0,1, …… N-1
Nachdem Sie das Obige unterteilt und die Reihenfolge der Summierung vertauscht haben
$X(\frac{2\pi}{N}k) = \displaystyle\sum\limits_{n = 0}^{N-1}[\displaystyle\sum\limits_{l = -\infty}^\infty x(n-Nl)]e^{-j2\pi nk/N}$ ... Gleichung (3)
$\sum_{l=-\infty}^\infty x(n-Nl) = x_p(n) = a\quad periodic\quad function\quad of\quad period\quad N\quad and\quad its\quad fourier\quad series\quad = \sum_{k = 0}^{N-1}C_ke^{j2\pi nk/N}$
wobei n = 0,1, ..., N-1; 'p'- steht für periodische Entität oder Funktion
Die Fourier-Koeffizienten sind:
$C_k = \frac{1}{N}\sum_{n = 0}^{N-1}x_p(n)e^{-j2\pi nk/N}$k = 0,1, ..., N-1 ... Gleichung (4)
Wenn wir die Gleichungen 3 und 4 vergleichen, erhalten wir;
$NC_k = X(\frac{2\pi}{N}k)$k = 0,1, ..., N-1 ... Gleichung (5)
$NC_k = X(\frac{2\pi}{N}k) = X(e^{jw}) = \displaystyle\sum\limits_{n = -\infty}^\infty x_p(n)e^{-j2\pi nk/N}$... Gleichung (6)
Aus der Fourier-Reihenerweiterung
$x_p(n) = \frac{1}{N}\displaystyle\sum\limits_{k = 0}^{N-1}NC_ke^{j2\pi nk/N} = \frac{1}{N}\sum_{k = 0}^{N-1}X(\frac{2\pi}{N}k)e^{j2\pi nk/N}$... Gleichung (7)
Wobei n = 0,1,…, N-1
Hier haben wir das periodische Signal von X (ω) erhalten. $x(n)$ kann extrahiert werden aus $x_p(n)$ Nur wenn im Zeitbereich kein Aliasing vorhanden ist. $N\geq L$
N = Zeitraum von $x_p(n)$ L = Zeitraum von $x(n)$
$x(n) = \begin{cases}x_p(n), & 0\leq n\leq N-1\\0, & Otherwise\end{cases}$
Das Mapping wird auf diese Weise erreicht.
Eigenschaften von DFT
Linearität
Es besagt, dass die DFT einer Kombination von Signalen gleich der Summe der DFT einzelner Signale ist. Nehmen wir zwei Signale x 1 (n) und x 2 (n), deren DFTs X 1 (ω) bzw. X 2 (ω) sind. Also, wenn
$x_1(n)\rightarrow X_1(\omega)$und$x_2(n)\rightarrow X_2(\omega)$
Dann $ax_1(n)+bx_2(n)\rightarrow aX_1(\omega)+bX_2(\omega)$
wo a und b sind Konstanten.
Symmetrie
Die Symmetrieeigenschaften von DFT können auf ähnliche Weise abgeleitet werden wie die DTFT-Symmetrieeigenschaften. Wir wissen, dass die DFT der Sequenz x (n) mit X (K) bezeichnet wird. Wenn nun x (n) und X (K) komplexwertige Sequenzen sind, kann sie wie folgt dargestellt werden
$x(n) = x_R(n)+jx_1(n),0\leq n\leq N-1$
Und $X(K) = X_R(K)+jX_1(K),0\leq K\leq N-1$
Dualitätseigenschaft
Betrachten wir ein Signal x (n), dessen DFT als X (K) angegeben ist. Die endliche Dauer sei X (N). Dann nach dem Dualitätssatz,
Wenn, $x(n)\longleftrightarrow X(K)$
Dann, $X(N)\longleftrightarrow Nx[((-k))_N]$
Wenn wir also diesen Satz verwenden, wenn wir DFT kennen, können wir leicht die endliche Dauerfolge finden.
Komplexe Konjugateigenschaften
Angenommen, es gibt ein Signal x (n), dessen DFT uns auch als X (K) bekannt ist. Wenn nun das komplexe Konjugat des Signals als x * (n) angegeben wird, können wir die DFT leicht finden, ohne viel zu berechnen, indem wir den unten gezeigten Satz verwenden.
Wenn, $x(n)\longleftrightarrow X(K)$
Dann, $x*(n)\longleftrightarrow X*((K))_N = X*(N-K)$
Kreisfrequenzverschiebung
Die Multiplikation der Folge x (n) mit der komplexen Exponentialfolge $e^{j2\Pi kn/N}$entspricht der Kreisverschiebung der DFT um L Frequenzeinheiten. Dies ist die Eigenschaft der doppelten zur zirkulären Zeitverschiebung.
Wenn, $x(n)\longleftrightarrow X(K)$
Dann, $x(n)e^{j2\Pi Kn/N}\longleftrightarrow X((K-L))_N$
Multiplikation von zwei Sequenzen
Wenn es zwei Signale x 1 (n) und x 2 (n) gibt und ihre jeweiligen DFTs X 1 (k) und X 2 (K) sind, entspricht die Multiplikation von Signalen in zeitlicher Reihenfolge einer zirkulären Faltung ihrer DFTs.
Wenn, $x_1(n)\longleftrightarrow X_1(K)\quad\&\quad x_2(n)\longleftrightarrow X_2(K)$
Dann, $x_1(n)\times x_2(n)\longleftrightarrow X_1(K)© X_2(K)$
Satz von Parseval
Für komplexwertige Sequenzen x (n) und y (n) im Allgemeinen
Wenn, $x(n)\longleftrightarrow X(K)\quad \&\quad y(n)\longleftrightarrow Y(K)$
Dann, $\sum_{n = 0}^{N-1}x(n)y^*(n) = \frac{1}{N}\sum_{k = 0}^{N-1}X(K)Y^*(K)$
Wir wissen das wann $\omega = 2\pi K/N$ und $N\rightarrow \infty,\omega$ wird eine stetige Variable und begrenzt die Summation $-\infty$ zu $+\infty$.
Deshalb,
$$NC_k = X(\frac{2\pi}{N}k) = X(e^{j\omega}) = \displaystyle\sum\limits_{n = -\infty}^\infty x(n)e^{\frac{-j2\pi nk}{N}} = \displaystyle\sum\limits_{n = -\infty}^\infty x(n)e^{-j\omega n}$$Diskrete Zeit-Fourier-Transformation (DTFT)
Wir wissen das, $X(e^{j\omega}) = \sum_{n = -\infty}^\infty x(n)e^{-j\omega n}$
Wo, $X(e^{j\omega})$ist kontinuierlich und periodisch in ω und mit der Periode 2π. … Gleichung (1)
Jetzt,
$x_p(n) = \sum_{k = 0}^{N-1}NC_ke^{j2 \pi nk/N}$ … Aus der Fourier-Reihe
$x_p(n) = \frac{1}{2\pi}\sum_{k=0}^{N-1}NC_ke^{j2\pi nk/N}\times \frac{2\pi}{N}$
ω wird stetig und $\frac{2\pi}{N}\rightarrow d\omega$aus den oben genannten Gründen.
$x(n) = \frac{1}{2\pi}\int_{n = 0}^{2\pi}X(e^{j\omega})e^{j\omega n}d\omega$… Gleichung (2)
Inverse diskrete Zeit-Fourier-Transformation
Symbolisch
$x(n)\Longleftrightarrow x(e^{j\omega})$(Das Fourier-Transformationspaar)
Die notwendige und ausreichende Bedingung für die Existenz einer diskreten Zeit-Fourier-Transformation für eine nichtperiodische Sequenz x (n) ist absolut summierbar.
dh$\sum_{n = -\infty}^\infty|x(n)|<\infty$
Eigenschaften von DTFT
Linearity :: $a_1x_1(n)+a_2x_2(n)\Leftrightarrow a_1X_1(e^{j\omega})+a_2X_2(e^{j\omega})$
Time shifting - - $x(n-k)\Leftrightarrow e^{-j\omega k}.X(e^{j\omega})$
Time Reversal - - $x(-n)\Leftrightarrow X(e^{-j\omega})$
Frequency shifting - - $e^{j\omega _0n}x(n)\Leftrightarrow X(e^{j(\omega -\omega _0)})$
Differentiation frequency domain - - $nx(n) = j\frac{d}{d\omega}X(e^{j\omega})$
Convolution - - $x_1(n)*x_2(n)\Leftrightarrow X_1(e^{j\omega})\times X_2(e^{j\omega})$
Multiplication - - $x_1(n)\times x_2(n)\Leftrightarrow X_1(e^{j\omega})*X_2(e^{j\omega})$
Co-relation - - $y_{x_1\times x_2}(l)\Leftrightarrow X_1(e^{j\omega})\times X_2(e^{j\omega})$
Modulation theorem - - $x(n)\cos \omega _0n = \frac{1}{2}[X_1(e^{j(\omega +\omega _0})*X_2(e^{jw})$
Symmetry - -$x^*(n)\Leftrightarrow X^*(e^{-j\omega})$ ;;
$x^*(-n)\Leftrightarrow X^*(e^{j\omega})$ ;;
$Real[x(n)]\Leftrightarrow X_{even}(e^{j\omega})$ ;;
$Imag[x(n)]\Leftrightarrow X_{odd}(e^{j\omega})$ ;;
$x_{even}(n)\Leftrightarrow Real[x(e^{j\omega})]$ ;;
$x_{odd}(n)\Leftrightarrow Imag[x(e^{j\omega})]$ ;;
Parseval’s theorem - - $\sum_{-\infty}^\infty|x_1(n)|^2 = \frac{1}{2\pi}\int_{-\pi}^{\pi}|X_1(e^{j\omega})|^2d\omega$
Zuvor haben wir die Abtastung im Frequenzbereich untersucht. Mit diesem Grundwissen probieren wir$X(e^{j\omega})$im Frequenzbereich, so dass aus diesen abgetasteten Daten eine bequeme digitale Analyse durchgeführt werden kann. Daher wird DFT sowohl im Zeit- als auch im Frequenzbereich abgetastet. Mit der Annahme$x(n) = x_p(n)$
Daher ist DFT gegeben durch -
$X(k) = DFT[x(n)] = X(\frac{2\pi}{N}k) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)e^{-\frac{j2\pi nk}{N}}$, k = 0,1,…., N - 1 … Gleichung (3)
Und IDFT ist gegeben durch -
$X(n) = IDFT[X(k)] = \frac{1}{N}\sum_{k = 0}^{N-1}X(k)e^{\frac{j2\pi nk}{N}}$, n = 0,1,…., N - 1 … Gleichung (4)
$\therefore x(n)\Leftrightarrow X(k)$
Twiddle-Faktor
Es wird bezeichnet als $W_N$ und definiert als $W_N = e^{-j2\pi /N}$. Seine Größe wird immer auf Einheit gehalten. Phase von$W_N = -2\pi /N$. Es ist ein Vektor auf einem Einheitskreis und wird zur Vereinfachung der Berechnung verwendet. Mathematisch kann es gezeigt werden als -
$W_N^r = W_N^{r\pm N} = W_N^{r\pm 2N} = ...$
Es ist eine Funktion von r und Periode N.
Betrachten Sie N = 8, r = 0,1,2,3,… .14,15,16,….
$\Longleftrightarrow W_8^0 = W_8^8 = W_8^{16} = ... = ... = W_8^{32} = ... =1= 1\angle 0$
$W_8^1 = W_8^9 = W_8^{17} = ... = ... = W_8^{33} = ... =\frac{1}{\sqrt 2}= j\frac{1}{\sqrt 2} = 1\angle-\frac{\pi}{4}$
Lineare Transformation
Lassen Sie uns die lineare Transformation verstehen -
Wir wissen das,
$DFT(k) = DFT[x(n)] = X(\frac{2\pi}{N}k) = \sum_{n = 0}^{N-1}x(n).W_n^{-nk};\quad k = 0,1,….,N−1$
$x(n) = IDFT[X(k)] = \frac{1}{N}\sum_{k = 0}^{N-1}X(k).W_N^{-nk};\quad n = 0,1,….,N−1$
Note- Die Berechnung der DFT kann mit N 2 -Komplexmultiplikation und N (N-1) -Komplexaddition durchgeführt werden.
$x_N = \begin{bmatrix}x(0)\\x(1)\\.\\.\\x(N-1) \end{bmatrix}\quad N\quad point\quad vector\quad of\quad signal\quad x_N$
$X_N = \begin{bmatrix}X(0)\\X(1)\\.\\.\\X(N-1) \end{bmatrix}\quad N\quad point\quad vector\quad of\quad signal\quad X_N$
$\begin{bmatrix}1 & 1 & 1 & ... & ... & 1\\1 & W_N & W_N^2 & ... & ... & W_N^{N-1}\\. & W_N^2 & W_N^4 & ... & ... & W_N^{2(N-1)}\\.\\1 & W_N^{N-1} & W_N^{2(N-1)} & ... & ... & W_N^{(N-1)(N-1)} \end{bmatrix}$
N - Punkt DFT im Matrixterm ist gegeben durch - $X_N = W_Nx_N$
$W_N\longmapsto$ Matrix der linearen Transformation
$Now,\quad x_N = W_N^{-1}X_N$
IDFT in Matrixform ist gegeben durch
$$x_N = \frac{1}{N}W_N^*X_N$$Vergleich der beiden Ausdrücke von $x_N,\quad W_N^{-1} = \frac{1}{N}W_N^*$ und $W_N\times W_N^* = N[I]_{N\times N}$
Deshalb, $W_N$ ist eine lineare Transformationsmatrix, eine orthogonale (einheitliche) Matrix.
Aus periodischem Eigentum von $W_N$ und aus seiner symmetrischen Eigenschaft kann geschlossen werden, dass $W_N^{k+N/2} = -W_N^k$
Kreissymmetrie
Die N-Punkt-DFT einer endlichen Dauer x (n) der Länge N ≤ L entspricht der N-Punkt-DFT der periodischen Ausdehnung von x (n), d. H. $x_p(n)$ der Periode N. und $x_p(n) = \sum_{l = -\infty}^\infty x(n-Nl)$. Wenn wir nun die Sequenz, die eine periodische Sequenz ist, um k Einheiten nach rechts verschieben, wird eine andere periodische Sequenz erhalten. Dies ist als Kreisverschiebung bekannt und dies ist gegeben durch:
$$x_p^\prime (n) = x_p(n-k) = \sum_{l = -\infty}^\infty x(n-k-Nl)$$Die neue endliche Folge kann dargestellt werden als
$$x_p^\prime (n) = \begin{cases}x_p^\prime(n), & 0\leq n\leq N-1\\0 & Otherwise\end{cases}$$Example - Sei x (n) = {1,2,4,3}, N = 4,
$x_p^\prime (n) = x(n-k,modulo\quad N)\equiv x((n-k))_N\quad;ex-if\quad k=2i.e\quad 2\quad unit\quad right\quad shift\quad and\quad N = 4,$
Angenommene Richtung im Uhrzeigersinn als positive Richtung.
Wir haben, $x\prime(n) = x((n-2))_4$
$x\prime(0) = x((-2))_4 = x(2) = 4$
$x\prime(1) = x((-1))_4 = x(3) = 3$
$x\prime(2) = x((-2))_4 = x(0) = 1$
$x\prime(3) = x((1))_4 = x(1) = 2$
Conclusion - Die Kreisverschiebung der N-Punkt-Sequenz entspricht einer linearen Verschiebung ihrer periodischen Ausdehnung und umgekehrt.
Kreisförmig gleichmäßige Reihenfolge - $x(N-n) = x(n),\quad 1\leq n\leq N-1$
$i.e.x_p(n) = x_p(-n) = x_p(N-n)$
Konjugieren Sie sogar -$x_p(n) = x_p^*(N-n)$
Kreisförmig ungerade Reihenfolge - $x(N-n) = -x(n),\quad 1\leq n\leq N-1$
$i.e.x_p(n) = -x_p(-n) = -x_p(N-n)$
Ungerade konjugieren - $x_p(n) = -x_p^*(N-n)$
Jetzt, $x_p(n) = x_{pe}+x_{po}(n)$, wo,
$x_{pe}(n) = \frac{1}{2}[x_p(n)+x_p^*(N-n)]$
$x_{po}(n) = \frac{1}{2}[x_p(n)-x_p^*(N-n)]$
Für jedes reale Signal x (n) gilt$X(k) = X^*(N-k)$
$X_R(k) = X_R(N-k)$
$X_l(k) = -X_l(N-k)$
$\angle X(k) = -\angle X(N-K)$
Time reversal- Probe über die 0 Umkehren ten Probe. Dies ist gegeben als;
$x((-n))_N = x(N-n),\quad 0\leq n\leq N-1$
Die Zeitumkehrung zeichnet Sequenzproben im Uhrzeigersinn, dh in der angenommenen negativen Richtung.
Einige andere wichtige Eigenschaften
Andere wichtige IDFT-Eigenschaften $x(n)\longleftrightarrow X(k)$
Time reversal - - $x((-n))_N = x(N-n)\longleftrightarrow X((-k))_N = X(N-k)$
Circular time shift - - $x((n-l))_N \longleftrightarrow X(k)e^{j2\pi lk/N}$
Circular frequency shift - - $x(n)e^{j2\pi ln/N} \longleftrightarrow X((k-l))_N$
Complex conjugate properties - -
$x^*(n)\longleftrightarrow X^*((-k))_N = X^*(N-k)\quad and$
$x^*((-n))_N = x^*(N-n)\longleftrightarrow X^*(-k)$
Multiplication of two sequence - -
$x_1(n)\longleftrightarrow X_1(k)\quad and\quad x_2(n)\longleftrightarrow X_2(k)$
$\therefore x_1(n)x_2(n)\longleftrightarrow X_1(k)\quadⓃ X_2(k)$
Circular convolution - und Multiplikation von zwei DFT
$x_1(k)\quad Ⓝ x_2(k) =\sum_{k = 0}^{N-1}x_1(n).x_2((m-n))_n,\quad m = 0,1,2,... .,N-1 $
$x_1(k)\quad Ⓝ x_2(k)\longleftrightarrow X_1(k).X_2(k)$
Circular correlation - Wenn $x(n)\longleftrightarrow X(k)$ und $y(n)\longleftrightarrow Y(k)$ dann existiert eine Kreuzkorrelationssequenz, die als bezeichnet wird $\bar Y_{xy}$ so dass $\bar Y_{xy}(l) = \sum_{n = 0}^{N-1}x(n)y^*((n-l))_N = X(k).Y^*(k)$
Parseval’s Theorem - Wenn $x(n)\longleftrightarrow X(k)$ und $y(n)\longleftrightarrow Y(k)$;;
$\displaystyle\sum\limits_{n = 0}^{N-1}x(n)y^*(n) = \frac{1}{N}\displaystyle\sum\limits_{n =0}^{N-1}X(k).Y^*(k)$
Nehmen wir zwei Sequenzen endlicher Dauer x 1 (n) und x 2 (n) mit einer ganzzahligen Länge als N. Ihre DFTs sind X 1 (K) bzw. X 2 (K), was unten gezeigt wird -
$$X_1(K) = \sum_{n = 0}^{N-1}x_1(n)e^{\frac{j2\Pi kn}{N}}\quad k = 0,1,2...N-1$$ $$X_2(K) = \sum_{n = 0}^{N-1}x_2(n)e^{\frac{j2\Pi kn}{N}}\quad k = 0,1,2...N-1$$Nun werden wir versuchen, die DFT einer anderen Sequenz x 3 (n) zu finden, die als X 3 (K) angegeben ist.
$X_3(K) = X_1(K)\times X_2(K)$
Wenn wir die IDFT der oben genannten nehmen, erhalten wir
$x_3(n) = \frac{1}{N}\displaystyle\sum\limits_{n = 0}^{N-1}X_3(K)e^{\frac{j2\Pi kn}{N}}$
Nachdem wir die obige Gleichung gelöst haben, erhalten wir schließlich
$x_3(n) = \displaystyle\sum\limits_{m = 0}^{N-1}x_1(m)x_2[((n-m))_N]\quad m = 0,1,2...N-1$
| Vergleichspunkte | Lineare Faltung | Kreisfaltung |
|---|---|---|
| Verschiebung | Lineares Schalten | Kreisverschiebung |
| Proben im Faltungsergebnis | $N_1+N_2−1$ | $Max(N_1,N_2)$ |
| Antwort eines Filters finden | Möglich | Möglich ohne Polsterung |
Methoden der Kreisfaltung
Im Allgemeinen gibt es zwei Methoden, die angewendet werden, um eine kreisförmige Faltung durchzuführen, und sie sind:
- Konzentrische Kreismethode,
- Matrixmultiplikationsmethode.
Konzentrische Kreismethode
Lassen $x_1(n)$ und $x_2(n)$seien zwei gegebene Sequenzen. Die Schritte folgten für die kreisförmige Faltung von$x_1(n)$ und $x_2(n)$ sind
Nehmen Sie zwei konzentrische Kreise. Plot N Proben von$x_1(n)$ auf dem Umfang des äußeren Kreises (bei gleichem Abstand aufeinanderfolgender Punkte) gegen den Uhrzeigersinn.
Zum Plotten $x_2(n)$Zeichnen Sie N Proben von $x_2(n)$in Uhrzeigerrichtung auf dem inneren Kreis, Ausgangsprobe an der gleichen Stelle wie 0 gesetzt th Probe von$x_1(n)$
Multiplizieren Sie die entsprechenden Samples auf den beiden Kreisen und fügen Sie sie hinzu, um die Ausgabe zu erhalten.
Drehen Sie den inneren Kreis mit jeweils einer Probe gegen den Uhrzeigersinn.
Matrix-Multiplikationsmethode
Die Matrixmethode repräsentiert die beiden angegebenen Sequenzen $x_1(n)$ und $x_2(n)$ in Matrixform.
Eine der gegebenen Sequenzen wird durch kreisförmige Verschiebung von jeweils einer Probe wiederholt, um eine NXN-Matrix zu bilden.
Die andere Sequenz wird als Spaltenmatrix dargestellt.
Die Multiplikation zweier Matrizen ergibt das Ergebnis einer Kreisfaltung.
DFT bietet einen alternativen Ansatz zur Zeitbereichsfaltung. Es kann verwendet werden, um eine lineare Filterung im Frequenzbereich durchzuführen.
So,$Y(\omega) = X(\omega).H(\omega)\longleftrightarrow y(n)$.
Das Problem bei diesem Frequenzbereichsansatz ist das $Y(\omega)$, $X(\omega)$ und $H(\omega)$sind kontinuierliche Funktionen von ω, was für die digitale Berechnung auf Computern nicht fruchtbar ist. DFT bietet jedoch eine abgetastete Version dieser Wellenformen, um den Zweck zu lösen.
Der Vorteil besteht darin, dass mit Kenntnissen über schnellere DFT-Techniken wie FFT ein rechnerisch effizienterer Algorithmus für die Berechnung digitaler Computer im Vergleich zum Zeitbereichsansatz entwickelt werden kann.
Betrachten Sie eine endliche Dauerfolge, $[x(n) = 0,\quad for,n<0\quad and\quad n\geq L]$ (verallgemeinerte Gleichung), regt ein lineares Filter mit Impulsantwort an $[h(n) = 0,\quad forn<0\quad and\quad n\geq M]$.
$$x(n)y(n)$$ $$output = y(n) = \sum_{k = 0}^{M-1}h(k).x(n-k)$$Aus der Faltungsanalyse geht hervor, dass die Dauer von y (n) L + M - 1 ist.
Im Frequenzbereich
$$Y(\omega) = X(\omega).H(\omega)$$Jetzt, $Y(\omega)$ ist eine stetige Funktion von ω und wird mit einem Satz diskreter Frequenzen mit einer Anzahl unterschiedlicher Abtastwerte abgetastet, die gleich oder größer sein müssen $L+M-1$.
$$DFT\quad size = N\geq L+M-1$$Mit $\omega = \frac{2\pi}{N}k$,
$Y(\omega) = X(k).H(k)$, wobei k = 0,1,…., N-1
Wobei X (k) und H (k) N-Punkt-DFTs von x (n) bzw. h (n) sind. $x(n)\& h(n)$ sind mit Nullen bis zur Länge N aufgefüllt. Die kontinuierlichen Spektren werden nicht verzerrt $X(\omega)$ und $H(\omega)$. Schon seit$N\geq L+M-1$Die N-Punkt-DFT der Ausgangssequenz y (n) reicht aus, um y (n) im Frequenzbereich darzustellen, und diese Tatsachen lassen darauf schließen, dass die Multiplikation der N-Punkt-DFTs von X (k) und H (k) gefolgt von der Berechnung erfolgt der N-Punkt-IDFT muss y (n) ergeben.
Dies impliziert, dass die kreisförmige N-Punkt-Faltung von x (n) und H (n) mit Null-Auffüllung gleich der linearen Faltung von x (n) und h (n) ist.
Somit kann DFT zur linearen Filterung verwendet werden.
Caution - N sollte immer größer oder gleich sein $L+M-1$. Andernfalls würde ein Aliasing-Effekt die Ausgabesequenz beschädigen.
Angenommen, die Eingabesequenz x (n) von langer Dauer soll mit einem System mit Impulsantwort endlicher Dauer durch Falten der beiden Sequenzen verarbeitet werden. Da die über DFT durchgeführte lineare Filterung den Betrieb eines Datenblocks fester Größe umfasst, wird die Eingabesequenz vor der Verarbeitung in verschiedene Datenblöcke fester Größe unterteilt.
Die aufeinanderfolgenden Blöcke werden dann einzeln verarbeitet und die Ergebnisse werden kombiniert, um das Nettoergebnis zu erzeugen.
Da die Faltung durch Aufteilen der langen Eingabesequenz in verschiedene Abschnitte fester Größe durchgeführt wird, wird sie als geschnittene Faltung bezeichnet. Eine lange Eingabesequenz wird vor der FIR-Filterverarbeitung in Blöcke fester Größe segmentiert.
Zwei Methoden werden verwendet, um die diskrete Faltung zu bewerten -
Overlap-save method
Overlap-add method
Überlappungsspeichermethode
Overlap-Save ist der traditionelle Name für eine effiziente Methode zur Bewertung der diskreten Faltung zwischen einem sehr langen Signal x (n) und einem FIR-Filter (Finite Impulse Response) h (n). Im Folgenden sind die Schritte der Überlappungsspeichermethode aufgeführt.
Die Länge des Eingangsdatenblocks sei = N = L + M-1. Daher ist DFT- und IDFT-Länge = N. Jeder Datenblock trägt M-1 Datenpunkte des vorherigen Blocks, gefolgt von L neuen Datenpunkten, um eine Datensequenz der Länge N = L + M-1 zu bilden.
Zunächst wird für jeden Datenblock die N-Punkt-DFT berechnet.
Durch Anhängen von (L-1) Nullen wird die Impulsantwort des FIR-Filters in der Länge erhöht und die N-Punkt-DFT berechnet und gespeichert.
Multiplikation von zwei N-Punkt-DFTs H (k) und X m (k): Y ' m (k) = H (k). X m (k), wobei K = 0,1,2, ... N-1
Dann ist IDFT [Y ' m ((k)] = y' ((n) = [y ' m (0), y' m (1), y ' m (2), ....... y ' m (m-1), y' m (m), ....... y ' m (N-1)]
(hier ist N-1 = L + M-2)
Die ersten M-1-Punkte sind aufgrund von Aliasing beschädigt und werden daher verworfen, da der Datensatz die Länge N hat.
Die letzten L Punkte sind als Ergebnis der Faltung genau gleich
y ' m (n) = y m (n) wobei n = M, M + 1, ... .N-1
Um zu vermeiden , Aliasing, die letzten M-1 Elemente jeden Datensatz gespeichert werden und diese Punkte tragen sich auf den nachfolgenden Datensatz und werden 1 st M-1 - Elemente.

Das Ergebnis der IDFT, bei der erste M-1-Punkte vermieden werden, um das Aliasing aufzuheben, und die verbleibenden L-Punkte stellen das gewünschte Ergebnis als das einer linearen Faltung dar.
Überlappungsmethode hinzufügen
Im Folgenden sind die Schritte aufgeführt, um die diskrete Faltung mithilfe der Überlappungsmethode zu ermitteln.
Die Eingangsdatenblockgröße sei L. Daher ist die Größe von DFT und IDFT: N = L + M-1
Jeder Datenblock wird mit M-1 Nullen an den letzten angehängt.
Berechnen Sie die N-Punkt-DFT.
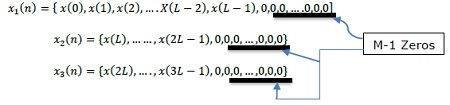
Zwei N-Punkt-DFTs werden multipliziert: Y m (k) = H (k). X m (k), wobei k = 0, 1,2, ..., N-1
IDFT [Y m (k)] erzeugt Blöcke der Länge N, die nicht durch Aliasing beeinflusst werden, da die Größe der DFT N = L + M-1 ist, und erhöht die Länge der Sequenzen an N-Punkte, indem jeweils M-1 Nullen angehängt werden Block.
Die letzten M-1-Punkte jedes Blocks müssen überlappt und zu den ersten M-1-Punkten des nachfolgenden Blocks addiert werden.
(Grund: Jeder Datenblock endet mit M-1 Nullen)
Daher ist diese Methode als Überlappungsadditionsmethode bekannt. So bekommen wir -
y (n) = {y 1 (0), y 1 (1), y 1 (2), ... .., y 1 (L-1), y 1 (L) + y 2 (0), y 1 (L + 1) + y 2 (1), ... ... .., y 1 (N-1) + y 2 (M-1), y 2 (M), ... .. . ... ... ...}
DCT (Discrete Cosine Transform) ist eine N-Eingangssequenz x (n), 0 ≤ n ≤ N-1, als lineare Transformation oder Kombination komplexer Exponentiale. Infolgedessen sind die DFT-Koeffizienten im Allgemeinen komplex, selbst wenn x (n) real ist.
Angenommen, wir versuchen, eine orthogonale Transformation mit einer N × N-Struktur herauszufinden, die eine reelle Sequenz x (n) als lineare Kombination einer Kosinussequenz ausdrückt. Das wissen wir schon -
$X(K) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)cos\frac{2\Pi kn}{N}0\leq k \leq N-1$
Und $x(n) = \frac{1}{N}\sum_{k = 0}^{N-1}x(k)cos\frac{2\Pi kn}{N}0\leq k \leq N-1$
Dies ist möglich, wenn die N-Punkt-Sequenz x (n) real und gerade ist. So,$x(n) = x(N-n),0\leq n \leq (N-1)$. Die resultierende DFT selbst ist real und gleichmäßig. Diese Dinge machen deutlich, dass wir möglicherweise eine diskrete Cosinustransformation für jede N-Punkt-Realsequenz erstellen könnten, indem wir die 2N-Punkt-DFT einer „geraden Erweiterung“ der Sequenz nehmen.
DCT wird grundsätzlich in der Bild- und Sprachverarbeitung verwendet. Es wird auch zur Komprimierung von Bildern und Sprachsignalen verwendet.
$DFT[s(n)] = S(k) = \sum_{n = 0}^{2N-1}s(n)W_{2N}^{nk},\quad where\quad 0\leq k \leq 2N-1$
$S(k) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)W_{2N}^{nk}+\displaystyle\sum\limits_{n = N}^{2N-1}x(2N-n-1)W_{2N}^{nk};\quad where\quad 0\leq k\leq 2N-1$
$\Rightarrow S(k) = W_{2N}^{-k/2}+\sum_{n = 0}^{N-1}x(n) [W_{2N}^{nk}W_{2N}^{k/2}+W_{2N}^{-nk}W_{2N}^{-k/2}];\quad where\quad 0\leq k\leq 2N-1$
$\Rightarrow S(k) = W_{2N}^{\frac{k}{2}}\sum_{n = 0}^{N-1}x(n)\cos [\frac{\pi}{N}(n+\frac{1}{2})k];\quad where\quad 0\leq k\leq 2N-1$
DCT ist definiert durch:
$V(k) = 2\sum_{n = 0}^{N-1}x(n)\cos [\frac{\pi}{2}(n+\frac{1}{2})k]\quad where\quad 0\leq k\leq N-1$
$\Rightarrow V(k) = W_{2N}^{\frac{k}{2}}S(k)\quad or\quad S(k) = W_{2N}^{\frac{k}{2}}V(k),\quad where\quad 0\leq k\leq N-1$
$\Rightarrow V(k) = 2R[W_{2N}^{\frac{k}{2}}\sum_{n = 0}^{N-1}x(n)W_{2N}^{nk}],\quad where\quad 0\leq k\leq N-1$
Beispiel 1
Überprüfen Sie den Satz von Parseval über die Sequenz $x(n) = \frac{1^n}{4}u(n)$
Solution - - $\displaystyle\sum\limits_{-\infty}^\infty|x_1(n)|^2 = \frac{1}{2\pi}\int_{-\pi}^{\pi}|X_1(e^{j\omega})|^2d\omega$
LHS $\displaystyle\sum\limits_{-\infty}^\infty|x_1(n)|^2$
$= \displaystyle\sum\limits_{-\infty}^{\infty}x(n)x^*(n)$
$= \displaystyle\sum\limits_{-\infty}^\infty(\frac{1}{4})^{2n}u(n) = \frac{1}{1-\frac{1}{16}} = \frac{16}{15}$
RHS $X(e^{j\omega}) = \frac{1}{1-\frac{1}{4}e-j\omega} = \frac{1}{1-0.25\cos \omega+j0.25\sin \omega}$
$\Longleftrightarrow X^*(e^{j\omega}) = \frac{1}{1-0.25\cos \omega-j0.25\sin \omega}$
Berechnen, $X(e^{j\omega}).X^*(e^{j\omega})$
$= \frac{1}{(1-0.25\cos \omega)^2+(0.25\sin \omega)^2} = \frac{1}{1.0625-0.5\cos \omega}$
$\frac{1}{2\pi}\int_{-\pi}^{\pi}\frac{1}{1.0625-0.5\cos \omega}d\omega$
$\frac{1}{2\pi}\int_{-\pi}^{\pi}\frac{1}{1.0625-0.5\cos \omega}d\omega = 16/15$
Wir können das sehen, LHS = RHS. (Daher bewiesen)
Beispiel 2
Berechnen Sie die N-Punkt-DFT von $x(n) = 3\delta (n)$
Solution - Das wissen wir,
$X(K) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)e^{\frac{j2\Pi kn}{N}}$
$= \displaystyle\sum\limits_{n = 0}^{N-1}3\delta(n)e^{\frac{j2\Pi kn}{N}}$
$ = 3\delta (0)\times e^0 = 1$
Damit,$x(k) = 3,0\leq k\leq N-1$… Ans.
Beispiel 3
Berechnen Sie die N-Punkt-DFT von $x(n) = 7(n-n_0)$
Solution - Das wissen wir,
$X(K) = \displaystyle\sum\limits_{n = 0}^{N-1}x(n)e^{\frac{j2\Pi kn}{N}}$
Einsetzen des Wertes von x (n),
$\displaystyle\sum\limits_{n = 0}^{N-1}7\delta (n-n_0)e^{-\frac{j2\Pi kn}{N}}$
$= e^{-kj14\Pi kn_0/N}$… Ans
In früheren DFT-Methoden haben wir gesehen, dass der rechnerische Teil zu lang ist. Das wollen wir reduzieren. Dies kann durch FFT oder schnelle Fourier-Transformation erfolgen. Wir können also sagen, dass FFT nichts anderes ist als die Berechnung einer diskreten Fourier-Transformation in einem algorithmischen Format, bei dem der rechnerische Teil reduziert wird.
Der Hauptvorteil von FFT besteht darin, dass wir dadurch die FIR-Filter entwerfen können. Mathematisch kann die FFT wie folgt geschrieben werden;
$$x[K] = \displaystyle\sum\limits_{n = 0}^{N-1}x[n]W_N^{nk}$$Nehmen wir ein Beispiel, um es besser zu verstehen. Wir haben acht Punkte berücksichtigt, nach denen benannt wurde$x_0\quad to\quad x_7$. Wir werden die geraden Begriffe in einer Gruppe und die ungeraden Begriffe in der anderen Gruppe auswählen. Eine schematische Ansicht des oben Gesagten wurde unten gezeigt -
Hier wurden die Punkte x 0 , x 2 , x 4 und x 6 in eine Kategorie eingeteilt, und in ähnlicher Weise wurden die Punkte x 1 , x 3 , x 5 und x 7 in eine andere Kategorie eingeordnet. Jetzt können wir sie weiter in einer Gruppe von zwei machen und mit der Berechnung fortfahren. Lassen Sie uns nun sehen, wie diese Aufteilung in zwei weitere bei der Berechnung hilft.
$x[k] = \displaystyle\sum\limits_{r = 0}^{\frac{N}{2}-1}x[2r]W_N^{2rk}+\displaystyle\sum\limits_{r = 0}^{\frac{N}{2}-1}x[2r+1]W_N^{(2r+1)k}$
$= \sum_{r = 0}^{\frac{N}{2}-1}x[2r]W_{N/2}^{rk}+\sum_{r = 0}^{\frac{N}{2}-1}x[2r+1]W_{N/2}^{rk}\times W_N^k$
$= G[k]+H[k]\times W_N^k$
Anfangs haben wir eine Acht-Punkte-Sequenz genommen, aber später haben wir diese in zwei Teile G [k] und H [k] zerlegt. G [k] steht für den geraden Teil, während H [k] für den ungeraden Teil steht. Wenn wir es durch ein Diagramm realisieren wollen, dann kann es wie folgt gezeigt werden -
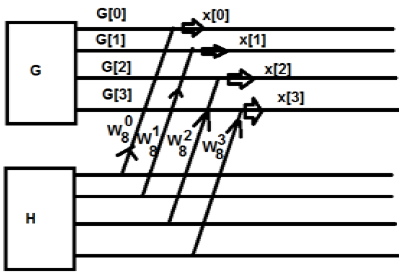
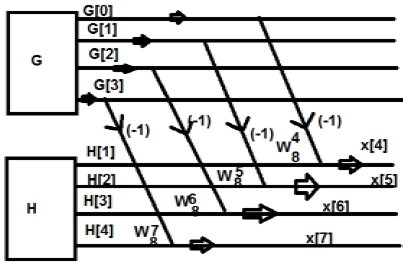
Aus der obigen Abbildung können wir das ersehen
$W_8^4 = -1$
$W_8^5 = -W_8^1$
$W_8^6 = -W_8^2$
$W_8^7 = -W_8^3$
Ebenso können die Endwerte wie folgt geschrieben werden:
$G[0]-H[0] = x[4]$
$G[1]-W_8^1H[1] = x[5]$
$G[2]-W_8^2H[2] = x[6]$
$G[1]-W_8^3H[3] = x[7]$
Die obige ist eine periodische Reihe. Der Nachteil dieses Systems ist, dass K nicht über 4 Punkte hinaus gebrochen werden kann. Lassen Sie uns nun das Obige weiter zerlegen. Wir werden die Strukturen so etwas bekommen
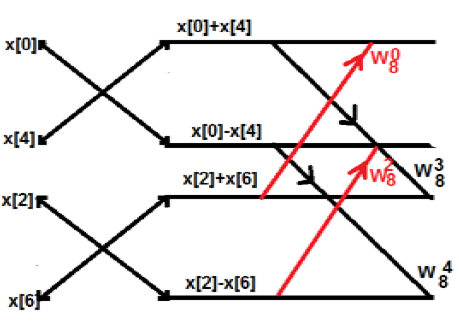
Beispiel
Betrachten Sie die Folge x [n] = {2,1, -1, -3,0,1,2,1}. Berechnen Sie die FFT.
Solution - Die angegebene Sequenz ist x [n] = {2,1, -1, -3,0,1,2,1}
Ordnen Sie die Bedingungen wie unten gezeigt an.
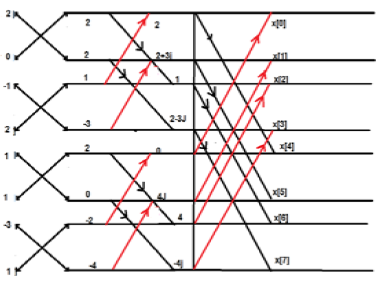
Diese effiziente Speichernutzung ist wichtig für den Entwurf schneller Hardware zur Berechnung der FFT. Der Begriff In-Place-Berechnung wird verwendet, um diese Speichernutzung zu beschreiben.
Dezimierung in zeitlicher Abfolge
In dieser Struktur stellen wir alle Punkte im Binärformat dar, dh in 0 und 1. Dann kehren wir diese Strukturen um. Die Sequenz, die wir danach erhalten, wird als Bitumkehrsequenz bezeichnet. Dies wird auch als Dezimierung in der Zeitfolge bezeichnet. Die In-Place-Berechnung einer Achtpunkt-DFT wird in einem tabellarischen Format angezeigt, wie unten gezeigt -
| PUNKTE | BINÄRFORMAT | UMKEHRUNG | Äquivalente Punkte |
|---|---|---|---|
| 0 | 000 | 000 | 0 |
| 1 | 001 | 100 | 4 |
| 2 | 010 | 010 | 2 |
| 3 | 011 | 110 | 6 |
| 4 | 100 | 001 | 1 |
| 5 | 101 | 101 | 5 |
| 6 | 110 | 011 | 3 |
| 7 | 111 | 111 | 7 |
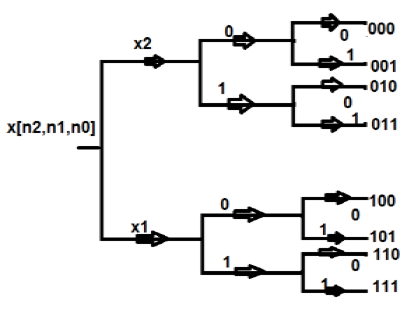
Dezimierung in Frequenzfolge
Neben der Zeitfolge kann auch eine N-Punkt-Folge in der Frequenz dargestellt werden. Nehmen wir eine Vier-Punkte-Sequenz, um sie besser zu verstehen.
Lass die Sequenz sein $x[0], x[1], x[2], x[3], x[4], x[5], x[6], x[7]$. Wir werden zunächst zwei Punkte zu einer Gruppe zusammenfassen. Mathematisch kann diese Sequenz geschrieben werden als;
$$x[k] = \sum_{n = 0}^{N-1}x[n]W_N^{n-k}$$Lassen Sie uns nun eine Gruppe der Folgenummern 0 bis 3 und eine andere Gruppe der Folgenummern 4 bis 7 bilden. Nun kann dies mathematisch wie folgt dargestellt werden:
$$\displaystyle\sum\limits_{n = 0}^{\frac{N}{2}-1}x[n]W_N^{nk}+\displaystyle\sum\limits_{n = N/2}^{N-1}x[n]W_N^{nk}$$Ersetzen wir n durch r, wobei r = 0, 1, 2… (N / 2-1). Mathematisch,
$$\displaystyle\sum\limits_{n = 0}^{\frac{N}{2}-1}x[r]W_{N/2}^{nr}$$Wir nehmen zunächst die ersten vier Punkte (x [0], x [1], x [2], x [3]) und versuchen, sie wie folgt mathematisch darzustellen:
$\sum_{n = 0}^3x[n]W_8^{nk}+\sum_{n = 0}^3x[n+4]W_8^{(n+4)k}$
$= \lbrace \sum_{n = 0}^3x[n]+\sum_{n = 0}^3x[n+4]W_8^{(4)k}\rbrace \times W_8^{nk}$
jetzt $X[0] = \sum_{n = 0}^3(X[n]+X[n+4])$
$X[1] = \sum_{n = 0}^3(X[n]+X[n+4])W_8^{nk}$
$= [X[0]-X[4]+(X[1]-X[5])W_8^1+(X[2]-X[6])W_8^2+(X[3]-X[7])W_8^3$
Wir können es weiter in zwei weitere Teile aufteilen, was bedeutet, dass wir sie nicht als 4-Punkt-Sequenz, sondern in 2-Punkt-Sequenz aufteilen können.
FIR-Filter können bei der computergestützten Gestaltung der Filter hilfreich sein. Nehmen wir ein Beispiel und sehen, wie es funktioniert. Nachstehend ist eine Abbildung des gewünschten Filters angegeben.

Während des Computerdesigns teilen wir die gesamten fortlaufenden Diagrammzahlen in diskrete Werte auf. Innerhalb bestimmter Grenzen teilen wir es in 64, 256 oder 512 (und so weiter) Teile mit diskreten Größen auf.
Im obigen Beispiel haben wir Grenzen zwischen -π bis + π genommen. Wir haben es in 256 Teile geteilt. Die Punkte können als H (0), H (1), ... bis H (256) dargestellt werden. Hier wenden wir den IDFT-Algorithmus an und dies gibt uns lineare Phaseneigenschaften.
Manchmal sind wir an einer bestimmten Filterreihenfolge interessiert. Lassen Sie uns sagen , dass wir die oben angegebene Konstruktion bis 9 realisieren wollen th um Filter. Wir nehmen also Filterwerte als h0, h1, h2… .h9. Mathematisch kann es wie folgt gezeigt werden
$$H(e^{j\omega}) = h_0+h_1e^{-j\omega}+h_2e^{-2j\omega}+.....+h_9e^{-9j\omega}$$Bei einer großen Anzahl von Versetzungen nehmen wir maximale Punkte.
In der obigen Abbildung gibt es beispielsweise einen plötzlichen Abfall zwischen den Punkten B und C. Wir versuchen also, an diesem Punkt diskretere Werte zu verwenden, aber es gibt eine konstante Steigung zwischen Punkt C und D. Dort nehmen wir weniger diskrete Werte.
Zum Entwerfen des obigen Filters gehen wir wie folgt durch den Minimierungsprozess:
$H(e^{j\omega1}) = h_0+h_1e^{-j\omega1}+h_2e^{-2j\omega1}+.....+h_9e^{-9j\omega1}$
$H(e^{j\omega2}) = h_0+h_1e^{-j\omega2}+h_2e^{-2j\omega2}+.....+h_9e^{-9j\omega2}$
Ähnlich,
$(e^{j\omega1000}) = h_0+h_1eH^{-j\omega1000}h_2e^{-2j\omega1000}+.....+h_9+e^{-9j\omega1000}$
Wenn wir die obige Gleichung in Matrixform darstellen, haben wir -
$$\begin{bmatrix}H(e^{j\omega_1})\\.\\.\\H(e^{j\omega_{1000}}) \end{bmatrix} = \begin{bmatrix}e^{-j\omega_1} & ... & e^{-j9\omega_1} \\. & & . \\. & & . \\e^{-j\omega_{1000}} &... & e^{j9\omega_{1000}} \end{bmatrix}\begin{bmatrix}h_0\\.\\.\\h_9\end{bmatrix}$$Nehmen wir die 1000 × 1-Matrix als B, die 1000 × 9-Matrix als A und die 9 × 1-Matrix als $\hat{h}$.
Um die obige Matrix zu lösen, schreiben wir
$\hat{h} = [A^TA]^{-1}A^{T}B$
$= [A^{*T}A]^{-1}A^{*T}B$
wobei A * das komplexe Konjugat der Matrix A darstellt.